一种水下机器人推进装置的制作方法
- 国知局
- 2024-08-01 06:45:42
本技术涉及水下机器人领域,尤其涉及一种水下机器人推进装置。
背景技术:
1、水下机器人是一种能够在水中执行各种任务的自主或遥控机器人。它们通常被设计用于水下研究、海洋勘测、海底资源开发、海洋科学、潜水作业等应用领域。水下机器人通常具备耐水压、防水密封、高度可靠的特点。它们可以搭载各种传感器和装置,如相机、声呐、激光测距仪等,用于感知和测量水下环境。通过不同的推进装置和机械臂等工具,水下机器人可以实现精确的操作和执行各种任务,减少了人类在水下环境中的风险。
2、水下机器人在水下工作时,为了能进行移动,需要在水下机器人上安装有推进装置,利用推进装置控制水下机器人的移动,但是常规的推进装置都是利用电机带动螺栓扇叶进行驱动,这种推进装置虽然能带动水下机器人移动,但是由于角度不能调节,只能不断的前进,局限性大。
技术实现思路
1、本实用新型的目的在于提供一种水下机器人推进装置,用于解决以下问题。
2、本实用新型为解决上述技术问题,采用以下技术方案来实现:
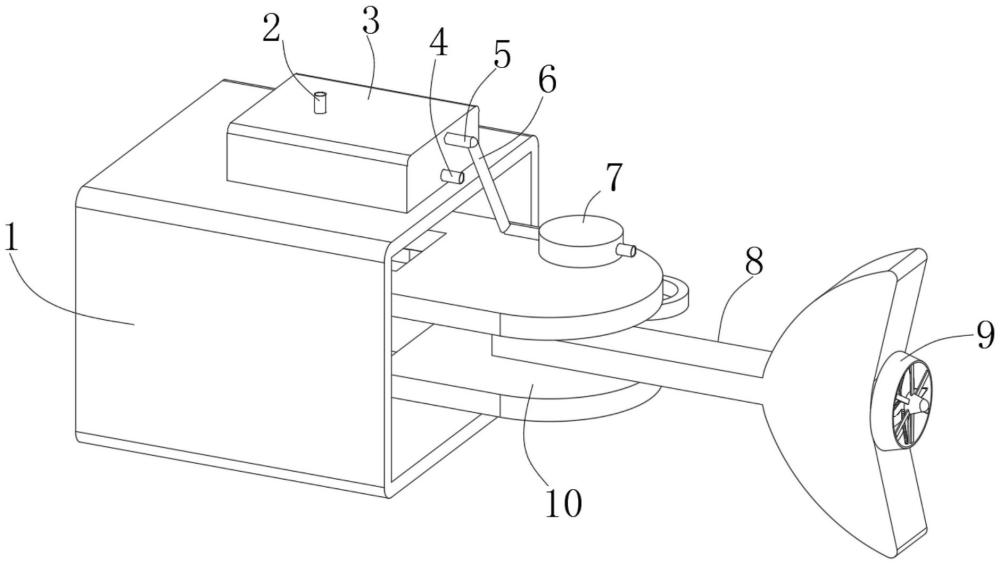
3、一种水下机器人推进装置,包括安装罩,所述安装罩内部转动连接有第一转轴,所述第一转轴上固定连接有安装架,所述安装架内部转动连接有第二转轴,所述第二转轴上固定连接有摆动板,所述第二转轴上固定连接有第二齿轮,所述第二齿轮前方设置有安装环,所述安装环内腔内壁上固定连接有多个第一卡齿,所述第一卡齿上啮合有驱动机构,所述安装环上固定连接有多个第二卡齿,所述第二卡齿与第二齿轮啮合,所述安装环上固定连接有滑杆,所述滑杆上滑动连接有滑套,所述滑套与安装架固定连接。
4、优选的,所述驱动机构包括安装盒,所述安装盒内部固定安装有水泵,所述水泵上安装有第二出水管,所述第二出水管上连接有软管,所述软管上连接有第一空心盒,所述第一空心盒上转动连接有驱动轴,所述第一空心盒内部设置有叶轮,所述叶轮与驱动轴固定连接,所述驱动轴上固定连接有半齿轮,所述半齿轮与第一卡齿啮合。
5、优选的,所述安装盒内部设置有第二空心盒,所述第二空心盒与安装罩固定连接,所述第二空心盒上转动连接有驱动轴,所述第二空心盒内部设置有叶轮,所述叶轮与驱动轴固定连接,所述驱动轴上固定连接有冠齿轮,所述冠齿轮上啮合有第一齿轮,所述第一齿轮上固定连接有往复丝杆,所述往复丝杆与安装罩转动连接,所述往复丝杆上螺纹连接有螺纹板,所述螺纹板与安装罩滑动连接,所述螺纹板上转动连接有转动架,所述转动架与第一转轴固定连接。
6、优选的,所述水泵上固定连接有进水管,所述进水管贯穿安装盒并延伸至安装盒外侧,所述第一出水管与第二出水管的连接处安装有电动混水阀,所述电动混水阀用于切换水泵与第一出水管、第二出水管的连接。
7、优选的,所述摆动板内部开设有安装槽,所述安装槽内安装有推进器。
8、本实用新型的有益效果是:
9、1、本实用新型通过将传统的螺旋叶片转动驱动改为摆动板(尾鳍)推进,能使其很好仿照生物进行驱动,且摆动板的驱动类似生物游行摆动,对水内环境的影响要小于传统的螺旋叶片,能更好的进行驱动水下机器人进行移动,且摆动板上也安装有推进器,可进行辅助驱动。
10、2、通过水泵的驱动,不仅能带动摆动板不断的摆动,进行驱动水下机器人进行移动,而且还能控制安装架上下转动,从而使安装架带动摆动板上下转动,这样摆动板所作用的方向会发生改变,能根据需求进行调节驱动前行的路径。
技术特征:1.一种水下机器人推进装置,包括安装罩(1)、第一出水管(4),其特征在于:所述安装罩(1)内部转动连接有第一转轴(16),所述第一转轴(16)上固定连接有安装架(10),所述安装架(10)内部转动连接有第二转轴(28),所述第二转轴(28)上固定连接有摆动板(8),所述第二转轴(28)上固定连接有第二齿轮(27),所述第二齿轮(27)前方设置有安装环(21),所述安装环(21)内腔内壁上固定连接有多个第一卡齿(25),所述第一卡齿(25)上啮合有驱动机构,所述安装环(21)上固定连接有多个第二卡齿(26),所述第二卡齿(26)与第二齿轮(27)啮合,所述安装环(21)上固定连接有滑杆(19),所述滑杆(19)上滑动连接有滑套(20),所述滑套(20)与安装架(10)固定连接。
2.根据权利要求1所述的水下机器人推进装置,其特征在于:所述驱动机构包括安装盒(3),所述安装盒(3)内部固定安装有水泵(12),所述水泵(12)上安装有第二出水管(5),所述第二出水管(5)上连接有软管(6),所述软管(6)上连接有第一空心盒(7),所述第一空心盒(7)上转动连接有驱动轴(22),所述第一空心盒(7)内部设置有叶轮(23),所述叶轮(23)与驱动轴(22)固定连接,所述驱动轴(22)上固定连接有半齿轮(24),所述半齿轮(24)与第一卡齿(25)啮合。
3.根据权利要求2所述的水下机器人推进装置,其特征在于:所述安装盒(3)内部设置有第二空心盒(13),所述第二空心盒(13)与安装罩(1)固定连接,所述第二空心盒(13)上转动连接有驱动轴(22),所述第二空心盒(13)内部设置有叶轮(23),所述叶轮(23)与驱动轴(22)固定连接,所述驱动轴(22)上固定连接有冠齿轮(14),所述冠齿轮(14)上啮合有第一齿轮(15),所述第一齿轮(15)上固定连接有往复丝杆(18),所述往复丝杆(18)与安装罩(1)转动连接,所述往复丝杆(18)上螺纹连接有螺纹板(11),所述螺纹板(11)与安装罩(1)滑动连接,所述螺纹板(11)上转动连接有转动架(17),所述转动架(17)与第一转轴(16)固定连接。
4.根据权利要求2所述的水下机器人推进装置,其特征在于:所述水泵(12)上固定连接有进水管(2),所述进水管(2)贯穿安装盒(3)并延伸至安装盒(3)外侧,所述第一出水管(4)与第二出水管(5)的连接处安装有电动混水阀,所述电动混水阀用于切换水泵(12)与第一出水管(4)、第二出水管(5)的连接。
5.根据权利要求1所述的水下机器人推进装置,其特征在于:所述摆动板(8)内部开设有安装槽,所述安装槽内安装有推进器(9)。
技术总结本技术公开了一种水下机器人推进装置,包括安装罩,安装罩内有第一转轴,第一转轴上连接有安装架,安装架内有第二转轴,第二转轴上连接有摆动板,第二转轴上连接有第二齿轮,第二齿轮前方设有安装环,安装环内有第一卡齿,第一卡齿上啮合有驱动机构,安装环上固定连接有多个第二卡齿,第二卡齿与第二齿轮啮合,安装环上固定连接有滑杆,滑杆上滑动连接有滑套,滑套与安装架固定连接,通过将传统的螺旋叶片转动驱动改为摆动板(尾鳍)推进,能使其很好仿照生物进行驱动,且摆动板的驱动类似生物游行摆动,对水内环境的影响要小于传统的螺旋叶片,能更好的进行驱动水下机器人进行移动,且摆动板上也安装有推进器,可进行辅助驱动。技术研发人员:张学军,刘笑昆,孙杰林受保护的技术使用者:威海多鱼海洋科技有限公司技术研发日:20231007技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240722/224961.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表