一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法与流程
- 国知局
- 2024-08-01 04:52:35
本专利涉及了一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法。
背景技术:
1、减少停电次数,提高供电可靠性,对低压配电网的不停电作业已经成为供电公司的重要工作。而绝缘斗臂车作业作为配电网带电作业的主要方式,具有机动性强,工作范围大,绝缘性能好等优势。但同样由于低压配电网的限制,该作业方式具有一定的风险,有斗臂车操作不当导致的事故。为了提高作业效率,减少人力成本,保障绝缘斗臂车工作运行时作业人员的生命安全,对斗臂车进行操作控制改造,研发适合绝缘斗臂车智能规划运动路线的运动控制系统具有十分重要的现实意义。绝缘斗臂车的斗臂可被视作机械臂,机械臂运动学研究的是通过建立机械臂运动学模型,分析随着时间的变化,机械臂各关节的位置、速度、加速度与机械臂末端在空间中的变化规律。可以将斗臂按照dh参数法建模,基于无人机三维建模成像系统快速搜索随机树rrt算法,将斗臂视作一般机械臂,可实现绝缘斗臂车斗臂在三维空间中实现自动控制,运动到目标点位。
2、本专利公开了一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法。该方法提出一种将机械臂各关节运动轨迹优化与绝缘斗臂车自动控制相结合的方法,基于无人机倾斜摄影技术得到的带电作业环境的高精度三维建模,以及三维空间内改进rrt快速随机搜索树算法的空间寻路结果,在得到起点、终点与优化后的路径规划点和运动路径的基础上,以关节空间轨迹规划的基本原理,采用五次多项式插值轨迹优化方法,计算斗臂关节节点通过起点-路径点-终点路径的运动过程,以控制斗臂各关节点速度与加速度的运动方程,实现斗臂以平滑的运动姿态和符合实际的速度控制规划通过目标路径。
技术实现思路
1、本发明实施例提供了一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,以至少解决现有技术中绝缘斗臂车斗臂无法在三维空间中实现自动控制的技术问题。
2、根据本发明其中一实施例,提供了一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,包括:
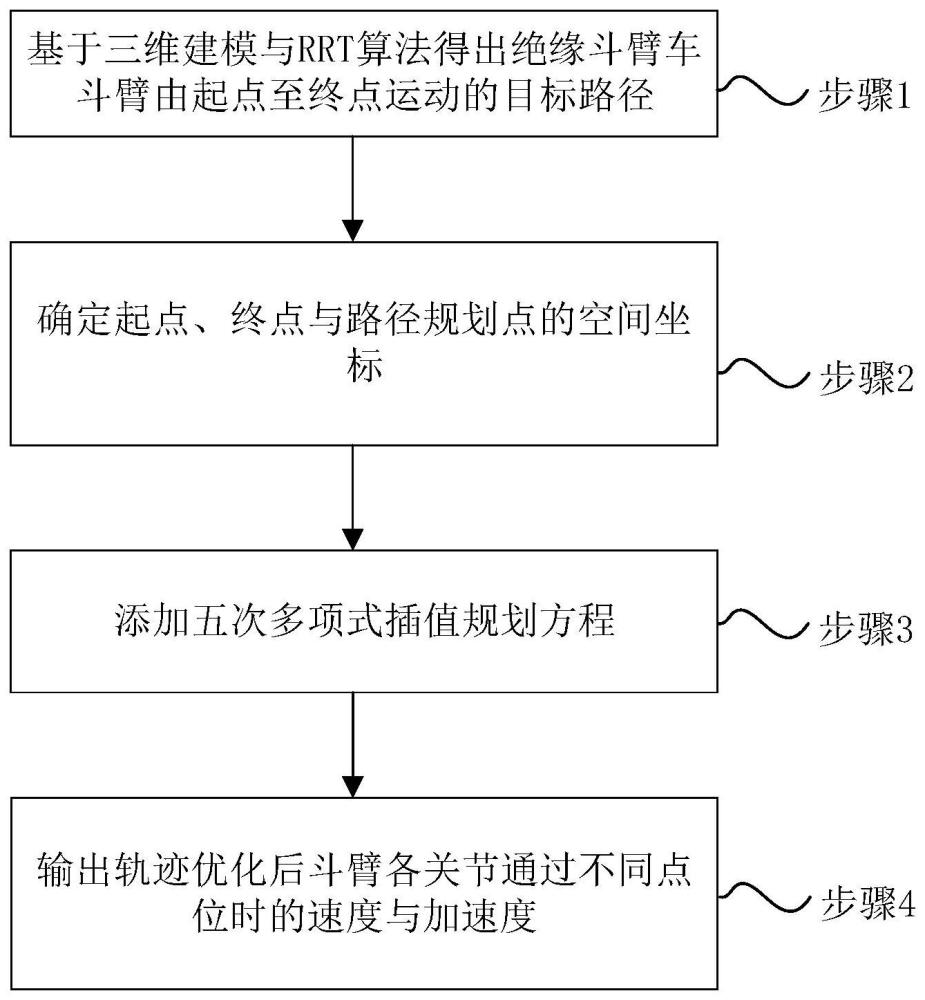
3、步骤1:根据作业要求及实际情况,在程序内导入无人机倾斜摄影技术得到的带电作业环境三维建模,并通过改进的rrt快速随机搜索树技术计算得出斗臂由起点至终点的运动路径;
4、步骤2:根据所规划运动路径的实际情况,确认并提取路径中途径的关键节点为路径规划点,设定为x1-xi;设定起点坐标为x_init,终点坐标为x_goal;
5、步骤3:根据斗臂车各关节通过运动路径的初始位置与目标位置,设定五次多项式参数插值方程,以描述斗臂各关节的运动状态;
6、步骤4:根据已经设定好的五次多项式插值方程,将各个路径规划点带入方程已求解五次多项式插值方程中的参数值,得到具体的斗臂关节通过各点时的位置、速度与加速度数值。
7、可选地,基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法还包括:
8、(1)为满足精准还原带电作业的实际环境,对无人机倾斜摄影技术所得到的环境模型的精度有很高要求,最终要求的模型精度误差应不超过2cm;
9、(2)考虑到仿真环境下绝缘斗臂车运动避障与实际环境中的误差关系,要求实际避障算法的轨迹规划中运动轨迹与障碍物间应留有一定阈值,可通过在读取环境模型时,对所有建模边界外围0.15m尺寸内同实体建模一同考虑进障碍物判定内。
10、可选地,基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法还包括:
11、步骤11:根据实际作业需求,算法需设定合理的起点坐标x_init,终点坐标x_goal,随机点x_rand,探索随机树three,树枝探索的步长delta,靠近终点时结束的阈值thr;
12、步骤12:为满足算法更快速迭代计算,针对基础rrt算法加以改进,额外增加了步长delta的动态伸长算法,随机点x_rand的收束性约束算法和树枝节点与环境障碍物的碰撞检测算法;
13、步骤13:树枝生长得到目标路径后,对树枝节点进行优化删减,最终得到的优化路径为环境空间中连接起点与终点的简易折线。
14、可选地,基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法还包括:
15、(1)最终所得路径为步骤13中优化后所得的连接起点与终点的简易折线;
16、(2)所选取的路径规划点即为步骤13中所得折线的拐点。
17、可选地,基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法还包括:
18、步骤31:对于绝缘斗臂车斗臂的各个关节,设置其初始角度为θ0,运动目标角度为θm,θ(t),θ'(t)和θ”(t)分别表示旋转角度、速度与加速度随时间的变化方程;
19、步骤32:设定m0,m1,m2,m3,m4,m5为所求插值多项式系数,斗臂旋转速度与加速度的初始值与末端值均为0;
20、步骤33:带入运动情况求解得到m0,m1,m2,m3,m4,m5的数值,进一步得到绝缘斗臂车斗臂运动过程中各关节的运动位置、速度与加速度。
21、可选地,基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法还包括:
22、(1)所设定的关于θ(t),θ'(t)和θ”(t)的五次多项式参数方程为:
23、
24、(2)插值函数的初始边界条件为:
25、
26、可选地,基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法还包括:
27、(1)根据所述插值函数的初始边界条件,可求出五项插值多项式系数如下:
28、
29、(2)剩余参数的求解过程可由以下矩阵方程得出:
30、
技术特征:1.一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,包括:
2.根据权利要求1所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,所述步骤1包括:
3.根据权利要求1所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,所述步骤1还包括:
4.根据权利要求1所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,所述步骤2包括:
5.根据权利要求1所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,所述步骤3包括:
6.根据权利要求5所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,所述步骤31和所述步骤32包括:
7.根据权利要求1所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法,其特征在于,所述步骤4包括:
8.一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划装置,其特征在于,包括:
9.一种电子设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述权利要求1至7任一项中所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,其中,所述计算机程序被设置为在计算机或处理器上运行时,执行上述权利要求1至7任一项中所述的基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法。
技术总结本申请公开了一种基于路径规划结果的绝缘斗臂车斗臂运动轨迹规划方法。该方法基于改进RRT快速随机搜索树算法的空间寻路结果,考虑到绝缘斗臂车斗臂运动的实际速度、角速度与加速度,基于关节空间轨迹规划的基本原理求解得到绝缘斗臂车斗臂的轨迹规划方法。技术研发人员:杨鑫,胡聪,邱明明,何文峰,刘超,吴慧峰,韩广超,李浩,时云月,姜大军,徐远科受保护的技术使用者:广东电网有限责任公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/217107.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种高速倒筒机的制作方法
下一篇
返回列表