一种四足脊椎动物仿生教具
- 国知局
- 2024-06-21 14:12:07
本发明涉及仿生教具,尤其涉及一种四足脊椎动物仿生教具。
背景技术:
1、随着我国社会的发展和教育资源的逐渐丰富,教具行业的市场规模仍不断增大,且对于高质量教具的需求仍有极大的增长空间,目前课堂形式有关教具演示的活动仍有较大完善空间。
2、专利公开号为cn216098968u的实用新型公开了一种具有柔性脊椎的四足仿生机器人,包含前机体、后机体和柔性脊椎,前机体和后机体通过柔性脊椎连接,还包含两条多自由度前腿和两条多自由度后腿;两条多自由度前腿安装在前机体上,两条多自由度后腿安装在后机体上,所述柔性脊椎包含电机、锥齿轮副、脊椎轴、发条组件和连杆弹簧片组件;电机安装在后机体上,电机的输出轴上安装有主动锥齿轮,脊椎轴的一端与后机体固接,被动锥齿轮固定在脊椎轴的另一端,主动锥齿轮和被动锥齿轮啮合,发条盒套在脊椎轴上并与前机体固连,前机体和后机体通过连杆弹簧片组件支撑并能相对转动。本实用新型结构紧凑简便,能适应复杂地形的运动能力,稳定性好。
3、上述技术方案中,为了对四足脊椎动物进行仿生,设置了由电机、锥齿轮副、脊椎轴、发条组件和连杆弹簧片组成的柔性脊椎,由于动物的活动通常会伴随着头部和尾部的协同移动,而此仿生机器人并不能对动物头部和尾部进行联动展示,需要单独驱动调节,不能满足目前课堂的教学展示需求。
技术实现思路
1、有鉴于此,本发明提出了一种四足脊椎动物仿生教具,利用脊椎单元可以带动头部件和尾部件进行晃动,演示仿生动物头、尾及脊椎的联动形态,满足课堂的教学展示需求。
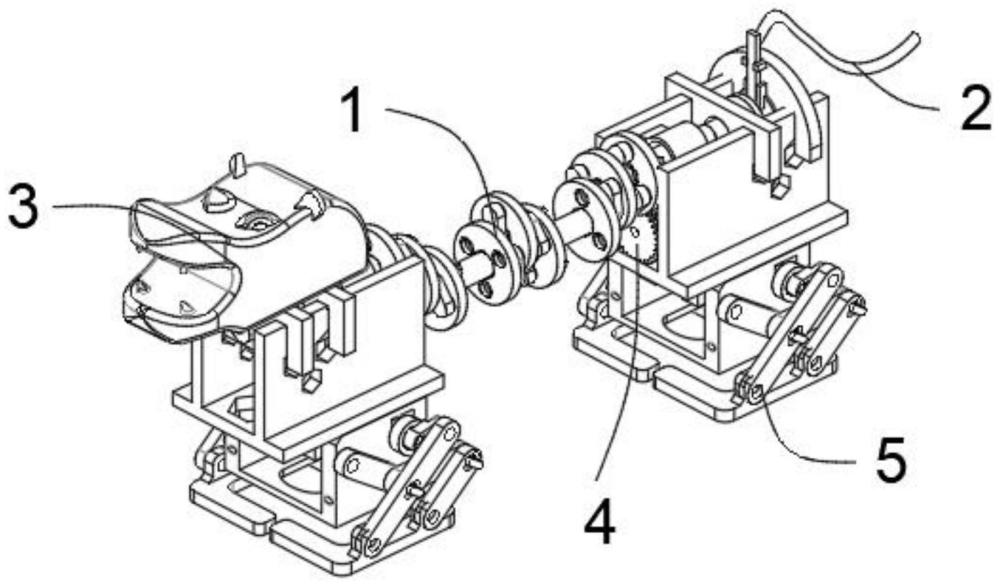
2、本发明的技术方案是这样实现的:本发明提供了一种四足脊椎动物仿生教具,包括脊椎单元、尾部件和头部件,所述脊椎单元包括连接盘、转动盘、转杆和连接轴,其中,
3、所述连接盘的两侧分别设置有一个所述转动盘,且二者平行且间隔设置;
4、所述连接盘与每个所述转动盘之间均设置有三个所述转杆,所述转杆的两端分别与所述连接盘和所述转动盘转动连接,位于所述连接盘同一侧的三个所述转杆等长且呈品字形平行设置;
5、所述转动盘远离所述转杆的一侧固定设置有所述连接轴;
6、所述尾部件和所述头部件相对设置在所述脊椎单元的两端,且两个所述连接轴能够带动所述尾部件和所述头部件进行晃动。
7、在以上技术方案的基础上,优选的,所述尾部件包括尾支座、尾部偏心轮和仿生尾,其中,
8、所述尾支座转动设置在其中一个所述连接轴上;
9、所述尾部偏心轮固定设置在与所述尾支座相连接的所述连接轴上,并与之偏心设置;
10、所述仿生尾滑动设置在所述尾支座上,且其与所述尾部偏心轮的周侧相抵贴,转动所述连接轴时,能够带动所述仿生尾在所述尾支座上进行滑动。
11、更进一步优选的,所述头部件包括头支座、头部偏心轴、摆杆和仿生头,其中,
12、所述头支座转动设置在未与所述尾支座相连接的所述连接轴上;
13、所述头部偏心轴固定设置在与所述头支座相连接的所述连接轴上;
14、所述摆杆的一端转动设置在所述头支座上,且其内部开设有长条孔,所述头部偏心轴滑动设置在所述长条孔内;
15、所述仿生头固定设置在所述摆杆上。
16、更进一步优选的,还包括第一驱动件,所述第一驱动件包括摆动电机和两个齿轮,其中,
17、所述摆动电机固定设置在所述尾支座且/或所述头支座上;
18、一个所述齿轮固定设置在其中一个所述连接轴上,另一个所述齿轮固定设置在所述摆动电机的输出端,且两个所述齿轮相啮合。
19、更进一步优选的,还包括多个第二驱动件,所述第二驱动件包括行走电机、传动机构和仿生足,其中,
20、所述行走电机固定设置在所述尾支座且/或所述头支座上;
21、所述传动机构设置在所述行走电机的输出轴和所述仿生足上,用于带动所述仿生足随着所述行走电机的输出轴的转动而移动。
22、更进一步优选的,所述传动机构包括两个第一连杆、两个第二连杆、第三连杆和第四连杆,其中,
23、所述第一连杆的一端转动设置在所述尾支座或所述头支座上,两个所述第一连杆位于所述尾支座或所述头支座的同一侧,并平行设置;
24、所述第二连杆的一端转动设置在所述仿生足上,两个所述第二连杆平行设置;
25、所述第三连杆的两端分别转动设置在两个所述第一连杆上,并分别转动设置在两个所述第二连杆上,且所述第三连杆、两个所述第一连杆和所述尾支座或所述头支座围合形成平行四边形状结构,所述第三连杆、两个所述第二连杆和所述仿生足围合形成平行四边形状结构;
26、所述第四连杆的一端固定设置在所述行走电机上,另一端与其中一个所述第二连杆转动连接。
27、在以上技术方案的基础上,优选的,所述连接轴呈水平方向设置;
28、所述仿生尾在所述尾支座上沿竖直方向进行滑动,且所述仿生尾的一端与所述尾部偏心轮周侧的顶部相抵贴。
29、更进一步优选的,所述摆杆在与所述连接轴相垂直的平面内进行转动。
30、更进一步优选的,所述第二驱动件设置有四个,分别相对设置在所述尾支座和所述头支座的两侧。
31、在以上技术方案的基础上,优选的,所述脊椎单元并排设置有多个,相连两个所述脊椎单元中相邻的两个连接轴固定连接,位于多个所述脊椎单元两端的两个所述连接轴分别带动所述尾部件和所述头部件进行晃动。
32、本发明的一种四足脊椎动物仿生教具相对于现有技术具有以下有益效果:
33、(1)通过设置连接盘、转动盘、转杆和连接轴,利用其相互配合,不仅可以根据实际需要对两个连接轴的轴线间距进行调节,满足仿生动物的体位需求,还可以在转动其中一个连接轴时让另一个连接轴同步转动,以分别对头部件和尾部件进行晃动,丰富了本仿生教具的形态变化,提升了本仿生教具的教学展示效果;
34、(2)通过设置四个第二驱动件,利用四个行走电机对四个仿生足进行分别驱动,可以实现本仿生教具前后肢的交替移动或同步移动,不仅满足了不同的展示需求,还实现了仿生动物的自动化控制;
35、(3)通过设置多组脊椎单元,不仅可以对不同类型的动物进行仿生,还可以丰富本仿生教具体态变化的丰富性。
技术特征:1.一种四足脊椎动物仿生教具,其特征在于:包括脊椎单元(1)、尾部件(2)和头部件(3),所述脊椎单元(1)包括连接盘(11)、转动盘(12)、转杆(13)和连接轴(14),其中,
2.如权利要求1所述的一种四足脊椎动物仿生教具,其特征在于:所述尾部件(2)包括尾支座(21)、尾部偏心轮(22)和仿生尾(23),其中,
3.如权利要求2所述的一种四足脊椎动物仿生教具,其特征在于:所述头部件(3)包括头支座(31)、头部偏心轴(32)、摆杆(33)和仿生头(34),其中,
4.如权利要求3所述的一种四足脊椎动物仿生教具,其特征在于:还包括第一驱动件(4),所述第一驱动件(4)包括摆动电机(41)和两个齿轮(42),其中,
5.如权利要求4所述的一种四足脊椎动物仿生教具,其特征在于:还包括多个第二驱动件(5),所述第二驱动件(5)包括行走电机(51)、传动机构(52)和仿生足(53),其中,
6.如权利要求5所述的一种四足脊椎动物仿生教具,其特征在于:所述传动机构(52)包括两个第一连杆(521)、两个第二连杆(522)、第三连杆(523)和第四连杆(524),其中,
7.如权利要求3所述的一种四足脊椎动物仿生教具,其特征在于:所述连接轴(14)呈水平方向设置;
8.如权利要求7所述的一种四足脊椎动物仿生教具,其特征在于:所述摆杆(33)在与所述连接轴(14)相垂直的平面内进行转动。
9.如权利要求5所述的一种四足脊椎动物仿生教具,其特征在于:所述第二驱动件(5)设置有四个,分别相对设置在所述尾支座(21)和所述头支座(31)的两侧。
10.如权利要求1所述的一种四足脊椎动物仿生教具,其特征在于:所述脊椎单元(1)并排设置有多个,相连两个所述脊椎单元(1)中相邻的两个连接轴(14)固定连接,位于多个所述脊椎单元(1)两端的两个所述连接轴(14)分别带动所述尾部件(2)和所述头部件(3)进行晃动。
技术总结本发明涉及仿生教具技术领域,提出了一种四足脊椎动物仿生教具,包括脊椎单元、尾部件和头部件,所述脊椎单元包括连接盘、转动盘、转杆和连接轴,所述转杆的两端分别与所述连接盘和所述转动盘转动连接,位于所述连接盘同一侧的三个所述转杆等长且呈品字形平行设置;两个所述连接轴能够带动所述尾部件和所述头部件进行晃动。本发明通过设置连接盘、转动盘、转杆和连接轴,利用其相互配合,不仅可以根据实际需要对两个连接轴的轴线间距进行调节,满足仿生动物的体位需求,还可以在转动其中一个连接轴时让另一个连接轴同步转动,以分别对头部件和尾部件进行晃动,丰富了本仿生教具的形态变化,提升了本仿生教具的教学展示效果。技术研发人员:江艳,柳曾金,周子安,毛天阳,马健钢,孙博韬受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240618/36616.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表