钢桩台车定位系统监测装置及载荷预警方法
- 国知局
- 2024-08-01 06:39:58
本发明涉及船舶领域,具体地,涉及一种钢桩台车定位系统监测装置及载荷预警方法,尤其地,涉及一种柔性钢桩台车定位系统监测装置与载荷预警方法。
背景技术:
1、大型工程船舶通常设置钢桩台车定位系统来达到精确定位和移位船舶的目的。钢桩台车定位系统通常布置在船艏或船艉端部的台车开槽内,在工作中,首先通过钢桩升降装置将钢桩插入至海床完成定位;进一步利用行走油缸的伸缩来推拉船体进行船舶移位。
2、然而,随着大型工程船舶作业能力的不断提升和作业范围向外海拓展,将面临更加复杂、恶劣的作业环境,施工作业载荷和风、浪、流等外界环境载荷均成倍增加,船舶运动幅度也显著增大。其中,船舶纵摇运动会对钢桩定位系统产生与运动幅度成正比的附加弯矩,当该附加弯矩超过钢桩定位系统承载能力时,将造成钢桩折断等严重安全事故。因此,需要对柔性钢桩台车定位系统进行实时监测,实现钢桩载荷预报和载荷告警,避免钢桩承受过大载荷和疲劳导致的事故发生。但由于钢桩尺寸大,受力位置随船体升沉和纵摇等运动也会不断变化,直接监测较为困难。
3、为解决上述问题,现有技术中例如专利cn 117347151 a公开了一种绞吸船钢桩应力监测系统及方法,基于角度测量装置实现,包括支撑板、测杆、测环和行进装置角度传感器,可实时测量钢桩变形,实现钢桩最大应力及位置识别,提高绞吸船在恶劣海况下的安全性能。但该技术测量方式只有角度,不能对台车整体工作状态进行监测,无法做到载荷预报告警;专利cn 209910708 u和cn 209910709 u分别公开了一种绞吸船和耙吸船的状态监测系统,包括传感器、采集设备以及信号处理装置,解决了在船的状态出现问题时无法及时地发现的问题。能实时地对船的状态进行监测,及时地发现船的状态故障。但该技术仅适用单一船型,监测数据不全面,不能对钢桩和台车整体工作状态进行监测,无法做到载荷预报;专利cn 110085006b公开了一种船舶监测方法、装置、系统和存储介质,包括获取采集设备发送的船机设备的状态信息,处理得到所述船舶的状态表征值;比对所述船舶的状态表征值与预设报警阈值,根据比对结果向所述船舶对应的监测中心发出提示信息。能够避免外界环境和主观因素的影响,监测结果准确;实现了船舶工作状态的实时监测,便于船舶的及时维护,效率高。但该技术方式较为笼统,监测数据不全面,不能对钢桩和台车整体工作状态进行监测,无法做到载荷预报。
4、综上所述,工程上亟需一种对台车的工作状态进行监测的装置及方法,并进行钢桩载荷的预报与载荷告警,提高挖泥船在恶劣海况下的安全性能。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种钢桩台车定位系统监测装置及载荷预警方法。
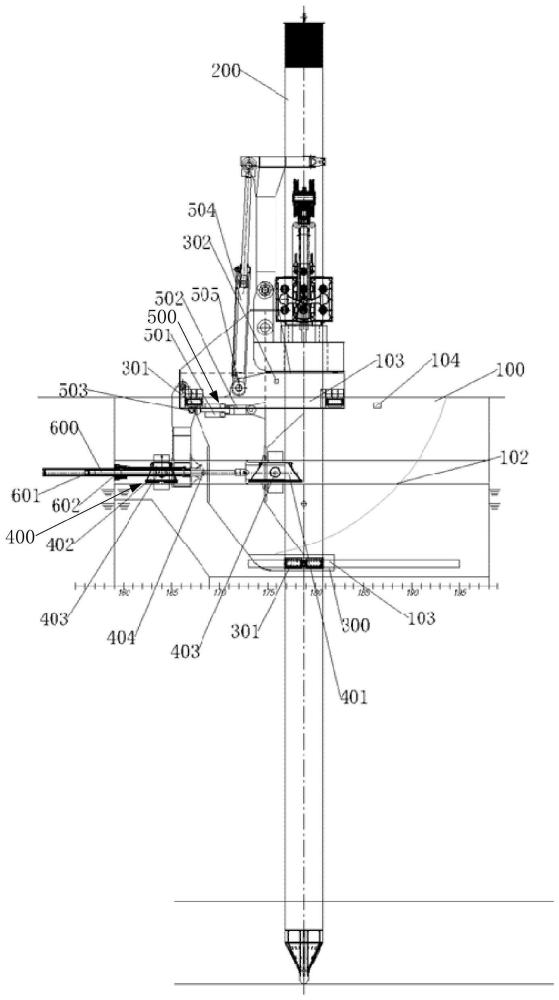
2、根据本发明提供的一种钢桩台车定位系统监测装置,包括船体、钢桩、台车主体结构、台车行进子系统、台车纵摇缓冲子系统、台车行进驱动油缸以及工作状态监测系统;
3、船体上设置有船体开槽结构,所述开槽结构位于所述船体的船艏端部或船艉端部,台车主体结构位于所述开槽结构内;
4、钢桩安装于台车主体结构的贯穿开孔中;船体上安装有行进轨道;
5、台车行进子系统安装在台车主体结构上,且能够在台车行进驱动油缸的作用下沿船体行进轨道滑动或滚动;
6、台车纵摇缓冲子系统安装在台车主体结构上;
7、所述工作状态监测系统包括船体运动监测子系统、台车运动加速度与倾角监测子系统、钢桩载荷监测子系统、钢桩下放深度监测子系统、台车横向载荷监测子系统、台车纵向载荷监测子系统、台车垂向载荷监测子系统、台车行走子系统的载荷监测子系统以及台车缓冲子系统的载荷监测子系统。
8、优选的,所述行进轨道的数量为2个,分别为左行进轨道与右行进轨道,左行进轨道与右行进轨道结构型式相同,均包括上、下两条互相平行的平面结构,所述上、下两条互相平行的平面结构相对船体开槽结构中心线对称布置;
9、船体上还安装有侧向轨道,侧向轨道在当船体与台车主体结构相对滑动时,起到辅助导向和承载的作用;
10、台车主体上布置有上抱箍和下抱箍,上抱箍和下抱箍用于固定钢桩位置,增强其横向与纵向稳定性,不影响其垂向移动。
11、优选的,所述台车行进子系统包括前行走装置和后行走装置;所述前行走装置安装在所述台车主体结构上,后行走装置与台车主体结构铰接连接。
12、优选的,台车纵摇缓冲子系统包括两组结构型式相同的纵摇缓冲装置,所述纵摇缓冲装置为缓冲油缸,所述缓冲油缸安装在台车主体结构上。
13、优选的,台车行进驱动油缸所具有的缸体和活塞杆分别与船体和台车主体结构相连接。
14、优选的,船体运动监测子系统包括船体imu,船体安装台车主体结构的区域布置有船体imu,船体imu能够实时获得船体倾角;
15、台车运动加速度与倾角监测子系统包括台车imu,台车主体结构上布置有台车imu,台车imu用于实时获得台车主体结构加速度与倾角;
16、钢桩载荷监测子系统包括光纤光栅传感器,钢桩内部周向布置光纤光栅传感器,光纤光栅传感器用于钢桩应力监测,周向均匀布置多个测点,高度方向根据预设最大间隔距离布置测点;
17、钢桩下放深度监测子系统包括激光雷达和/或其他距离传感器,所述激光雷达和/或其他距离传感器安装在钢桩上;
18、台车横向载荷监测子系统包括台车压力传感器,台车主体结构与侧向轨道接触处布置有台车压力传感器;
19、台车纵向载荷监测子系统包括行走油缸压力传感器和行走油缸销轴传感器;台车行进驱动油缸上安装有行走油缸压力传感器,台车行进驱动油缸与台车主体结构铰接处布置行走油缸销轴传感器;
20、台车垂向载荷监测子系统包括行进装置销轴传感器,前行走装置销轴处和后行走装置销轴处均布置有行进装置销轴传感器;
21、台车行走子系统的载荷监测子系统包括行进装置角度传感器,后行走装置与台车主体结构铰接处安装行进装置角度传感器,实时获得相对转角;
22、台车缓冲子系统的载荷监测子系统包括缓冲油缸压力传感器、缓冲油缸销轴传感器和倒桩油缸销轴传感器;缓冲油缸压力传感器监测缓冲油缸行程,缓冲油缸销轴传感器监测铰接点受力;倒桩油缸销轴传感器监测台车主体结构上安装的倒桩油缸的铰链轴载荷。
23、优选的,所述工作状态监测系统还包括钢桩载荷预报子系统与载荷告警子系统。
24、根据本发明提供的一种载荷预警方法,采用所述的钢桩台车定位系统监测装置;所述载荷预警方法包括钢桩载荷预报方法与载荷告警方法。
25、优选的,钢桩载荷预报方法包括:
26、步骤100,钢桩桩底载荷反演算法;根据两支点悬臂梁理论或有限元分析方法,基于光纤光栅传感器布置位置,计算不同水深工况下给定或单位载荷下的整根钢桩在测点处的形变位移和应力分布;
27、步骤101,将实际测得的工作水深和测点处的应力与理论计算值作对比,反算得出桩底载荷合力与方向;
28、步骤102,根据土质能够定义一个相关系数alpha,通过alpha乘以插桩深度能够设定桩底载荷作用点位置;
29、步骤200,钢桩桩底载荷实测算法;激光雷达和/或其他距离传感器测得工作水深与钢桩下放深度,台车与侧向轨道接触处的横向压力传感器获得台车横向载荷,行走油缸压力换算得到纵向载荷,前后行走装置销轴处的销轴传感器测量得到垂向载荷,乘以摩擦系数得到台车摩擦力,当已知以上条件,计算得到钢桩桩底载荷合力和方向;
30、步骤201,定义工作水深h1,转轴中心距水面高度h2,钢桩下放深度h3,钢桩的上下抱箍距转轴中心距离分别为l1和l2,通过实测载荷计算得到上下抱箍处受到的横向合力分别为f1x和f2x,根据力矩平衡可得
31、f_spud_x*(h1+h2+alpha*h3)=f1x*l1-f2x*l2
32、即可计算得到钢桩桩底横向载荷合力f_spud_x;
33、同理可得纵向平衡方程,
34、f_spud_y*(h1+h2+alpha*h3)=f1y*l1+f2y*l2;
35、其中f1y、f2y分别为上下抱箍处受到的纵向合力;解得钢桩桩底纵向载荷合力f_spud_y;由此可以得到最终钢桩桩底载荷合力和方向;
36、步骤300,钢桩桩底载荷卡尔曼滤波算法;将步骤100钢桩载荷反演算法中的钢桩计算载荷与步骤200实际测量得到桩底反力进行卡尔曼滤波,得到更加准确的桩底反力和作用方向;
37、步骤400,利用步骤300得到的桩底反力通过两支点悬臂梁理论或有限元分析方法理论计算快速得到上、下抱箍处的钢桩载荷,并将该结果输入到载荷预报子系统;
38、步骤500,载荷预报子系统工作;接收输入的钢桩上、下抱箍处的载荷,对其最大值进行极值拟合,剔除异常点,获得最大可能载荷极值,对钢桩最大载荷进行安全预警;此外,分别提取载荷循环幅值和周期,进行雨流计数,对钢桩疲劳载荷进行安全预警。
39、优选的,载荷告警方法包括:
40、步骤1000,根据各处监测得到的铰接点载荷、钢桩下抱箍处载荷、上抱箍处载荷等载荷信号,对其最大值进行极值拟合,剔除异常点,获得最大可能载荷极值;
41、步骤1001,将最大可能载荷极值与安全阈值进行比较,对系统瞬态响应进行安全预警,判断载荷、角度是否超过阈值、加速度是否超过阈值、油缸行程是否超过阈值、油缸压力是否超过阈值;
42、步骤1002,最大可能载荷极值与安全阈值进行比较,对系统瞬态响应进行安全预警,判断钢桩疲劳寿命是否超过阈值;
43、步骤1003,载荷告警子系统对系统状态超过安全阈值的部件进行告警。
44、与现有技术相比,本发明具有如下的有益效果:
45、1、本发明钢桩台车定位系统监测装置通过采用钢桩内部布置光纤光栅传感器、台车与侧向轨道接触处布置台车压力传感器、行走装置铰接处布置行进装置销轴传感器、船体和台车上布置imu等多种方式,解决了多部件上的传感器载荷、运动以及工作状态监测问题,并且解决了传统监测装置对船体和台车运动姿态和工作情况不清、难以判别工作状态的问题。
46、2、本发明基于上述钢桩台车定位系统监测装置提供了一套钢桩载荷预报方法及一套载荷告警方法;所述钢桩载荷预报方法可实现钢桩最大载荷和疲劳载荷的安全预报,解决了钢桩受力大小方向不清晰、监测预报困难和恶劣海况下的安全性能的问题;载荷告警方法通过系统各部件状态和钢桩疲劳寿命与安全阈值的对比实现安全告警,解决了柔性钢桩台车定位系统各部件与钢桩受载荷情况不清晰、预警困难以及恶劣海况下的安全性能的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224709.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。