作业执行机构及智能行走设备的制作方法
- 国知局
- 2024-07-17 13:10:29
本申请实施例涉及机械设备,尤其涉及一种作业执行机构及智能行走设备。
背景技术:
1、智能行走设备是一种能够按照规划路径行走的设备。智能行走设备包括机身、行走部和工作机构,行走部和工作机构均安装在机身上,行走部带动机身行走,在行走时,工作机构可以对位于规划区域中目标事物执行相应动作。例如,执行割草动作、执行洒水动作或执行吹扫动作。
2、但是实际生产生活中,为了保证安全,通常会在设定规划路径时,使智能行走设备的工作机构能够与规划区域的边界保持安全距离。该安全距离会导致工作机构不能对边界附近的目标事物执行相应动作,也即,边界附近的目标事物成为了盲区,往往还需要人工来对盲区的目标事物执行相应动作,这并不利于减轻人工负担。
3、例如,智能行走设备是一种割草机时,割草机在行走时,工作机构为切割机构,切割机构和规划区域的边界之间具有安全距离,那么,位于安全距离内的草就不能被切割机构切割。最后,位于安全距离内的草还需要人工来将安全距离内的草清除掉。
技术实现思路
1、为了解决上述问题,本申请实施例提供了一种作业执行机构和智能行走设备,以至少部分地解决上述问题。
2、本申请的一个或多个实施例提供了一种作业执行机构,用于和智能行走设备的机身连接,包括工作机构、连接机构和动力机构;所述连接机构包括相对的两端,一端和所述机身枢转连接,另一端和所述工作机构连接,所述连接机构能够带动所述工作机构在收回位置和释放位置之间往复运动;所述动力机构与所述连接机构连接,所述动力机构用于驱动所述连接机构相对于所述机身枢转运动;当所述工作机构位于所述收回位置时,所述工作机构和所述机身中心线间隔第一距离,所述工作机构位于所述释放位置时,所述工作机构和所述机身中心线间隔第二距离,所述第一距离小于所述第二距离。
3、可选的,所述连接机构带动所述工作机构在所述收回位置和所述释放位置之间往复运动的过程中,所述工作机构的作业朝向和所述机身的前进方向保持平行。
4、可选的,所述连接机构包括第一连杆和第二连杆,所述第一连杆包括相对的第一端和第二端,所述第一端绕第一轴线枢转连接于所述机身,所述第二端绕第二轴线枢转连接于所述工作机构;所述第二连杆包括相对的第三端和第四端,所述第三端与所述机身绕第三轴线枢转连接,所述第四端与所述工作机构绕第四轴线枢转连接;所述第一轴线、所述第二轴线、第三轴线均与所述第四轴线平行;所述第一轴线和所述第二轴线之间的距离,等于所述第三轴线和所述第四轴线之间的距离;所述第一轴线和所述第三轴线之间的距离,等于所述第二轴线和所述第四轴线之间的距离。
5、可选的,所述动力机构包括弹性件,所述弹性件连接在所述连接机构和所述机身之间,和/或,所述弹性件连接在所述连接机构和所述工作机构之间;所述弹性件向所述连接机构施加能够使所述连接机构带动所述工作机构从所述收回位置朝向所述释放位置枢转的弹性力。
6、可选的,所述弹性件连接在所述工作机构和所述第一连杆之间,和/或,所述弹性件连接在所述工作机构和所述第二连杆之间。
7、可选的,所述弹性件连接在所述机身和所述第一连杆之间,和/或,所述弹性件连接在所述机身和所述第二连杆之间。
8、可选的,所述弹性件为扭簧,所述扭簧包括两个引脚,一个所述引脚连接在所述机身上,另一个所述引脚连接在所述第一连杆或所述第二连杆上。
9、可选的,所述第一连杆和所述机身这两者的一者上设置有第一容纳孔,另一者上设置有第一转轴,所述第一转轴可枢转的插入所述第一容纳孔中,以使所述第一连杆相对于所述机身绕所述第一轴线枢转;所述扭簧套设在所述第一转轴上,扭簧的另一个引脚位于第一容纳孔外并连接在所述第一连杆上。
10、可选的,所述动力机构包括转动电机,转动电机的输出轴与连接机构连接,驱动连接机构带动工作机构转动。
11、可选的,所述工作机构还包括限位机构,所述限位机构向所述连接机构施加限位力,以通过所述连接机构将所述工作机构限制在所述收回位置。
12、可选的,所述限位机构包括限位件,所述限位件在避让位置和止挡位置之间往复运动,当所述限位件位于所述避让位置时,允许所述连接机构带动所述工作机构在所述释放位置和所述收回位置之间往复运动;当所述限位件位于所述止挡位置时,阻止所述连接机构带动所述工作机构从所述收回位置朝向所述释放位置枢转。
13、可选的,所述限位机构还包括驱动部,所述驱动部驱动所述限位件绕预设轴线转动,所述限位件和所述预设轴线间隔分布,所述连接机构和所述机身的枢转轴线与所述预设轴线平行,所述限位件位于所述连接机构的朝向所述释放位置的一侧。
14、可选的,所述限位机构为电磁插销锁,所述限位件为插销,所述插销沿自身轴向在避让位置和止挡位置之间往复运动;所述插销位于所述避让位置时远离所述连接机构的枢转路径,以允许所述连接机构带动所述工作机构朝向所述释放位置枢转;所述插销位于所述止挡位置时,阻止所述连接机构带动所述工作机构从所述收回位置朝向所述释放位置枢转。
15、可选的,所述限位机构包括电磁铁和电控部,所述连接机构上设置有磁体;所述电控部控制所述电磁铁通电或断电,所述电磁铁在通电状态下具有磁性,并能够与所述磁体相吸,以将所述工作机构限制在所述收回位置,所述电磁铁在断电状态下无磁性。
16、可选的,所述机身上设置有第一限位部,当所述连接机构带动所述工作机构运动至所述释放位置时,所述动力机构的作用力使所述连接机构抵靠在所述第一限位部上。
17、第二方面,本申请还一种智能行走设备,包括机身和上述的作业执行机构,所述作业执行机构安装在所述机身上。
18、基于本申请提供的上述作业执行机构,在动力机构的作用下,可以使工作机构位于机身朝向地面的投影区域外,以对目标事物执行相应动作,当工作机构遇到障碍物时,在障碍物的抵推作用下,或在动力机构的带动下,工作机构和连接机构一起朝向机身枢转,从而可以达到避让障碍物的效果。
技术特征:1.一种作业执行机构,用于和智能行走设备的机身(10)连接,其特征在于,包括工作机构(20)、连接机构(30)和动力机构(40);
2.根据权利要求1所述的作业执行机构,其特征在于,所述连接机构(30)带动所述工作机构(20)在所述收回位置和所述释放位置之间往复运动的过程中,所述工作机构(20)的作业朝向x和所述机身(10)的前进方向y保持平行。
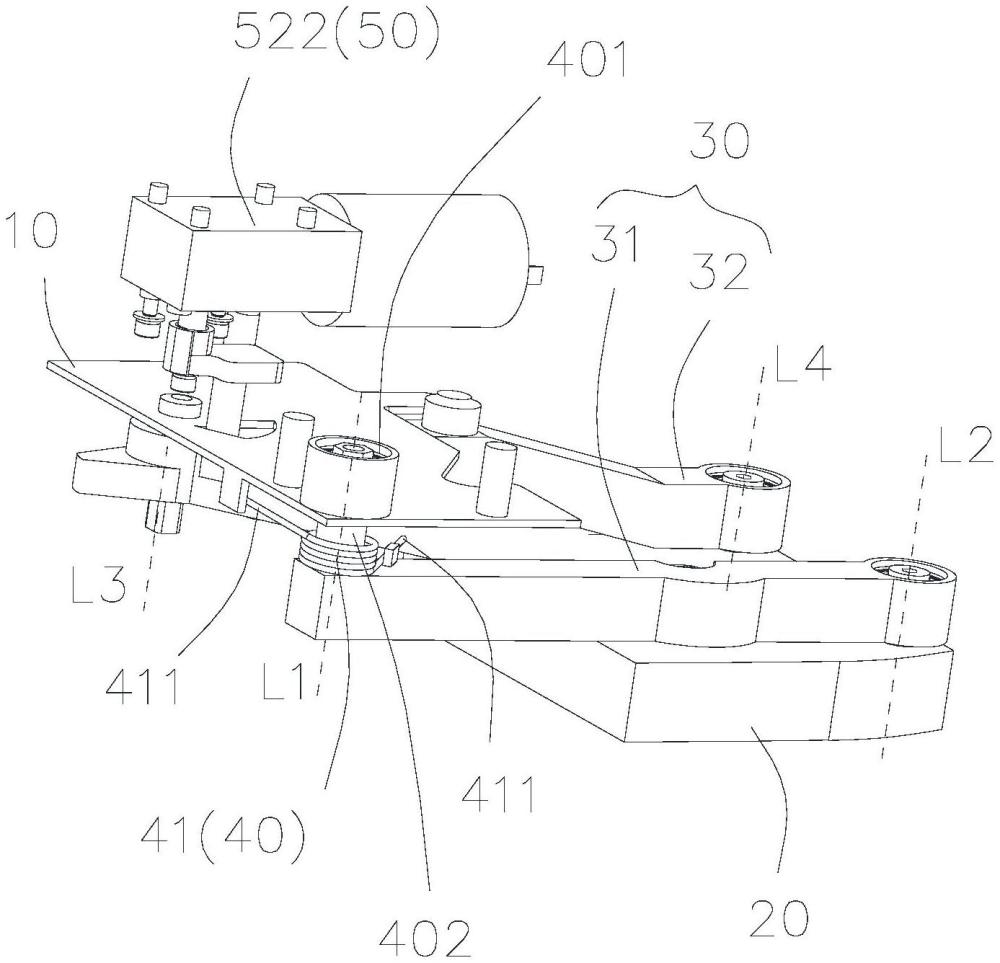
3.根据权利要求2所述的作业执行机构,其特征在于,所述连接机构(30)包括第一连杆(31)和第二连杆(32),所述第一连杆(31)包括相对的第一端和第二端,所述第一端绕第一轴线(l1)枢转连接于所述机身(10),所述第二端绕第二轴线(l2)枢转连接于所述工作机构(20);
4.根据权利要求3所述的作业执行机构,其特征在于,所述动力机构(40)包括弹性件(41),所述弹性件(41)连接在所述连接机构(30)和所述机身(10)之间,和/或,所述弹性件(41)连接在所述连接机构(30)和所述工作机构(20)之间;所述弹性件(41)向所述连接机构(30)施加能够使所述连接机构(30)带动所述工作机构(20)从所述收回位置朝向所述释放位置枢转的弹性力。
5.根据权利要求4所述的作业执行机构,其特征在于,所述弹性件(41)连接在所述工作机构(20)和所述第一连杆(31)之间,和/或,所述弹性件(41)连接在所述工作机构(20)和所述第二连杆(32)之间。
6.根据权利要求4所述的作业执行机构,其特征在于,所述弹性件(41)连接在所述机身(10)和所述第一连杆(31)之间,和/或,所述弹性件(41)连接在所述机身(10)和所述第二连杆(32)之间。
7.根据权利要求6所述的作业执行机构,其特征在于,所述弹性件(41)为扭簧,所述扭簧包括两个引脚(411),一个所述引脚(411)连接在所述机身(10)上,另一个所述引脚(411)连接在所述第一连杆(31)或所述第二连杆(32)上。
8.根据权利要求7所述的作业执行机构,其特征在于,所述第一连杆(31)和所述机身(10)这两者的一者上设置有第一容纳孔(401),另一者上设置有第一转轴(402),所述第一转轴(402)可枢转的插入所述第一容纳孔(401)中,以使所述第一连杆(31)相对于所述机身(10)绕所述第一轴线(l1)枢转;所述扭簧套设在所述第一转轴(402)上,所述扭簧的另一个引脚(411)位于第一容纳孔(401)外并连接在所述第一连杆(31)上。
9.根据权利要求1所述的作业执行机构,其特征在于,所述动力机构(40)包括转动电机,转动电机的输出轴与连接机构(30)连接,驱动连接机构带动工作机构转动。
10.根据权利要求1所述的作业执行机构,其特征在于,所述作业执行机构还包括限位机构(50),所述限位机构(50)向所述连接机构(30)施加限位力,以通过所述连接机构(30)将所述工作机构(20)限制在所述收回位置。
11.根据权利要求10所述的作业执行机构,其特征在于,所述限位机构(50)包括限位件(521),所述限位件(521)在避让位置和止挡位置之间往复运动,当所述限位件(521)位于所述避让位置时,允许所述连接机构(30)带动所述工作机构(20)在所述释放位置和所述收回位置之间往复运动;当所述限位件(521)位于所述止挡位置时,阻止所述连接机构(30)带动所述工作机构(20)从所述收回位置朝向所述释放位置枢转。
12.根据权利要求11所述的作业执行机构,其特征在于,所述限位机构(50)还包括驱动部(522),
13.根据权利要求11所述的作业执行机构,其特征在于,所述限位机构(50)为电磁插销锁,所述限位件(521)为插销,所述插销沿自身轴向在避让位置和止挡位置之间往复运动;
14.根据权利要求10所述的作业执行机构,其特征在于,所述限位机构(50)包括电磁铁和电控部,所述连接机构(30)上设置有磁体;
15.根据权利要求1所述的作业执行机构,其特征在于,所述机身(10)上设置有第一限位部(11),当所述连接机构(30)带动所述工作机构(20)运动至所述释放位置时,所述动力机构(40)的作用力使所述连接机构(30)抵靠在所述第一限位部(11)上。
16.一种智能行走设备,其特征在于,包括机身(10)和上述权利要求1-15中任一项所述的作业执行机构,所述作业执行机构安装在所述机身(10)上。
技术总结本技术提供一种作业执行机构及智能行走设备,作业执行机构包括工作机构、连接机构和动力机构;连接机构的一端和机身枢转连接,另一端和工作机构连接,连接机构能够带动工作机构在收回位置和释放位置之间往复运动;动力机构与连接机构连接,动力机构用于驱动连接机构相对于机身枢转运动;当工作机构位于收回位置时,工作机构和机身中心线间隔第一距离,工作机构位于收回位置时,工作机构和机身中心线间隔第二距离,第一距离小于第二距离。如此,当遇到障碍物时,障碍物可以将工作机构朝向机身抵推或,动力机构可以驱动工作机构朝向机身运动,从而可以达到避让效果。技术研发人员:崔俊伟,乔万阳,李增洋受保护的技术使用者:未岚大陆(北京)科技有限公司技术研发日:20231208技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/108482.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表