一种多旋翼飞行器升力与扭矩的测量装置
- 国知局
- 2024-08-01 05:26:37
本发明涉及飞行器的测试,具体涉及一种多旋翼飞行器升力与扭矩的测量装置。
背景技术:
1、随着无人机领域的快速发展,空中城市交通的开发将成为新世纪的关键领域,国内外目前正在发展的电动垂直起降飞行器(evtol),大多都是以倾转多旋翼构型来研制和开发的。作为现在国内外的研究热点,分布式多旋翼升力+倾转旋翼技术显得尤为重要。倾转旋翼技术,可以使现有的无人机在复杂的城市建筑中平稳地垂直起降,无需跑道。分布式多旋翼升力可以使飞行器在飞行过程中保持稳定的飞行姿态,控制技术成熟。分布式多旋翼升力+倾转旋翼技术应用于飞行器上,首先要解决的就是倾转过程气动力的测量,并探究倾转策略,通过不断的试验测试,使得倾转过程中气动干扰最小,倾转效率最高,并获得很好的气动效率,进一步对飞行控制器的设计提供气动数据。现有的多旋翼和倾转旋翼测力系统,大多只有单一功能,要么只能进行单个/单组旋翼的动力测试能力,要么只具备单个倾转旋翼的测量方法,不具备对分布式多倾转旋翼的综合测力能力,也不具备对多个倾转旋翼的倾转策略进行测试的能力。
技术实现思路
1、本发明针对现有技术中存在的问题,提出一种多旋翼飞行器升力与扭矩的测量装置,用以解决目前对倾转旋翼类飞行器试验测试过程中,仅分布测量部分旋翼力和力矩,在测量的过程中可随时进行旋翼组件状态的调整,提高试验效率,可实时规划出倾转策略,当不倾转时,可用于对常规多旋翼构型进行气动力测量。
2、本发明所采用的技术方案是:一种多旋翼飞行器升力与扭矩的测量装置,包括架体,架体上转动安装有若干个旋翼组件,旋翼组件包括旋翼,旋翼固定安装在第一电机的输出轴上,第一电机固定在第一扭矩传感器的转动端,第一扭矩传感器固定在第一压力传感器上,第一压力传感器固定在倾转数字舵机的机壳上,机壳上转动安装有连接轴,连接轴固定在底座上,与连接轴固定连接的从动轮传动连接倾转数字舵机输出轴上的主动轮。
3、在上述方案的基础上,作为优选,架体包括纵杆以及固定在纵杆上的若干个横杆,每个横杆的端部固定从动轮,连接轴与横杆之间固定连接。
4、在上述方案的基础上,作为优选,纵杆的两侧均固定安装三个横杆。
5、在上述方案的基础上,作为优选,横杆为伸缩杆。
6、在上述方案的基础上,作为优选,横杆距离倾转数字舵机远的一端呈y型并通过螺栓固定在过渡件上,过渡件固定在过渡横杆上。
7、在上述方案的基础上,作为优选,纵杆固定在第二扭矩传感器上,第二扭矩传感器固定在第二压力传感器上,第二压力传感器固定在控制箱上,控制箱固定在连接臂上端,连接臂下端固定连接第二电机的输出轴,第二电机固定在弯臂上端,弯臂下端传动连接底座电机的输出轴,底座电机固定在底座上。
8、在上述方案的基础上,作为优选,坐标系转换方法:
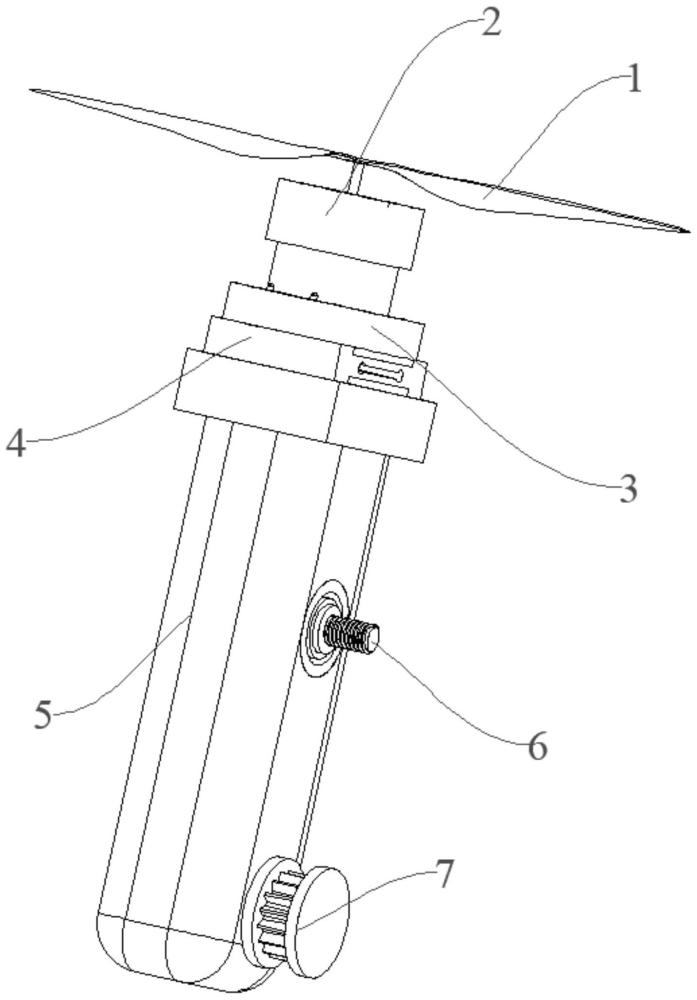
9、旋翼在空间中的位姿可以用固定于倾转数字舵机上任一点的坐标系来表示,以底座的中心为坐标原点o,根据右手螺旋法则,设{o:x0,y0,z0}为固定于地面上的固定坐标系;以倾转数字舵机的中心为坐标原点o',根据右手螺旋法则,设{o':x1,y1,z1}为固定于倾转数字舵机的上的动坐标系,且坐标系{o':x1,y1,z1}是由坐标系{o:x0,y0,z0}经过平移所得到的。如图1标注所示,i,j,k是坐标系{o:x0,y0,z0}对应坐标轴上的单位矢量,ib,jb,kb是坐标系{o':x1,y1,z1}对应坐标轴上的单位矢量,物体在空间的位置可以用动坐标系的原点o'相对于固定坐标系的位置来表示,即
10、x为3×1的列矢量
11、旋翼在空间的姿态可以用动坐标系三个坐标轴上的单位矢量ib,jb,kb相对于固定坐标系的方向余弦来表示,用矩阵的形式表示,即
12、
13、整理后得
14、式中:i·ib表示xb轴与x轴两单位矢量之间的内积,也即方向余弦,令
15、此时
16、与现有技术相比,本发明具有以下有益效果:
17、第一、本发明设置了6个旋翼来进行测量,可测得对称矩阵排布下旋翼产生的升力及扭矩力。以旋转轴中心为轴线,单个旋翼组件分布有扭矩传感器、压力传感器,用于测量旋翼受到的气动力。单个旋翼测量装置如图1。
18、第二、倾转装置可模拟飞行器不同的飞行姿态,可以测量旋翼在不同倾转角度下性能的装置。通过倾转数字舵机转动同步小带轮,利用反作用力可使单个测量装置在y-z平面内进行0°至90°倾转,用于模拟飞行器的平飞姿态和俯仰姿态,倾转过程如图2、3、4。通过变结构数字舵机10转动支架,以及支架的伸缩变距功能可改变多个旋翼的前后间距、左右间距,如图6。通过3自由度机器人臂的转动,可使6个旋翼装置同时倾斜,如图5。
19、第三、每个旋翼下方单独装配了一个扭矩传感器加上一个压力传感器,可测得单个旋翼所产生的扭矩力及拉力,在变结构支座下方设有一个总压力传感器13,可测得6个旋翼同时工作时的拉力,在变结构支座下方还设有一个总扭矩传感器,可测得6个旋翼同时工作时的总扭矩。
20、第四、装置中间的信号采集箱可实时监测收集旋翼各方向的气动力、反扭矩和倾转力矩。周期变距角、总距角、倾转角度、偏航角度和俯仰角度等通过舵机标定计算获得。通过舵机转动设定各个旋翼机构的位置关系,可直接调整各个旋翼机构之间的相对位置,与传统手动调整方法相比,可实现各个旋翼机构位置的全自动控制,更加方便,提高了工作效率。
21、第五、旋翼的倾转方式选用同步带轮传动,具有缓冲吸振,传递平稳,噪音小,相比v带精度高,相比链轮噪音小,相比齿轮传动距离远的优点。。
技术特征:1.一种多旋翼飞行器升力与扭矩的测量装置,其特征在于,包括架体,架体上转动安装有若干个旋翼组件,旋翼组件包括旋翼,旋翼固定安装在第一电机的输出轴上,第一电机固定在第一扭矩传感器的转动端,第一扭矩传感器固定在第一压力传感器上,第一压力传感器固定在倾转数字舵机的机壳上,机壳上转动安装有连接轴,连接轴固定在底座上,与连接轴固定连接的从动轮传动连接倾转数字舵机输出轴上的主动轮。
2.如权利要求1所述的多旋翼飞行器升力与扭矩的测量装置,其特征在于,架体包括纵杆以及固定在纵杆上的若干个横杆,每个横杆的端部固定从动轮,连接轴与横杆之间固定连接。
3.如权利要求2所述的多旋翼飞行器升力与扭矩的测量装置,其特征在于,纵杆的两侧均固定安装三个横杆。
4.如权利要求2所述的多旋翼飞行器升力与扭矩的测量装置,其特征在于,横杆为伸缩杆。
5.如权利要求2所述的多旋翼飞行器升力与扭矩的测量装置,其特征在于,横杆距离倾转数字舵机远的一端呈y型并通过螺栓固定在过渡件上,过渡件固定在过渡横杆上。
6.如权利要求2所述的多旋翼飞行器升力与扭矩的测量装置,其特征在于,纵杆固定在第二扭矩传感器上,第二扭矩传感器固定在第二压力传感器上,第二压力传感器固定在控制箱上,控制箱固定在连接臂上端,连接臂下端固定连接第二电机的输出轴,第二电机固定在弯臂上端,弯臂下端传动连接底座电机的输出轴,底座电机固定在底座上。
7.如权利要求2所述的多旋翼飞行器升力与扭矩的测量装置,其特征在于,
技术总结本发明公开了一种多旋翼飞行器升力与扭矩的测量装置,包括架体,架体上转动安装有若干个旋翼组件,旋翼组件包括旋翼,旋翼固定安装在第一电机的输出轴上,第一电机固定在第一扭矩传感器的转动端,第一扭矩传感器固定在第一压力传感器上,第一压力传感器固定在倾转数字舵机的机壳上,机壳上转动安装有连接轴,连接轴固定在底座上,与连接轴固定连接的从动轮传动连接倾转数字舵机输出轴上的主动轮。用以解决目前对倾转旋翼类飞行器试验测试过程中,仅分布测量部分旋翼力和力矩,在测量的过程中可随时进行旋翼组件状态的调整,提高试验效率,可实时规划出倾转策略,当不倾转时,可用于对常规多旋翼构型进行气动力测量。技术研发人员:孔德力,杜思亮,李琛,查逸受保护的技术使用者:淮阴工学院技术研发日:技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219779.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。