一种斗轮机全自动控制系统的制作方法
- 国知局
- 2024-08-01 04:42:04
本技术涉及燃煤发电,特别涉及一种斗轮机全自动控制系统。
背景技术:
1、随着现代化科学技术水平的不断提升,数字化煤场管理系统逐渐成为当今火电企业煤场管理需求与现代化技术发展有效融合的产物。智能操作系统可以有效的缩减劳动力,精确捕捉故障点,提高维护效率。科学指导采购和掺烧,实现高效生产经营,赢得更大的经济效益。
2、斗轮堆取料机,是一种用于大型堆场连续输送的高效装卸机械。由可俯仰和水平摆动的输送臂及其前端的斗轮、运行机构组成。最初的煤厂建设都是由人为就地进行区域分配,对各层面储存进行统计分析,斗轮堆取料司机根据实际经验现场操作,实现掺烧来降低燃料成本。在斗轮机生产运行的过程中,由于司机室的视野只能看见前方150°的范围,盲区多,容易导致操作失误。煤厂范围大,夜间作业视野受到限制极易造成斗轮机故障,严重时还会出现人员伤亡,所以需要派更多的人员定时定点对设备及现场进行巡视。加上抢煤期间,煤厂各处都有人员及车辆,一个不小心就会出现事故,亟待解决。
技术实现思路
1、本实用新型的目的在于提供一种斗轮机全自动控制系统,以解决上述背景技术中提出的问题。
2、为解决上述问题,本实用新型所采取的技术方案如下:
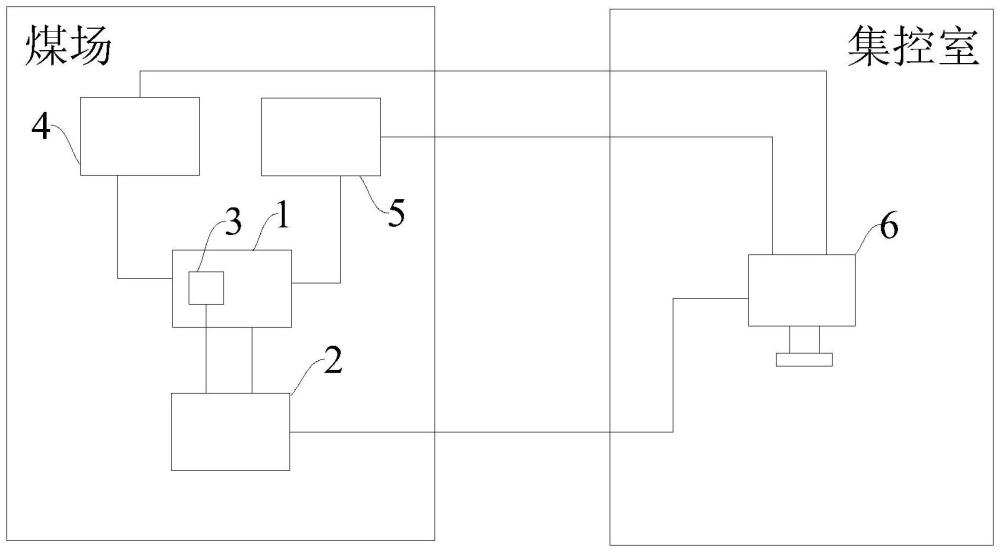
3、一种斗轮机全自动控制系统,包括斗轮机本体、斗轮机全自动控制系统plc、定位器、激光扫描仪、智能监控设备以及上位机;
4、所述斗轮机本体活动安装于煤场轨道上,且通过斗轮机全自动控制系统plc控制连接;
5、所述斗轮机全自动控制系统plc安装于斗轮机本体控制室内;
6、所述定位器设置于斗轮机本体上,且与斗轮机全自动控制系统plc通讯连接;
7、所述激光扫描仪以及智能监控设备均安装于斗轮机本体顶部,且均与上位机通信连接;
8、所述上位机设置于集控室内,且与斗轮机全自动控制系统plc通信连接。
9、优选的,所述定位器由三个编码器组成。
10、优选的,所述智能监控设备由个半固定摄像机、个室内半球摄像机以及个一体化云台摄像机组成。
11、优选的,所述一体化云台摄像机安装在斗轮机本体至高点。
12、优选的,所述上位机为斗轮机全自动控制系统plc智能管控终端。
13、本实用新型与现有技术相比较,具有以下有益效果:
14、本实用新型斗轮机智能自动无线控制系统以煤场信息实时掌握为目标,应用三维仿真建模、激光扫描、定位、数据叠加等技术,进行煤场进、耗、存煤的量、质、价等信息精细化管理,提供全面感知煤场信息、优化煤场储煤结构、动态模拟煤场实景、智能控制设备作业、监测预警煤场安全等功能。
15、本实用新型能够实现精益化管理,有助于适应市场变化科学掺烧降低燃料成本,并且降低设备电能消耗,提高电厂经济效益和市场竞争力,最终实现更安全、更高效、用人更少、更绿色、更盈利的智能化管理系统。
16、本实用新型根据原有控制plc增加无线传输功能,实现人员在集控室就可操作斗轮机进行堆取料,操作简单;在本体设备上设置多达13个摄像头,智能切换全方位无死角,在保留原有操作系统的同时,实现三种操作模式任意切换;利用激光扫描仪,可以通过智能算法和快速的模型建立,直观的看到煤场情况,加上自动逻辑控制,上煤无需多余操作。
17、本实用新型斗轮机全自动控制系统使用了三维建模激光成像技术、大数据分析技术、智能算法、智能控制、智能安全防护、总线通讯控制等多项先进技术,将堆取料机全自动化作业、煤场环境在线监测、自动配煤融合在一起,打造了真正意义上的智能化煤场,实现了真正意义上的堆取料机全自动无人值守作业,对位精度与作业精度都达到了较高水平。
技术特征:1.一种斗轮机全自动控制系统,其特征在于:包括斗轮机本体(1)、斗轮机全自动控制系统plc(2)、定位器(3)、激光扫描仪(4)、智能监控设备(5)以及上位机(6);
2.根据权利要求1所述的一种斗轮机全自动控制系统,其特征在于:所述定位器(3)由三个编码器组成。
3.根据权利要求1所述的一种斗轮机全自动控制系统,其特征在于:所述智能监控设备(5)由7个半固定摄像机、3个室内半球摄像机以及1个一体化云台摄像机组成。
4.根据权利要求3所述的一种斗轮机全自动控制系统,其特征在于:所述一体化云台摄像机安装在斗轮机本体(1)至高点。
5.根据权利要求1所述的一种斗轮机全自动控制系统,其特征在于:所述上位机(6)为斗轮机全自动控制系统plc(2)智能管控终端。
技术总结本技术公开了一种斗轮机全自动控制系统,涉及燃煤发电技术领域,本技术包括斗轮机本体、斗轮机全自动控制系统PLC、定位器、激光扫描仪、智能监控设备以及上位机;定位器设置于斗轮机本体上,且与斗轮机全自动控制系统PLC通讯连接。本技术一种斗轮机全自动控制系统,斗轮机全自动控制系统使用了三维建模激光成像技术、大数据分析技术、智能算法、智能控制、智能安全防护、总线通讯控制等多项先进技术,将堆取料机全自动化作业、煤场环境在线监测、自动配煤融合在一起,打造了真正意义上的智能化煤场,实现了真正意义上的堆取料机全自动无人值守作业,对位精度与作业精度都达到了较高水平。技术研发人员:郝轰宇,李垚受保护的技术使用者:郝轰宇技术研发日:20230922技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/216616.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表