一种用于自动驾驶车载前置环视高稳定性摄像镜头的制作方法
- 国知局
- 2024-08-05 13:35:02
本技术涉及一种高分辨率的镜头,具体涉及一种结构简单、成像质量高,能有效拍出最真实照片的用于自动驾驶车载前置环视高稳定性摄像镜头。
背景技术:
1、受到高端汽车智能化影响,人工智能、通讯与感测技术的不断发展,我们距离实现自动驾驶又更近一步。无论是科技企业,还是传统汽车车厂都开始投入大量研发资源推动完全自动化发展。3d摄影技术是实现自动驾驶中的重中之重。
2、目前市面上产品的多为塑料结构,且光圈较小。因此,只是第一代车载镜头,在实际应用中的扩展性较弱,且稳定性较差,无法适用于高端的成像系统。
3、传统技术的缺点:
4、(1)、传统技术制造的镜头在强光下拍摄时会产生鬼影;
5、(2)、传统技术制造的、镜头光圈较小,在暗光环境下拍摄出的画面质量很差,不适合全天候使用;
6、(3、)传统技术制造的镜头强度较低,在相对恶劣的条件下使用,易发生损坏。
7、导致上述缺点的原因:
8、(1)、相机的镜头是由多枚镜片构成的,镜片则是采用玻璃或塑料等材料制造,如果不进行特殊处理,镜头表面会反射大约5%左右的入射光线。当强光进入镜头时,各枚镜片和相机内部会产生多次反射,并在金属子件表面进行反射,从而在实际拍摄中我们所看到的现象便是鬼影。
9、(2)、将镜头做成大光圈受很多因数的制约,孔越大,成像清晰需要的镜片越复杂,且每种镜头结构都有其极限光圈,光圈越大的结构也越复杂,而复杂的结构又会带来很多负面影响。其中影响最大的有:①多次反射带来的损失②装配精度的要求非常高。
10、(3)、塑料镜片的环境耐久性和成像稳定性差,在极端环境中长时间使用会出现像质下降。
技术实现思路
1、针对上述问题,本实用新型的主要目的在于提供一种结构简单、成像质量高,能有效拍出最真实照片的用于自动驾驶车载前置环视高稳定性摄像镜头。
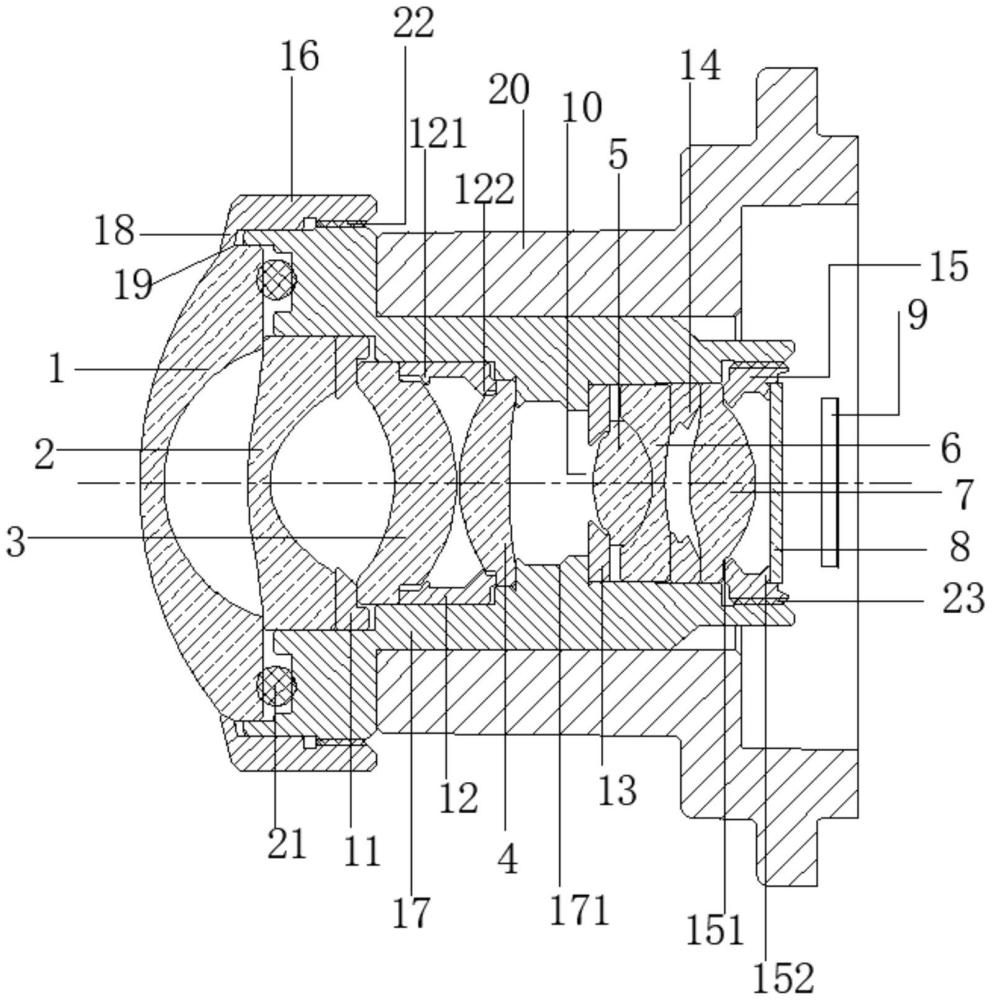
2、本实用新型是通过下述技术方案来解决上述技术问题的:一种用于自动驾驶车载前置环视高稳定性摄像镜头,所述用于自动驾驶车载前置环视高稳定性摄像镜头包括:第一镜片、第二镜片、第三镜片、第四镜片、第五镜片、第六镜片、第七镜片、第八镜片、第九镜片、镜筒、镜帽、光阑孔面、外壳,从镜头的物体空间到像面依次为:第一镜片、第二镜片、第三镜片、第四镜片、光阑孔面、第五镜片、第六镜片、第七镜片、第八镜片,第八镜片为滤光片,第九镜片为芯片保护玻璃。
3、第二镜片、第三镜片、第四镜片、第五镜片、第六镜片、第七镜片、第八镜片均安装在镜筒内,第一镜片部分安装在镜筒内,部分安装在镜帽内,第九镜片安装在外壳内。
4、第二镜片和第三镜片之间设置有第一卡圈,第三镜片和第四镜片之间设置有第二卡圈,第二卡圈上设置有卡第三镜片和第四镜片的第二卡圈第一凸起和第二卡圈第二凸起。
5、第四镜片和第五镜片之间设置有第三卡圈,第三卡圈和第四镜片之间还设置有和镜筒一体的镜筒凸起。
6、第六镜片和第七镜片之间设置有第四卡圈,第七镜片和第八镜片之间设置有第五卡圈,第五卡圈上设置有卡第七镜片和第八镜片的第五卡圈第一凸起和第五卡圈第二凸起。
7、第一镜片和镜筒之间设置有第一密封圈,镜筒上设置有安装第一密封圈的凹槽。
8、镜帽和镜筒之间设置有第二密封圈,镜筒和第五卡圈之间设置有第三密封圈,镜帽上设置有卡第一镜片的倒钩,第一镜片上设置有与倒钩配合的平面部分。
9、在本实用新型的具体实施例子中,所述第一镜片的物面为球面,曲率半径为12.002mm,第一镜片的中心厚度为0.8mm;第一镜片的像面为球面,曲率半径为4.636mm,第一镜片的像面距离第二镜片物面的中心顶点的距离为2.762mm。
10、在本实用新型的具体实施例子中,所述第二镜片的物面为球面,曲率半径为9.917mm,第二镜片的中心厚度为0.75mm;第二镜片的像面为球面,曲率半径为2.28mm,第二镜片的像面距离第三镜片物面表面的中心顶点4.085mm。
11、在本实用新型的具体实施例子中,所述第三镜片的物面为球面,曲率半径为-4.829mm,第三镜片的中心厚度为2.049mm;第三镜片的像面为球面,曲率半径为-5.36mm,第三镜片的像面距离第四镜片物面的中心顶点的距离为0.1mm。
12、在本实用新型的具体实施例子中,所述第四镜片的物面为球面,曲率半径为5.2mm,第四镜片的中心厚度为1.648mm;第四镜片的像面为球面,曲率半径为18.915mm,第四镜片的像面距离光阑孔面的距离为2.677mm,光阑孔面距离第五镜片物面的中心顶点的距离为0.1mm。
13、在本实用新型的具体实施例子中,所述第五镜片的物面为球面,曲率半径为4.040mm,第五镜片的中心厚度为1.950mm;第五镜片的像面为球面,曲率半径为-2.774mm,第五镜片的像面距离第六镜片物面的中心顶点的距离为0。
14、在本实用新型的具体实施例子中,所述第六镜片的物面为球面,曲率半径为-2.774mm,第六镜片的中心厚度为0.400mm;第六镜片的像面为球面,曲率半径为7.872mm,第六镜片的像面距离第七镜片物面的中心顶点的距离为0.806mm。
15、在本实用新型的具体实施例子中,所述第七镜片的物面为球面,曲率半径为4.272mm,第七镜片的中心厚度为2.191mm;第七镜片的像面为球面,曲率半径为-3.363mm,第七镜片的像面距离第八镜片物面的中心顶点的距离为0.501mm。
16、在本实用新型的具体实施例子中,所述第八镜片和的第九镜片和物面和像面均为平面,第八镜片厚度为0.400mm,所述第九镜片的厚度为:0.500mm;第八镜片的像面距离第九镜片物面的距离为1.269mm。
17、在本实用新型的具体实施例子中,所述第一镜片、第二镜片、第三镜片、第四镜片、第五镜片、第六镜片、第七镜片、第八镜片和第九镜片的像面和物面均为镀有bbar膜的镜片。
18、本实用新型的积极进步效果在于:本实用新型提供的用于自动驾驶车载前置环视高稳定性摄像镜头有如下优点:
19、本实用新型的镜筒使用铝材al6061,既减轻了重量,又提高了镜头的强度,且表面进行氧化和发黑,可以有效吸收杂散光的反射。
20、本实用新型高环境适应性:能够通过车载用途的可靠性测试,防护等级达到ip6k9k。
21、本实用新型镜片部分表面镀bbar膜以减少反射光,在很大程度上吸收并分散了镜头内部产生的杂散光,使像面的杂散光能量大幅减少。
22、本实用新型边缘像质高,特殊的畸变形式,有利于对全像面信息的捕捉。
23、本实用新型能在-40~+125℃工作温度。
24、在光学设计过程中,综合考虑增加镜片数量、调整排布、优化形状及材料,保证了镜头的稳定性。
技术特征:1.一种用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述用于自动驾驶车载前置环视高稳定性摄像镜头包括:第一镜片、第二镜片、第三镜片、第四镜片、第五镜片、第六镜片、第七镜片、第八镜片、第九镜片、镜筒、镜帽、光阑孔面、外壳,从镜头的物体空间到像面依次为:第一镜片、第二镜片、第三镜片、第四镜片、光阑孔面、第五镜片、第六镜片、第七镜片、第八镜片,第八镜片为滤光片,第九镜片为芯片保护玻璃,
2.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第一镜片的物面为球面,曲率半径为12.002mm,第一镜片的中心厚度为0.8mm;第一镜片的像面为球面,曲率半径为4.636mm,第一镜片的像面距离第二镜片物面的中心顶点的距离为2.762mm。
3.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第二镜片的物面为球面,曲率半径为9.917mm,第二镜片的中心厚度为0.75mm;第二镜片的像面为球面,曲率半径为2.28mm,第二镜片的像面距离第三镜片物面表面的中心顶点4.085mm。
4.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第三镜片的物面为球面,曲率半径为-4.829mm,第三镜片的中心厚度为2.049mm;第三镜片的像面为球面,曲率半径为-5.36mm,第三镜片的像面距离第四镜片物面的中心顶点的距离为0.1mm。
5.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第四镜片的物面为球面,曲率半径为5.2mm,第四镜片的中心厚度为1.648mm;第四镜片的像面为球面,曲率半径为18.915mm,第四镜片的像面距离光阑孔面的距离为2.677mm,光阑孔面距离第五镜片物面的中心顶点的距离为0.1mm。
6.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第五镜片的物面为球面,曲率半径为4.040mm,第五镜片的中心厚度为1.950mm;第五镜片的像面为球面,曲率半径为-2.774mm,第五镜片的像面距离第六镜片物面的中心顶点的距离为0。
7.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第六镜片的物面为球面,曲率半径为-2.774mm,第六镜片的中心厚度为0.400mm;第六镜片的像面为球面,曲率半径为7.872mm,第六镜片的像面距离第七镜片物面的中心顶点的距离为0.806mm。
8.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第七镜片的物面为球面,曲率半径为4.272mm,第七镜片的中心厚度为2.191mm;第七镜片的像面为球面,曲率半径为-3.363mm,第七镜片的像面距离第八镜片物面的中心顶点的距离为0.501mm。
9.根据权利要求1所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第八镜片和的第九镜片和物面和像面均为平面,第八镜片厚度为0.400mm,所述第九镜片的厚度为:0.500mm;第八镜片的像面距离第九镜片物面的距离为1.269mm。
10.根据权利要求1至9之一所述的用于自动驾驶车载前置环视高稳定性摄像镜头,其特征在于:所述第一镜片、第二镜片、第三镜片、第四镜片、第五镜片、第六镜片、第七镜片、第八镜片和第九镜片的像面和物面均为镀有bbar膜的镜片。
技术总结本技术涉及一种用于自动驾驶车载前置环视高稳定性摄像镜头,从镜头的物体空间到像面依次为:第一、二、三、四镜片、光阑孔面、第五、六、七、八、九镜片,第九镜片的像面为保护玻璃片的像面外为成像面;所有镜片的像面和物面均为镀有BBAR膜的镜片;以减少反射光,在很大程度上吸收并分散了镜头内部产生的杂散光。部分镜片和镜片之间设置有卡圈,部分卡圈上设置有固定镜片的卡圈凸起。本技术重量轻、强度高。本技术重量轻,强度高,具有高环境适应性,耐温性好,镜头的畸变小,能有效拍出最真实的照片。在光学设计过程中,综合考虑增加镜片数量、调整排布、优化形状及材料,保证了镜头的稳定性。技术研发人员:宁小刚,高攀受保护的技术使用者:桑来斯光电科技(上海)有限公司技术研发日:20231219技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240720/268141.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表