一种纱筒撑袋组件的制作方法
- 国知局
- 2024-08-01 04:53:41
本技术涉及一种纱筒包装设备,特别是一种纱筒撑袋组件。
背景技术:
1、在纺织领域,纱线经绕纱机绕制成筒状后,需要将纱筒装入到薄膜袋当中。现有技术中纱筒的套袋通常是由人工操作,纱筒的重量约在15公斤至30公斤不等,人工套袋不能适应流水线的高速生产,同时劳动强度大,需求较高的人力成本。套袋工艺的自动化难点在于薄膜袋的厚度尺寸极小,很难控制薄膜袋的开口大小,套袋失败的概率较大,严重影响套袋的良品率。现有技术中套袋装置多为半自动化,仍需求额外人力帮助撑袋,因此并不能达到理想的工作效率。
技术实现思路
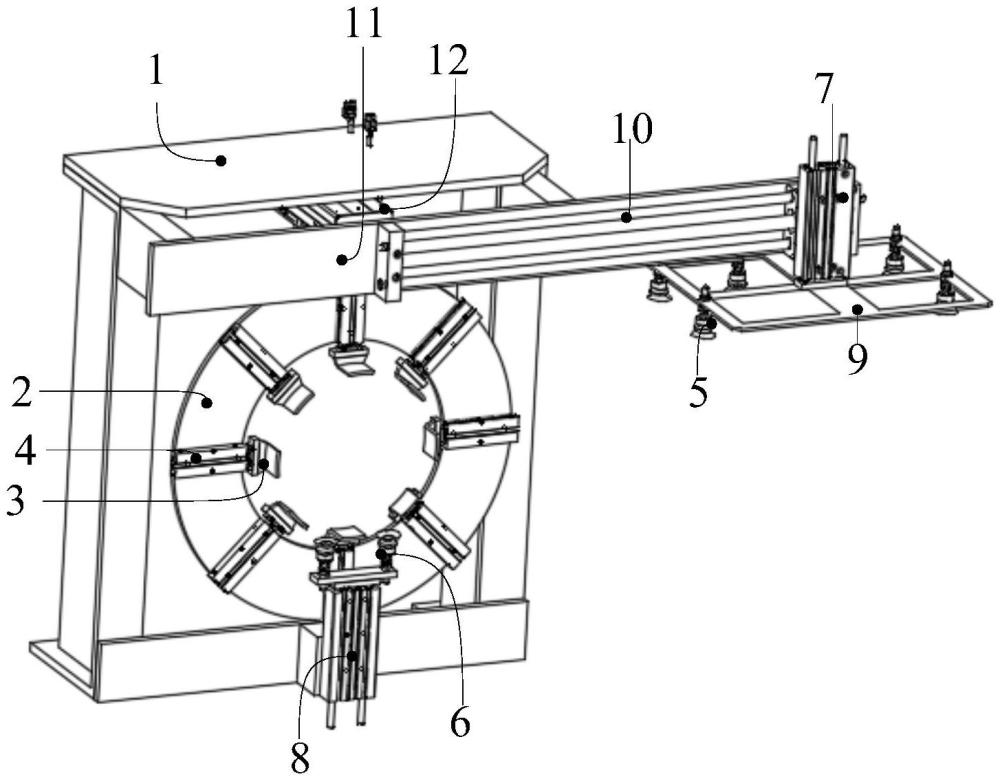
1、为解决上述技术问题,本实用新型提供了一种纱筒撑袋组件,其特征在于:包括支架与连接于所述支架上的外吸袋单元和内撑袋单元;
2、所述内撑袋单元包括支撑圆盘,沿所述支撑圆盘的竖直端面上设置有多组共轴心排布的直线驱动元件,所述直线驱动元件的输出端连接有内撑爪,所述直线驱动元件带动内撑爪沿支撑圆盘的径向移动;
3、所述外吸袋单元包括多个从外侧吸附薄膜袋的吸袋元件。
4、进一步地,所述直线驱动元件为固定设于所述支撑圆盘上的撑袋气缸,所述内撑爪与撑袋气缸的输出轴相连。
5、进一步地,所述内撑爪沿所述支撑圆盘的端面环状均匀排布。
6、进一步地,所述吸袋元件包括分别位于所述支撑圆盘轴心上下两侧的上吸盘和下吸盘,所述上吸盘和下吸盘分别连接在上吸袋驱动件和下吸袋驱动件的输出端。
7、进一步地,所述上吸袋驱动件的输出端连接有为所述上吸盘提供支撑的吸盘架;所述上吸盘为多组,排布连接于吸盘架的下端。
8、进一步地,所述上吸盘与下吸盘均为真空吸盘,所述真空吸盘通过气动接头连接至外部真空设备。
9、进一步地,所述支撑圆盘的上方设置有与所述支撑圆盘的端面相平行的水平滑轨,所述水平滑轨通过连接板设置在所述支架上;所述上吸袋驱动件固定连接在所述水平滑轨的滑块上。
10、进一步地,所述支架上还设置有带动所述支撑圆盘沿轴向移动的直线移动模组。
11、进一步地,所述直线移动模组为固定安装于所述支架上的直线滑台,所述支撑圆盘连接于所述直线滑台的滑块上。
12、进一步地,所述直线滑台的侧部连接有驱动电机,所述直线滑台的动力输入端与驱动电机的输出轴通过皮带轮结构相连。
13、本实用新型提供了一种纱筒撑袋组件,包括支撑架与连接于支架的外吸袋单元和内撑袋单元;外吸袋单元包括多个吸盘,从外侧吸附薄膜袋,使薄膜袋张开开口;内撑袋单元包括多个沿支撑圆盘的端面排布的内撑爪,从内侧撑开薄膜袋。由于内撑爪呈环状排布,能够使薄膜袋维持稳定的撑开状态。本实用新型的结构简单,稳定性高,具有较强的循环能力,能够适应高速的纱筒包装环境。
技术特征:1.一种纱筒撑袋组件,其特征在于:包括支架与连接于所述支架上的外吸袋单元和内撑袋单元;
2.如权利要求1所述的一种纱筒撑袋组件,其特征在于:所述直线驱动元件为固定设于所述支撑圆盘上的撑袋气缸,所述内撑爪与撑袋气缸的输出轴相连。
3.如权利要求1所述的一种纱筒撑袋组件,其特征在于:所述内撑爪沿所述支撑圆盘的端面环状均匀排布。
4.如权利要求1所述的一种纱筒撑袋组件,其特征在于:所述吸袋元件包括分别位于所述支撑圆盘轴心上下两侧的上吸盘和下吸盘,所述上吸盘和下吸盘分别连接在上吸袋驱动件和下吸袋驱动件的输出端。
5.如权利要求4所述的一种纱筒撑袋组件,其特征在于:所述上吸袋驱动件的输出端连接有为所述上吸盘提供支撑的吸盘架;所述上吸盘为多组,排布连接于吸盘架的下端。
6.如权利要求4所述的一种纱筒撑袋组件,其特征在于:所述上吸盘与下吸盘均为真空吸盘,所述真空吸盘通过气动接头连接至外部真空设备。
7.如权利要求4所述的一种纱筒撑袋组件,其特征在于:所述支撑圆盘的上方设置有与所述支撑圆盘的端面相平行的水平滑轨,所述水平滑轨通过连接板设置在所述支架上;所述上吸袋驱动件固定连接在所述水平滑轨的滑块上。
8.如权利要求4所述的一种纱筒撑袋组件,其特征在于:所述支架上还设置有带动所述支撑圆盘沿轴向移动的直线移动模组。
9.如权利要求8所述的一种纱筒撑袋组件,其特征在于:所述直线移动模组为固定安装于所述支架上的直线滑台,所述支撑圆盘连接于所述直线滑台的滑块上。
10.如权利要求9所述的一种纱筒撑袋组件,其特征在于:所述直线滑台的侧部连接有驱动电机,所述直线滑台的动力输入端与驱动电机的输出轴通过皮带轮结构相连。
技术总结本技术提供了一种纱筒撑袋组件,包括支撑架与连接于支架的外吸袋单元和内撑袋单元;外吸袋单元包括多个吸盘,从外侧吸附薄膜袋,使薄膜袋张开开口;内撑袋单元包括多个沿支撑圆盘的端面排布的内撑爪,从内侧撑开薄膜袋。由于内撑爪呈环状排布,能够使薄膜袋维持稳定的撑开状态。本技术的结构简单,稳定性高,具有较强的循环能力,能够适应高速的纱筒包装环境。技术研发人员:刘振东,熊斌,徐哲,张向锋受保护的技术使用者:东韵智机(苏州)智能机器人有限公司技术研发日:20231204技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/217210.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表