一种稳性可控式水上浮箱作业平台、方法及控制系统与流程
- 国知局
- 2024-08-01 06:45:44
本发明涉及工程施工领域,具体涉及一种稳性可控式水上浮箱作业平台、方法及控制系统。
背景技术:
1、目前,工程中时常会出现需要在平面尺寸较小且较深的水域范围内进行施工的场景,如沉井/地连墙隔舱水域内进行槽段墙体凿毛等。为方便施工机械在该水域内施工,通常会制作浮箱式作业平台为施工机械提供工作空间,浮箱作为浮体稳定于水中,由水的浮力支撑浮箱自重与施工机械的荷载。
2、浮箱平台在使用过程中,其上部的荷载大小及荷载位置情况是经常变化的,比如机械的走动,重物的移动等,当浮箱上部的荷载情况相对于浮箱自身的重心产生变化时,就会产生作用于浮箱上相对于荷载变化前的倾覆力矩。同时,荷载的变化也会引起浮箱结构在水中的浮态变化,浮心位置也会发生变化,新状态下,浮力相对于浮箱重心即会产生抗倾覆力矩以帮助浮箱保持平衡状态,当因为荷载大小或位置的变化所引起的倾覆力矩大于浮箱自身所能提供的抵抗力矩时,浮箱就会发生倾斜,若浮箱平台上机械对施工作业平面要求高,则会导致机械无法正常作业,当倾斜较大时,浮箱甚至会发生倾覆,因受制于水域尺寸等客观原因,导致浮箱制造时很难满足其稳性要求。
技术实现思路
1、本申请提供一种稳性可控式水上浮箱作业平台、方法及控制系统,可以解决相关技术中因荷载大小或位置的变化所引起的倾覆力矩大于浮箱自身所能提供的抵抗力矩时,浮箱发生倾斜甚至倾覆的问题。
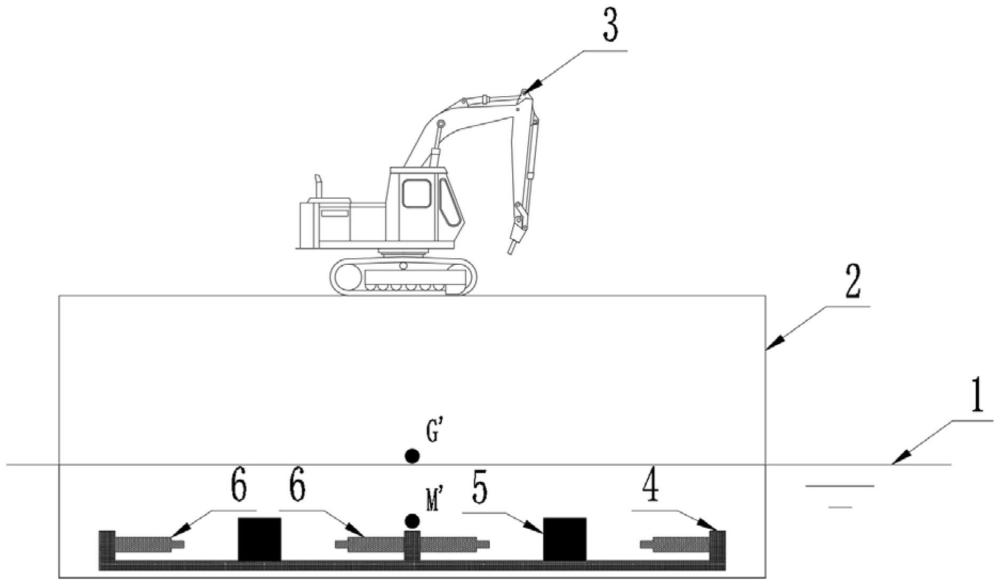
2、第一方面,本申请实施例提供一种稳性可控式水上浮箱作业平台,其包括:浮箱;配重块,其设置于所述浮箱内部;驱动装置,其连接于所述配重块,所述驱动装置可驱动所述配重块移动。
3、结合第一方面,在一种实施方式中,所述配重块有至少两个,两个所述配重块分别位于处于初始平横状态下的浮箱的重心g’的两侧。
4、结合第一方面,在一种实施方式中,所述驱动装置沿水平设置,且沿水平向驱动所述配重块移动。
5、结合第一方面,在一种实施方式中,所述配重块设于所述浮箱的底部。
6、结合第一方面,在一种实施方式中,所述浮箱上设置有传感器,所述传感器与控制装置信号连接,所述控制装置与所述驱动装置信号连接。
7、第二方面,本申请实施例提供了一种稳性可控式水上浮箱作业平台的作业方法,其包括以下步骤:当机械移动距离l时,判断浮箱是否会发生倾覆;若是,则利用驱动装置驱动配重块向与所述机械相反的方向移动。
8、结合第二方面,在一种实施方式中,所述判断浮箱是否会发生倾覆包括:比较所述机械移动距离l时作用于所述浮箱的倾覆力矩m倾覆与浮力作用于所述浮箱的抗倾覆力矩m抗;当所述倾覆力矩m倾覆大于所述抗倾覆力矩m抗时,所述浮箱会发生倾覆;当所述倾覆力矩m倾覆等于所述抗倾覆力矩m抗时,所述浮箱处于倾斜状态,但不会发生倾覆;当所述倾覆力矩m倾覆小于所述抗倾覆力矩m抗时,所述浮箱不会发生倾覆。
9、结合第二方面,在一种实施方式中,所述利用驱动装置驱动配重块向与所述机械相反的方向移动还包括:当所述配重块移动至所述倾覆力矩m倾覆等于所述抗倾覆力矩m抗时,则停止移动。
10、结合第二方面,在一种实施方式中,所述利用驱动装置驱动配重块向与所述机械相反的方向移动包括:利用所述驱动装置驱动两个所述配重块同步移动,并根据所述浮箱的平面姿态情况确定所述配重块的移动距离。
11、第三方面,本申请实施例提供了一种稳性可控式水上浮箱作业平台控制系统,其包括:姿态测量模块,其用于实时获取浮箱的空间姿态数据;数据计算模块,其用于根据所述浮箱的空间姿态数据计算所述浮箱的倾覆力矩m倾覆,并计算配重块需调整的位置;姿态调整模块,其用于根据所述配重块需要调整的位置利用驱动装置调整所述浮箱的重心。
12、本申请实施例提供的技术方案带来的有益效果至少包括:
13、通过在浮箱平台内部设置可调整位置的配重块,当因荷载变化产生作用于浮箱上的倾覆力矩时,通过调整配重块的位置调整浮箱结构的重心,进而增大浮箱的抗倾覆力矩,从而可以维持浮箱的平稳状态,为浮箱上方施工提供稳定的作业平台,解决了相关技术中因荷载变化所引起的倾覆力矩大于浮箱自身所能提供的抵抗力矩时,浮箱发生倾斜甚至倾覆的问题。
技术特征:1.一种稳性可控式水上浮箱作业平台,其特征在于,其包括:
2.如权利要求1所述的稳性可控式水上浮箱作业平台,其特征在于:
3.如权利要求1所述的稳性可控式水上浮箱作业平台,其特征在于:
4.如权利要求1所述的稳性可控式水上浮箱作业平台,其特征在于:
5.如权利要求1所述的稳性可控式水上浮箱作业平台,其特征在于:
6.一种如权利要求1所述的稳性可控式水上浮箱作业平台的作业方法,其特征在于,其包括以下步骤:
7.如权利要求6所述的作业方法,其特征在于,所述判断浮箱(2)是否会发生倾覆包括:
8.如权利要求7所述的作业方法,其特征在于,所述利用驱动装置(6)驱动配重块(5)向与所述施工机械(3)相反的方向移动还包括:
9.如权利要求6所述的作业方法,其特征在于,所述利用驱动装置(6)驱动配重块(5)向与所述施工机械(3)相反的方向移动包括:
10.一种稳性可控式水上浮箱作业平台控制系统,其特征在于,其包括:
技术总结本申请涉及一种稳性可控式水上浮箱作业平台、方法及控制系统,其包括:浮箱;配重块,其设置于所述浮箱内部;驱动装置,其连接于所述配重块,所述驱动装置可驱动所述配重块移动。当因荷载变化产生作用于浮箱上的倾覆力矩时,通过调整配重块的位置调整浮箱结构的重心,进而增大浮箱的抗倾覆力矩,从而可以维持浮箱的平稳状态,为浮箱上方施工提供稳定的作业平台。该稳性可控式水上浮箱作业平台和姿态控制系统结构简单、维护方便、操作灵活、稳定性高、安全可靠,为水域施工提供了便利和安全可靠的保障。技术研发人员:潘昕,潘军,李涵宁,周功建,涂满明,张金杯,何加江,邓玉平,刘亦奇,李奔琦,王瑞,杭正雨,程孝康,王昌鹏受保护的技术使用者:中铁大桥局集团有限公司技术研发日:技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240722/224964.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表