一款可以精确控制电机转动位置和角度的电路的制作方法
- 国知局
- 2024-08-05 13:50:37
本申请涉及电机控制,尤其涉及一款可以精确控制电机转动位置和角度的电路。
背景技术:
1、永磁同步交流伺服电动机、永磁无刷直流电动机、开关磁阻电动机等各类要求高精度位置反馈控制的场合,即利用转子位置反馈的数字脉冲信号进行电机的角度、位置控制的场合,采用直接利用位置信号控制的话,其精度受到脉冲频率的限制,尤其是永磁无刷直流电动机和开关磁阻电动机,直接采用转子位置信号进行角度控制几乎不可能,因为每个脉冲的角度太大,数字化的单片机只能通过一个个的整脉冲计数来通断控制;而永磁同步交流伺服电机虽然其位置传感器即光电编码器已然能达到旋转一周一万个转子位置脉冲的精度,但在某些要求高精度的场合也难满足要求。因而本申请提供一款可以精确控制电机转动位置和角度的电路。
技术实现思路
1、本申请要解决的技术问题是提供一款可以精确控制电机转动位置和角度的电路,精确掌握电机的角度位置状态。
2、为解决上述问题,提供以下技术方案:
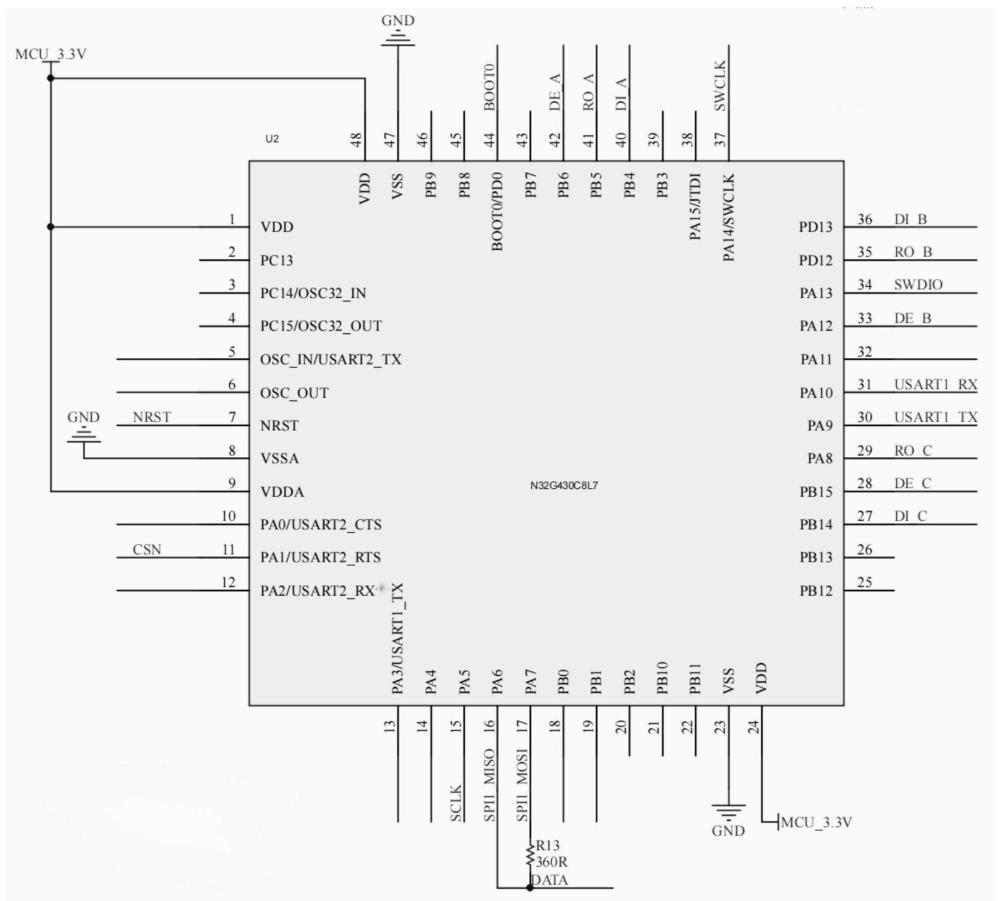
3、本方案的一款可以精确控制电机转动位置和角度的电路,它包括主控模块、485通信模块、电源的输入模块和磁编码模块,所述电源的输入模块向主控模块供电,所述485通信模块和磁编码模块均与主控模块连接,所述电源的输入模块包括型号为78l33的稳压芯片u5,所述485通信模块包括型号为tp8485e的485收发器u1、u3、u4,所述主控模块包括型号为n32g430c8l7的微控制器u2,所述磁编码模块包括型号为vce2755的磁编码器u6。
4、所述485收发器u1的引脚1、3、4分别与微控制器u2的引脚35、33、36连接;485收发器u3的引脚1、3、4分别与微控制器u2的引脚41、42、40连接;485收发器u4的引脚1、3、4分别与微控制器u2的引脚29、28、27连接。
5、所述稳压芯片u5的引脚3连接vin,稳压芯片u5的引脚2接地,稳压芯片u5的引脚1输出vcc,vcc经过电平转换电路分别转换电压mcu3.3v和s3.3v。
6、所述磁编码器u6的引脚2与微控制器u2的15连接,引脚3与微控制器u2的引脚11连接,微控制器u2的引脚17串联电阻r13与磁编码器u6的引脚4连接,磁编码器u6的引脚4与电阻r13之间连接微控制器u2的引脚16,电阻r13为360欧。
7、所述微控制器u2的引脚24连接mcu3.3v,微控制器u2的引脚23接地。
8、所述485收发器u1的引脚1和微控制器u2的引脚35之间连接电阻r2且电阻r2的一端连接s3.3v,485收发器u3的引脚1和微控制器u2的引脚41之间连接电阻r7且电阻r7的一端连接s3.3v,485收发器u4的引脚1和微控制器u2的引脚29之间连接电阻r11且电阻r11的一端连接s3.3,r2、r7和r11均为10千欧。
9、采取以上方案,具有以下优点:
10、在本方案中,利用磁编码器和三组485收发器与微控制器连接,实现了电机位置的精确角度和精确位置控制。
技术特征:1.一款可以精确控制电机转动位置和角度的电路,其特征在于,包括主控模块、485通信模块、电源的输入模块和磁编码模块,所述电源的输入模块向主控模块供电,所述485通信模块和磁编码模块均与主控模块连接,所述电源的输入模块包括型号为78l33的稳压芯片u5,所述485通信模块包括型号为tp8485e的485收发器u1、u3、u4,所述主控模块包括型号为n32g430c8l7的微控制器u2,所述磁编码模块包括型号为vce2755的磁编码器u6。
2.如权利要求1所述的一款可以精确控制电机转动位置和角度的电路,其特征在于,所述485收发器u1的引脚1、3、4分别与微控制器u2的引脚35、33、36连接;485收发器u3的引脚1、3、4分别与微控制器u2的引脚41、42、40连接;485收发器u4的引脚1、3、4分别与微控制器u2的引脚29、28、27连接。
3.如权利要求2所述的一款可以精确控制电机转动位置和角度的电路,其特征在于,所述稳压芯片u5的引脚3连接vin,稳压芯片u5的引脚2接地,稳压芯片u5的引脚1输出vcc,vcc经过电平转换电路分别转换电压mcu3.3v和s3.3v。
4.如权利要求2所述的一款可以精确控制电机转动位置和角度的电路,其特征在于,所述磁编码器u6的引脚2与微控制器u2的15连接,引脚3与微控制器u2的引脚11连接,微控制器u2的引脚17串联电阻r13与磁编码器u6的引脚4连接,磁编码器u6的引脚4与电阻r13之间连接微控制器u2的引脚16,电阻r13为360欧。
5.如权利要求2所述的一款可以精确控制电机转动位置和角度的电路,其特征在于,所述微控制器u2的引脚24连接mcu3.3v,微控制器u2的引脚23接地。
6.如权利要求5所述的一款可以精确控制电机转动位置和角度的电路,其特征在于,所述485收发器u1的引脚1和微控制器u2的引脚35之间连接电阻r2且电阻r2的一端连接s3.3v,485收发器u3的引脚1和微控制器u2的引脚41之间连接电阻r7且电阻r7的一端连接s3.3v,485收发器u4的引脚1和微控制器u2的引脚29之间连接电阻r11且电阻r11的一端连接s3.3v,r2、r7和r11均为10千欧。
技术总结本申请涉及电机控制技术领域,尤其涉及一款可以精确控制电机转动位置和角度的电路,它包括主控模块、485通信模块、电源的输入模块和磁编码模块,所述电源的输入模块向主控模块供电,所述485通信模块和磁编码模块均与主控模块连接,所述电源的输入模块包括型号为78L33的稳压芯片U5,所述485通信模块包括型号为TP8485E的485收发器U1、U3、U4,所述主控模块包括型号为N32G430C8L7的微控制器U2,所述磁编码模块包括型号为VCE2755的磁编码器U6;利用磁编码器和三组485收发器与微控制器连接,实现了电机位置的精确角度和精确位置控制。技术研发人员:蒋云松受保护的技术使用者:常州云森智能科技有限公司技术研发日:20231124技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240720/269406.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表