一种无人船勘测用定位装置的制作方法
- 国知局
- 2024-07-17 13:18:02
本技术涉及定位设备,具体为一种无人船勘测用定位装置。
背景技术:
1、无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人,英文缩写为usv。现今,不少国家已开始研制无人船。一些船业巨头甚至乐观预测:也许只需几十年,发展成熟的“幽灵船”技术将改写全球远洋运输的面貌。另有业界人士预计,全球无人船市场规模2019年可能达到大约100亿美元。无人船是用于巡航河道以及各类水体内部的信息监测,而其在进行监测时,便需要用到相应的定位结构来控制无人船的定位巡航。
2、公告号为cn116946316b的中国授权专利文件,提供一种无人船定位巡航控制装置,涉及控制装置技术领域,船体的外侧固定连接有气囊,气囊用于辅助船体漂移,解决了现有的在进行使用时,由于在当无人船进行巡航时,其在遭遇到礁石等异物产生碰撞时很容易导致无人船出现失去动力而导致影响后续对于无人船进行定位的问题,存在着局限性的问题,通过设置有控制器和控制箱以及定位模块,使得装置在进行使用时,不但可以通过启动安装在控制箱外侧的定位模块采用gps以及北斗进行双重的定位操作,并同步的将定位后的信息同步的利用设置在控制箱外侧控制器进行同步的反馈报警操作,使得装置在进行使用时可以更加精准的对于无人船进行定位识别巡航,进一步的提升了装置整体的实用性。
3、上述现有技术中无法对无人船上的gps定位机构进行便捷式组装固定,造成安装拆卸不方便,同时无法对定位装置进行持续稳定供电,因此需要研制一种无人船勘测用定位装置解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种无人船勘测用定位装置,以解决上述背景技术中提出的现有技术中无法对无人船上的gps定位机构进行便捷式组装固定,造成安装拆卸不方便,同时无法对定位装置进行持续稳定供电的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种无人船勘测用定位装置,包括无人船主体,所述无人船主体上安装有固定桅杆,固定桅杆通过锁紧机构固定连接有定位机盒,所述固定桅杆的顶端安装有太阳能面板,太阳能面板的下方安装有光电转换器,太阳能面板与光电转换器之间电性连接,光电转换器通过电源导线与设置在定位机盒内部的电源电池相连接,所述定位机盒的上端表面设置有充电接口,定位机盒的侧表面分别设置有gps定位器和电量指示灯,gps定位器和电量指示灯均通过导线与电源电池相连接。
3、基于上述,所述定位机盒的内部设置有电池机槽,电源电池安装在电池机槽的内部。
4、基于上述,所述锁紧机构包括第一伸缩环、限位卡扣和第二伸缩环。
5、基于上述,所述限位卡扣设置在第一伸缩环和第二伸缩环之间,限位卡扣的表面开设有限位槽孔。
6、基于上述,所述限位卡扣通过限位螺钉贯穿限位槽孔与固定桅杆固定连接,第一伸缩环和第二伸缩环的内表壁与固定桅杆的表面紧密贴合固定。
7、基于上述,所述定位机盒的两侧表面设置有收纳槽,定位机盒的前端表面通过铰链活动连接有密封盖板。
8、基于上述,所述第一伸缩环和第二伸缩环为可伸缩调节式带状结构,第一伸缩环和第二伸缩环的两端穿过收纳槽延伸至定位机盒的内部。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型通过设置有便捷式组装固定的定位机盒,利用锁紧机构上可伸缩调节的第一伸缩环和第二伸缩环,将其抽出与固定桅杆表面紧密贴合固定,随后通过限位螺钉配合限位卡扣,方便将其快速安装固定在无人船主体的固定桅杆上,起到安装和拆卸方便的作用,同时设置有光伏供电机构和可充电的电池电源,便于对gps定位器等元器件进行便捷式持续供电,从而保障定位器的安全稳定运行。
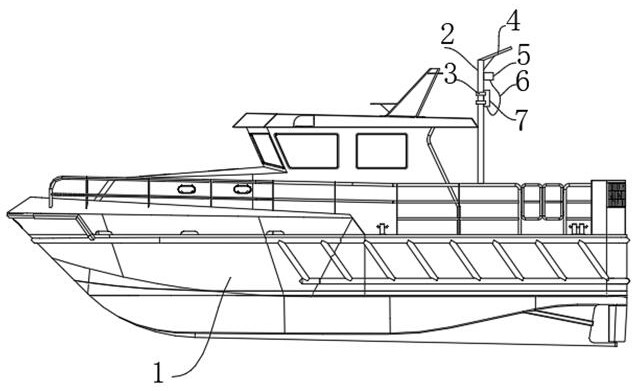
技术特征:1.一种无人船勘测用定位装置,包括无人船主体(1),其特征在于,所述无人船主体(1)上安装有固定桅杆(2),固定桅杆(2)通过锁紧机构(3)固定连接有定位机盒(7),所述固定桅杆(2)的顶端安装有太阳能面板(4),太阳能面板(4)的下方安装有光电转换器(5),太阳能面板(4)与光电转换器(5)之间电性连接,光电转换器(5)通过电源导线(6)与设置在定位机盒(7)内部的电源电池(16)相连接,所述定位机盒(7)的上端表面设置有充电接口(14),定位机盒(7)的侧表面分别设置有gps定位器(13)和电量指示灯(19),gps定位器(13)和电量指示灯(19)均通过导线与电源电池(16)相连接。
2.根据权利要求1所述的一种无人船勘测用定位装置,其特征在于:所述定位机盒(7)的内部设置有电池机槽(15),电源电池(16)安装在电池机槽(15)的内部。
3.根据权利要求1所述的一种无人船勘测用定位装置,其特征在于:所述锁紧机构(3)包括第一伸缩环(8)、限位卡扣(9)和第二伸缩环(12)。
4.根据权利要求3所述的一种无人船勘测用定位装置,其特征在于:所述限位卡扣(9)设置在第一伸缩环(8)和第二伸缩环(12)之间,限位卡扣(9)的表面开设有限位槽孔(10)。
5.根据权利要求4所述的一种无人船勘测用定位装置,其特征在于:所述限位卡扣(9)通过限位螺钉(11)贯穿限位槽孔(10)与固定桅杆(2)固定连接,第一伸缩环(8)和第二伸缩环(12)的内表壁与固定桅杆(2)的表面紧密贴合固定。
6.根据权利要求1所述的一种无人船勘测用定位装置,其特征在于:所述定位机盒(7)的两侧表面设置有收纳槽(18),定位机盒(7)的前端表面通过铰链活动连接有密封盖板(17)。
7.根据权利要求5所述的一种无人船勘测用定位装置,其特征在于:所述第一伸缩环(8)和第二伸缩环(12)为可伸缩调节式带状结构,第一伸缩环(8)和第二伸缩环(12)的两端穿过收纳槽(18)延伸至定位机盒(7)的内部。
技术总结本技术公开了一种无人船勘测用定位装置,包括无人船主体,所述无人船主体上安装有固定桅杆,固定桅杆通过锁紧机构固定连接有定位机盒,所述固定桅杆的顶端安装有太阳能面板,光电转换器通过电源导线与设置在定位机盒内部的电源电池相连接,所述定位机盒的上端表面设置有充电接口,定位机盒的侧表面分别设置有GPS定位器和电量指示灯,GPS定位器和电量指示灯均通过导线与电源电池相连接。本技术通过设置有便捷式组装固定的定位机盒,方便将其快速安装固定在无人船主体的固定桅杆上,起到安装和拆卸方便的作用,同时设置有光伏供电机构和可充电的电池电源,便于对GPS定位器等元器件进行便捷式持续供电,从而保障定位器的安全稳定运行。技术研发人员:刘国亮,肖波,黄晓峰,张化,李雨洋,刘芬,蔡松,范三强受保护的技术使用者:荆州市河道管理技术中心技术研发日:20240205技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240711/108852.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表