一种智能喷涂清洗无人机的制作方法
- 国知局
- 2024-08-01 05:35:18
本发明涉及无人机,尤其涉及一种智能喷涂清洗无人机。
背景技术:
1、人们的物质生活水平逐渐提高,高层住宅也成为生活所需。建筑物外墙面喷涂涂料多采用人工作业,劳动强度大,风险高,效率低。涂料雾滴对喷涂工人身体有害,长期从事外墙喷涂作业可能会产生呼吸系统职业疾病。能在高层建筑上喷涂的外墙喷涂无人机应运而生。
2、中国专利授权公告号:cn116443777b公开了一种带有机械臂的智能喷涂无人机,具备:机架,包括机架本体和六个旋翼组件,在机架本体上方设置有喷涂装置,在机架本体下方设置有环形支架,在旋翼组件的外侧设置有圆环形保险杠;喷涂调节装置,包括机械臂和用于安装机械臂的旋转平台,所述旋转平台包括固定底座、平台电机和转盘,在机架本体和转盘上对应形成有上下对应的弧形穿孔;本装置将机械臂技术和无人机技术进行有效结合,在无人机上部装有五自由度机械臂,并在机械臂下部固定涂料输送管,机械臂末端喷枪与涂料输送管连通,可在空中对复杂结构进行喷涂、清洗等工作。不仅能够减少涂料喷涂过程中的浪费,而且避免了操作人员高空作业,有效保证了其人身安全。
3、但是,上述装置存在以下问题:对于连续直线型喷涂工作,由于无人机稳定性的限制,不能连续稳定喷涂。
技术实现思路
1、为此,本发明提供一种智能喷涂清洗无人机,用以克服现有技术中缺乏对于连续直线型喷涂工作,由于无人机稳定性的限制,不能连续稳定喷涂,进而导致喷涂效果较差的问题。
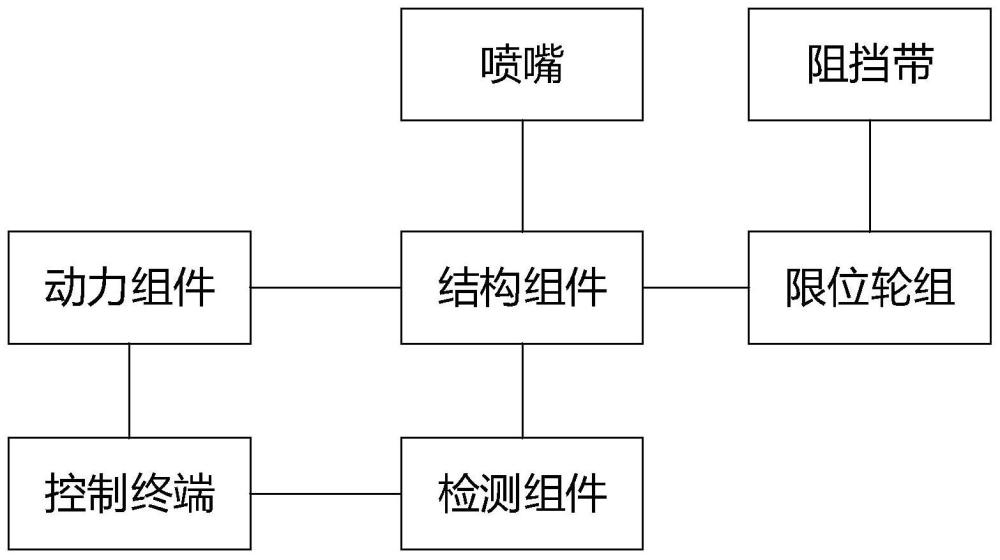
2、为实现上述目的,本发明提供一种智能喷涂清洗无人机,包括:
3、动力组件,用以为所述无人机提供动力;
4、喷嘴,用以向喷涂面喷涂对应涂料;
5、结构组件,其用以为所述动力组件和所述喷嘴提供结构支撑;
6、限位轮组,其包括设置于所述结构组件一端的两个对称设置的滚轮,所述滚轮随所述无人机的升降在所述喷涂面上滚动;
7、检测组件,其包括设置于所述结构组件的所述限位轮组端的两个对称设置的距离传感器,以及用以采集所述喷涂面的图像的摄像头;
8、阻挡带,其缠绕于所述滚轮外侧,且阻挡带朝向滚轮外侧的一面能够粘附于所述喷涂面;
9、控制终端,其分别与所述动力组件和所述检测组件连接,用以根据所述喷涂面的图像确定粘附于所述喷涂面上的阻挡带是否起皱,根据所述距离传感器的距离差判定起皱原因为无人机位置偏移或无人机的起升速度不符合标准,并在无人机的起升速度不符合标准时对无人机的起升速度进行调节;
10、其中所述距离差为两个距离传感器与喷涂面的距离之差的绝对值。
11、进一步地,所述控制终端设置有所述无人机的喷涂进程,在单个喷涂进程中,所述控制终端控制所述无人机在喷涂状态下起升;
12、所述喷涂状态为所述阻挡带朝向滚轮外侧的一面与所述喷涂面接触。
13、进一步地,在所述喷涂进程中,两滚轮对应的阻挡带粘附于所述喷涂面,所述喷嘴向两阻挡带粘附部分之间的区域喷涂对应涂料。
14、进一步地,所述控制终端在所述无人机的单个喷涂进程结束后,控制所述无人机沿起升路径回落,所述阻挡带随滚轮的回转缠绕在滚轮外侧并脱离所述喷涂面。
15、进一步地,所述控制终端在所述无人机的单个喷涂进程中,通过所述摄像头检测所述阻挡带的粘附部分是否起皱;若起皱,控制无人机回落并根据两个距离传感器的距离差确定起皱原因。
16、进一步地,所述控制终端响应于第一条件判定起皱原因为无人机位置偏移;
17、所述第一条件满足所述距离差大于预设阈值。
18、进一步地,所述控制终端响应于第二条件判定起皱原因为所述无人机的起升速度不符合标准;
19、所述第二条件满足所述距离差小于等于所述预设阈值。
20、进一步地,所述控制终端在所述第二条件下根据阻挡带的凸起量对下一喷涂进程中所述无人机的起升速度进行减小调节。
21、进一步地,所述结构组件包括对称安装的两组支架,两组支架之间安装有横梁,横梁上安装有载板,载板左右两侧连接有折叠杆,两侧折叠杆均连接有臂杆,两根臂杆均安装有两个基座和两个用以保护桨叶的保护罩,两根臂杆端部一并连接有u型架;
22、所述动力组件包括安装在各基座上的电机、安装在电机的输出端的桨叶以及安装在所述载板上的电池。
23、进一步地,所述喷嘴安装于所述u型架的中心位置,u型架两侧安装所述距离传感器,u型架安装有两个用以安装所述滚轮的转速支架;
24、其中,两个滚轮外径尺寸相同,两个滚轮的轴心线处于同一直线上。
25、与现有技术相比,本发明的有益效果在于,通过设置限位轮组使无人机能够保持与喷涂面间的距离,喷涂距离的稳定能够保证喷涂的均匀性,且在滚轮外侧设置的阻挡带能够防止涂料喷涂到多余区域,能够实现对目标喷涂区域的精准控制,进而有效提高了喷涂效果。
26、进一步地,本发明限位轮组同时实现无人机的移动、喷涂距离的控制和阻挡带的粘贴和收卷,相比于传统喷涂无人机,本发明通过限位轮组的简单结构实现了喷涂的精准控制,进一步提高了喷涂效果。
27、进一步地,本发明通过对阻挡带起皱的检测,若起皱会导致阻挡带形成的喷涂区域变形,对起皱的检测避免了阻挡带偏移对喷涂效果的影响,进一步提高了喷涂效果。
28、进一步地,本发明通过两个距离传感器的位移差判定起皱原因,两个距离传感器与喷涂面的距离若相差较大,即说明无人机的位置存在歪斜,进而导致了阻挡带起皱,两个距离传感器与喷涂面的距离若相差较小,即说明无人机的位置不是起皱原因,无人机的起升速度过快会导致阻挡带粘附效果差,局部的粘附松动并受到重力的影响进而导致阻挡带起皱,通过控制终端对无人机的起升速度进行调节,能够有效避免起皱现象,进一步提高了喷涂效果。
技术特征:1.一种智能喷涂清洗无人机,其特征在于,包括;
2.根据权利要求1所述的智能喷涂清洗无人机,其特征在于,所述控制终端设置有所述无人机的喷涂进程,在单个喷涂进程中,所述控制终端控制所述无人机在喷涂状态下起升;
3.根据权利要求2所述的智能喷涂清洗无人机,其特征在于,在所述喷涂进程中,两滚轮对应的阻挡带粘附于所述喷涂面,所述喷嘴向两阻挡带粘附部分之间的区域喷涂对应涂料。
4.根据权利要求3所述的智能喷涂清洗无人机,其特征在于,所述控制终端在所述无人机的单个喷涂进程结束后,控制所述无人机沿起升路径回落,所述阻挡带随滚轮的回转缠绕在滚轮外侧并脱离所述喷涂面。
5.根据权利要求4所述的智能喷涂清洗无人机,其特征在于,所述控制终端在所述无人机的单个喷涂进程中,通过所述摄像头检测所述阻挡带的粘附部分是否起皱;若起皱,控制无人机回落并根据两个距离传感器的距离差确定起皱原因。
6.根据权利要求5所述的智能喷涂清洗无人机,其特征在于,所述控制终端响应于第一条件判定起皱原因为无人机位置偏移;
7.根据权利要求6所述的智能喷涂清洗无人机,其特征在于,所述控制终端响应于第二条件判定起皱原因为所述无人机的起升速度不符合标准;
8.根据权利要求7所述的智能喷涂清洗无人机,其特征在于,所述控制终端在所述第二条件下根据阻挡带的凸起量对下一喷涂进程中所述无人机的起升速度进行减小调节。
9.根据权利要求1所述的智能喷涂清洗无人机,其特征在于,所述结构组件包括对称安装的两组支架,两组支架之间安装有横梁,横梁上安装有载板,载板左右两侧连接有折叠杆,两侧折叠杆均连接有臂杆,两根臂杆均安装有两个基座和两个用以保护桨叶的保护罩,两根臂杆端部一并连接有u型架;
10.根据权利要求9所述的智能喷涂清洗无人机,其特征在于,所述喷嘴安装于所述u型架的中心位置,u型架两侧安装所述距离传感器,u型架安装有两个用以安装所述滚轮的转速支架;
技术总结本发明涉及无人机技术领域,尤其涉及一种智能喷涂清洗无人机,包括:动力组件、喷嘴、结构组件、限位轮组、检测组件、阻挡带和控制终端,阻挡带缠绕于滚轮外侧,且阻挡带朝向滚轮外侧的一面能够粘附于所述喷涂面,限位轮组包括设置于结构组件一端的两个对称设置的滚轮,滚轮随无人机的升降在喷涂面上滚动;通过设置限位轮组使无人机能够保持与喷涂面间的距离,喷涂距离的稳定能够保证喷涂的均匀性,且在滚轮外侧设置的阻挡带能够防止涂料喷涂到多余区域,能够实现对目标喷涂区域的精准控制,进而有效提高了喷涂效果。技术研发人员:陈磊,张亮,黄坤耀,叶伟平受保护的技术使用者:央固工程科技(上海)有限公司技术研发日:技术公布日:2024/5/10本文地址:https://www.jishuxx.com/zhuanli/20240722/220554.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表