一种拆垛方法、系统、装置、设备以及存储介质与流程
- 国知局
- 2024-08-01 04:52:41
本申请涉及机器人,特别是涉及一种拆垛方法、系统、装置、设备以及存储介质。
背景技术:
1、在物流场景中,为保证各个包裹被准确的送往目的地,需要对包裹进行分拣。然而包裹集散地每天有大量包裹需要分拣,为提高分拣效率、节省人力成本,一般由叉车将包裹垒放形成的货垛运输至分拣设备附近,然后机械臂将货垛中的包裹一个一个的取下,放到分拣设备上进行分拣。
2、上述机械臂取下货垛中的包裹并放到分拣设备上的过程称为拆垛。
3、由于上述拆垛方式中机械臂是一个包裹一个包裹取下,拆垛效率低下,尤其是货垛中包裹较多的情况下,拆垛效率更低。
技术实现思路
1、本申请实施例的目的在于提供一种拆垛方法、系统、装置、设备以及存储介质,以提高拆垛效率。具体技术方案如下:
2、第一方面,本申请实施例提供了一种拆垛方法,所述方法包括:
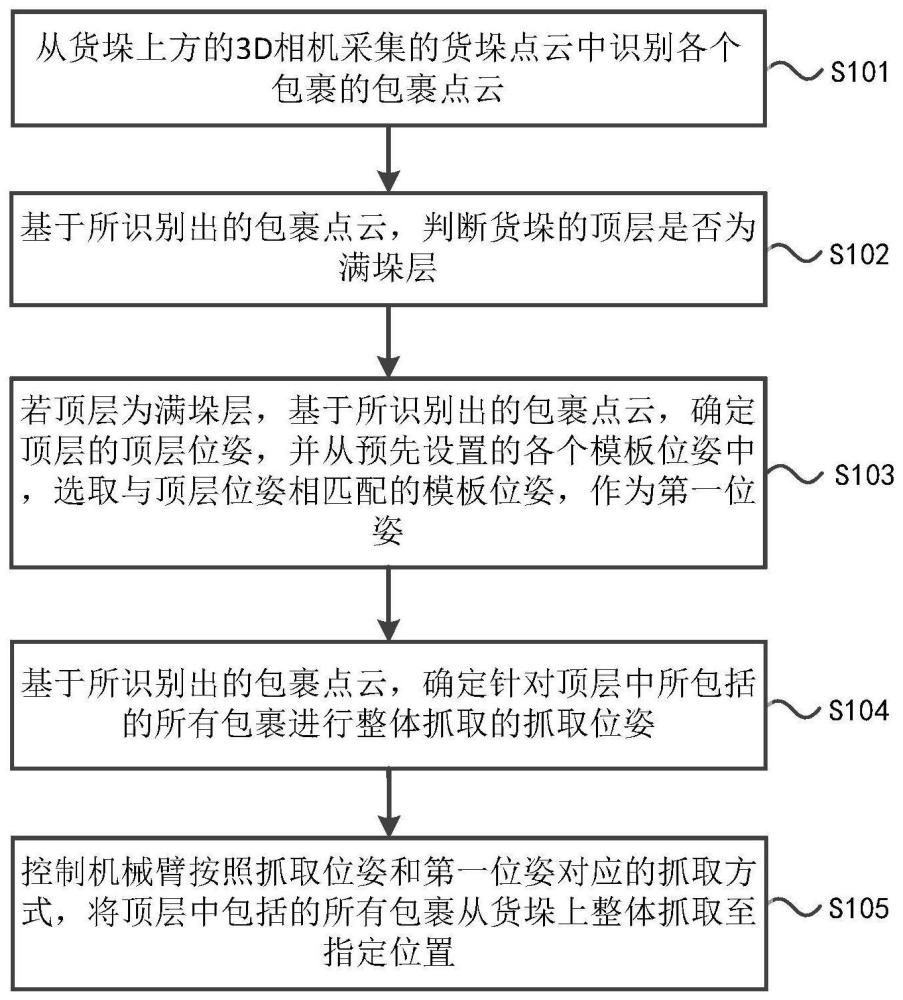
3、从货垛上方的3d相机采集的货垛点云中识别各个包裹的包裹点云;
4、基于所识别出的包裹点云,判断所述货垛的顶层是否为满垛层;
5、若所述顶层为满垛层,基于所识别出的包裹点云,确定所述顶层的顶层位姿,并从预先设置的各个模板位姿中,选取与所述顶层位姿相匹配的模板位姿,作为第一位姿;其中,所述顶层位姿包括所述顶层中所包括各个包裹的位姿数据;每一模板位姿与满垛层中包裹的一种排布方式相对应,且每一模板位姿对应有预设的抓取方式,所述模板位姿包括满垛层中所包括各个包裹的位姿数据;
6、基于所识别出的包裹点云,确定针对所述顶层中所包括的所有包裹进行整体抓取的抓取位姿;
7、控制机械臂按照所述抓取位姿和所述第一位姿对应的抓取方式,将所述顶层中包括的所有包裹从所述货垛上整体抓取至指定位置。
8、第二方面,本申请实施例提供了一种拆垛系统,包括3d相机、控制设备和机械臂;
9、所述3d相机,用于采集位于其下方视野范围内的货垛的货垛点云;
10、所述控制设备,用于从所述3d相机采集的货垛点云中识别各个包裹的包裹点云;基于所识别出的各个包裹的包裹点云,判断所述货垛的顶层是否为满垛层;若所述顶层为满垛层,基于所识别出的包裹点云,确定所述顶层的顶层位姿,并从预先设置的各个模板位姿中,选取与所述顶层位姿相匹配的模板位姿,作为第一位姿;基于所识别出的包裹点云,确定针对所述顶层中所包括的所有包裹进行整体抓取的抓取位姿;其中,所述顶层位姿包括所述顶层中所包括各个包裹的位姿数据;每一模板位姿与满垛层中包裹的一种排布方式相对应,且每一模板位姿对应有预设的抓取方式,所述模板位姿包括满垛层中所包括各个包裹的位姿数据;
11、所述机械臂,用于按照所述控制设备确定的抓取位姿和所述第一位姿对应的抓取方式,将所述顶层中所包括的所有包裹从所述货垛上整体抓取至指定位置。
12、第三方面,本申请实施例提供了一种拆垛装置,所述装置包括:
13、识别模块,用于从货垛上方的3d相机采集的货垛点云中识别各个包裹的包裹点云;
14、判断模块,用于基于所识别出的包裹点云,判断所述货垛的顶层是否为满垛层;
15、选取模块,用于若所述顶层为满垛层,基于所识别出的包裹点云,确定所述顶层的顶层位姿,并从预先设置的各个模板位姿中,选取与所述顶层位姿相匹配的模板位姿,作为第一位姿;其中,所述顶层位姿包括所述顶层中所包括各个包裹的位姿数据;每一模板位姿与满垛层中包裹的一种排布方式相对应,且每一模板位姿对应有预设的抓取方式,所述模板位姿包括满垛层中所包括各个包裹的位姿数据;
16、确定模块,用于基于所识别出的包裹点云,确定针对所述顶层中所包括的所有包裹进行整体抓取的抓取位姿;
17、控制模块,用于控制机械臂按照所述抓取位姿和所述第一位姿对应的抓取方式,将所述顶层中包括的所有包裹从所述货垛上整体抓取至指定位置。
18、第四方面,本申请实施例提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
19、存储器,用于存放计算机程序;
20、处理器,用于执行存储器上所存放的程序时,实现上述任一所述的拆垛方法的步骤。
21、第五方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一所述的拆垛方法的步骤。
22、本申请实施例有益效果:
23、本申请实施例提供的方案,在得到各个包裹的包裹点云后,先判断货垛的顶层是否为满垛层;若顶层为满垛层,根据各个包裹的包裹点云确定顶层位姿,并从预设的各个模板位姿中选取与顶层位姿相匹配的模板位姿,作为第一位姿;接着,基于所识别出的包裹点云,确定针对顶层中所包括的所有包裹进行整体抓取的抓取位姿。由于每一模板位姿对应有预设的抓取方式,因此可以控制机械臂按照所确定的抓取位姿和第一位姿对应的抓取方式,将顶层中包括的所有包裹从货垛上整体抓取至指定位置。这样,机械臂在进行拆垛时,一次可以抓取一层的包裹进行拆垛,从而可以提高拆垛效率。
24、当然,实施本申请的任一产品或方法并不一定需要同时达到以上所述的所有优点。
技术特征:1.一种拆垛方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述位姿数据包括:位置数据以及姿态数据;
3.根据权利要求2所述的方法,其特征在于,所述分别计算该模板位姿中所包括的包裹的位置数据与所述顶层位姿中所包括的包裹的位置数据的第一差异值,以及,该模板位姿中所包括的包裹的姿态数据与所述顶层位姿中所包括的包裹的姿态数据的第二差异值,包括:
4.根据权利要求1所述的方法,其特征在于,针对每一货垛样品,按照以下方式确定模板位姿,其中,所述货垛样品的顶层为满垛层,不同货垛样品的顶层中包裹的排布方式不同:
5.根据权利要求1所述的方法,其特征在于,所述基于所识别出的包裹点云,确定针对所述顶层中所包括的所有包裹进行整体抓取的抓取位姿,包括:
6.根据权利要求1所述的方法,其特征在于,所述基于所识别出的包裹点云,判断所述货垛的顶层是否为满垛层,包括:
7.一种拆垛系统,其特征在于,包括3d相机、控制设备和机械臂;
8.一种拆垛装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-6任一项所述的方法。
技术总结本申请实施例提供了一种拆垛方法、系统、装置、设备以及存储介质,涉及机器人技术领域。具体实现方案为:从货垛上方的3D相机采集的货垛点云中识别各个包裹的包裹点云;基于所识别出的包裹点云,判断所述货垛的顶层是否为满垛层;若所述顶层为满垛层,基于所识别出的包裹点云,确定所述顶层的顶层位姿,并从预先设置的各个模板位姿中,选取与所述顶层位姿相匹配的模板位姿,作为第一位姿;基于所识别出的包裹点云,确定针对所述顶层中所包括的所有包裹进行整体抓取的抓取位姿;控制机械臂按照所述抓取位姿和所述第一位姿对应的抓取方式,将所述顶层中包括的所有包裹从所述货垛上整体抓取至指定位置。可见,通过本方案,可以提高拆垛效率。技术研发人员:陈文楷受保护的技术使用者:杭州海康机器人股份有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/217121.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表