一种用于生活垃圾焚烧STP炉排燃烧速度优化控制方法及装置与流程
- 国知局
- 2024-08-01 01:44:51
本发明涉及垃圾焚烧的,具体涉及一种用于生活垃圾焚烧stp炉排燃烧速度优化控制方法及装置。
背景技术:
1、随着经济的发展和人民生活水平的提高,无论是城市生活垃圾,还是农村地区生活垃圾,其产生量越来越大,垃圾成分也越来越复杂。从最开始简单填埋的处理方式,逐渐向综合处置的方式转变,注重源头减量和综合利用,从而能够有效控制污染、回收资源,减少垃圾的处理量,从根本上改变了垃圾处理的内涵。生活垃圾收集、运输、处置的工作量越来越大,难度也越来越高。
2、生活垃圾污染已严重影响到人民生存的生态环境。如不加速垃圾处理进程,垃圾问题将成为制约社会经济与社会发展,影响人民生活质量的一个重要因素。在这样的背景下,垃圾焚烧成为了一种可行的解决方案。通过生活垃圾焚烧技术,可以将垃圾转化为清洁能源,实现资源的再利用,同时减少垃圾对环境的污染。
3、生活垃圾在炉排上的推动速度是垃圾连续燃烧、均匀充分燃烧、维持炉膛温度和燃烧工况稳定、有利于环保参数的控制的重要保证,生活垃圾炉排推动速度主要是由dcs程序自动完成,确保不同的工况下保持合理的推动速度,以维持焚烧炉温度符合环保要求,同时稳定焚烧炉工况产生稳定的蒸汽流量,提高锅炉热效率。目前我国生活垃圾焚烧炉排炉项目基本实现炉排自动给料,其控制方法基本满足生产需求,但是大部分炉排炉项目炉排的推动速度保持恒定模式,仅存在简单的启动、停止功能,且炉排片动作行程也为固定长度。这样的给料方式不利于对焚烧炉工况的调整,若前端给料装置存在架桥情况,以及后端输灰装置存在卡料等不正常运行情况下,有且仅有的处理方式就是停止炉排动作,导致垃圾在炉排上进行燃烧反应却无法进行翻动,炉排片空气流通受阻或氧气供应不足,导致燃烧不充分或者不稳定,不利于企业的安全生产运行以及环保指标调控。若炉排片长时间不动作,则会导致炉内温度难以维持850℃以上,则需要通过启动燃烧器辅助燃烧维持炉内温度,从而增加了企业的环保风险和生产运行成本。同时炉排片长时间不动作,易导致炉排出现断料情况,此时若大量增加投料量,存在垃圾容易成堆,给料不均匀等弊端,影响垃圾在焚烧炉内燃烧不完全,燃烧不连续,焚烧炉区间温度不均匀,导致炉膛温度波动,燃烧工况不稳定,甚至不利于环保参数的控制等。
技术实现思路
1、本发明的目的在于提供一种用于生活垃圾焚烧stp炉排燃烧速度优化控制方法及装置,以克服现有技术中的上述缺陷。
2、一种用于生活垃圾焚烧stp炉排燃烧速度优化控制方法,包括如下步骤:
3、步骤一、获取炉排给料装置的实时位移、前进段和后退端,将炉排给料装置的前进段和后退端进行计算,得到炉排给料装置动作行程;
4、步骤二、获取炉排给料装置的前进或后退的速度以及实时位移;
5、步骤三、获取中控状态、驱动装置运行状态、紧急停止信号mft以及him人机操作界面运行指令和停止指令进行逻辑计算,得到炉排给料装置中控运行中状态,将所述炉排给料装置中控运行中状态、中控状态、驱动装置运行状态以及前进指令进行逻辑计算,得到炉排给料装置单周期运行中状态。
6、步骤四、获取炉排给料装置后退到位状态,将所述炉排给料装置后退到位状态、单周期运行中状态、前进励磁驱动中进行逻辑计算,得到炉排给料装置前进指令;
7、步骤五、获取炉排给料装置前进到位状态,将所述炉排给料装置前进到位状态、单周期运行中状态、后退励磁驱动中进行逻辑计算,得到炉排给料装置后退指令;
8、步骤六、将获取的给料装置循环驱动指令、中控运行中状态、中控状态、驱动装置运行状态、前进到位状态以及后退励磁驱动进行逻辑计算,得到前进励磁驱动;将炉排给料装置中控运行中状态、中控状态、驱动装置运行状态、后退到位状态以及前进励磁驱动进行逻辑计算,得到后退励磁驱动;
9、步骤七、获取炉排给料装置的停止时间;
10、步骤八、获取炉排给料装置的前进速度设定值以及后退速度设定值;
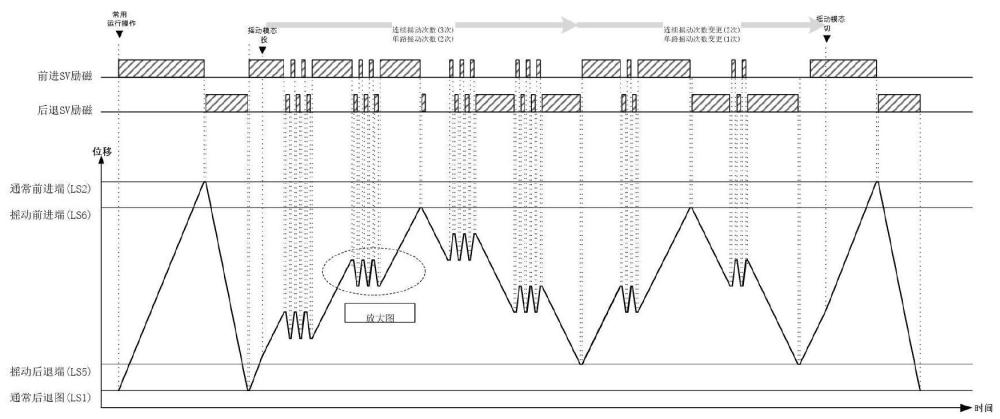
11、步骤九、获取炉排给料装置的摇动模态投切、摇动时静动前进速度v1、摇动时静动后退速度v2、摇动时前进速度v3、摇动时后退速度v4、摇动停止时间、摇动前进端、摇动后退端、摇动行程长度、连续摇动次数以及单路摇动次数。
12、优选地,所述步骤二具体为将炉排给料装置的前进或后退速度与时间进行模拟积算,得到炉排给料装置的实际动作行程和实时动态位移;将所述炉排给料装置的实际动作行程与上述炉排给料装置动作行程进行比较,得到炉排给料装置的前进或后退到位状态;或将所述炉排给料装置的实时动态位移与上述炉排给料装置的前进或后退端进行比较,得到炉排给料装置的前进或后退到位状态。
13、优选地,所述步骤七具体为将炉排给料装置的停止时间、him人机操作界面运行指令、停止指令、后退到位状态进行逻辑计算,得到炉排给料装置循环驱动指令以及停止时间剩余时间,同时当停止时间剩余时间为0的时候,触发循环逻辑模块启动功能,再一次得到炉排给料装置循环驱动指令且停止时间剩余时间自动等于停止时间;在满足相关要求且未触发停止指令的正常情况下,炉排给料装置循环驱动指令会根据获取的炉排给料装置停止时间循环计算,反复触发炉排给料装置循环驱动指令。
14、优选地,所述步骤八具体为将所述炉排给料装置前进速度设定值、后退速度设定值以及后退励磁驱动进行逻辑选择计算,得到炉排给料装置速度指令;将所述炉排给料装置速度指令通过相关函数进行转换,后退励磁驱动参与选择输出,得到比例调节阀开度指令,此指令实际控制炉排给料装置前进或后退,以及前进速度和后退速度。
15、优选地,所述步骤九具体为将炉排给料装置的摇动模态投切、摇动时静动前进速度v1、摇动时静动后退速度v2、摇动时前进速度v3、摇动时后退速度v4以及后退励磁驱动进行逻辑选择计算,得到摇动速度设定值;将所述炉排给料装置摇动模态投切、摇动前进端、摇动后退端、摇动行程长度、连续摇动次数以及单路摇动次数进行逻辑计算,得到每单路摇动时的前进端和后退端。
16、一种用于生活垃圾焚烧stp炉排燃烧速度优化控制方法的装置,包括如下模块:
17、预设模块:用于获取炉排给料装置实时位移、前进段、后退端、前进速度设定值、后退速度设定值、停止时间、摇动模态投切、摇动时静动前进速度v1、摇动时静动后退速度v2、摇动时前进速度v3、摇动时后退速度v4、摇动停止时间、摇动前进端、摇动后退端、摇动行程长度、连续摇动次数以及单路摇动次数;
18、给料控制获取模块:用于控制炉排给料装置在所预设参数要求下循环触发驱动指令,控制炉排给料装置循环往复动作;
19、速度设定获取模块:获取所得的速度设定值通过相关函数转换成现场比例调节阀开度指令,用于控制炉排给料装置的实际动作速度。
20、优选地,给料控制获取模块具体包括:
21、第一计算模块:用于获取所述炉排给料装置各动作段情况的判定情况以及摇动模式投切判定;
22、第二计算模块:用于获取所述炉排给料装置在摇动过程中的实时状态记录;
23、第三计算模块:用于获取所述炉排给料装置单次摇动、连续摇动的行程分配计算;
24、第四计算模块:用于获取所述炉排给料装置动作驱动指令。
25、优选地,第一计算模块具体包括:
26、第一计算单元:用于对炉排给料装置在摇动模态情况下前进端和后退端的判定,摇动模态下炉排给料装置实时位移大于等于摇动前进端时,判定为摇动中前进端;实时位移小于等于摇动后退端时,判定为摇动中后退端;
27、第二计算单元:用于对炉排给料装置在摇动模态和非摇动模态情况下前进端和后退端的判定,选择输出位摇动/非摇动前进到位、摇动/非摇动后退到位,参与步骤六中的逻辑计算;
28、第三计算单元:用于获取炉排给料装置摇动模态投切状态,中控状态、单周期运行中状态与摇动模态投切和其反信号进行逻辑连锁,通过以一秒脉冲信号,实现对摇动模态切换时信号的记录,用于消除摇动模态与非摇动模态切换时对逻辑计算的扰动。
29、优选地,第二计算模块具体包括:
30、第一记录单元:用于获取炉排给料装置摇动一个周期运行中、摇动选择且运行中;
31、第二记录单元:用于获取摇动前进端/后退端,即获取摇动模态下所处的动作端,无论是前进端还是后退端,均被记录;通过对动作端和励磁驱动的判定,记录处于后退中状态;
32、第三计算单元:用于获取炉排给料装置摇动过程中的状态记录,后退中状态和摇动后退端进行逻辑“与”计算,和摇动前进端/后退端进行逻辑“或”计算,得到后退现在记忆状态;可进行逻辑计算得到前进现在记忆状态;
33、第四计算单元:用于获取在摇动模态下,记录摇动第1次前进端到达状态;当在摇动后退中且到达前进端,或者在非摇动后退中且到达后退端时,触发计数模块并记录触发次数,当触发次数大于等于连续摇动次数或者摇动前进端/后退端为1时,记录摇动端部记忆状态。
34、优选地,第三计算模块具体包括:
35、第一记录单元:用于获取炉排给料装置摇动幅度,在摇动选择且运行中状态下,通过摇动前进端和摇动后退端进行减法计算,然后除以“单路摇动次数+1”,得到摇动幅度;
36、第二记录单元:用于获取前进端,即在前进现在记忆状态选择下,实时位移与摇动幅度进行加法运算,得到过程变量a;在摇动端部记忆状态下,对过程变量a进行逻辑选择输出,得到过程变量b;过程变量b和摇动行程长度进行减法运算,得到过程变量f;
37、第三记录单元:用于获取后退端,即在后退现在记忆状态选择下,实时位移与摇动幅度进行减法运算,得到过程变量d;在摇动端部记忆状态下,对过程变量d进行逻辑选择输出,得到过程变量e;过程变量e和摇动行程长度进行加法运算,得到过程变量c;
38、第四记录单元:上述过程变量b和c进行选择输出,当后退中状态为1时,得到前进端为c;反之,前进端为b;
39、第五记录单元:上述过程变量e和f进行选择输出,当后退中状态为1时,得到后退端为e;反之,后退端为f;
40、第六记录单元:上述过程中实时位移、过程变量c、前进端参与计算上限为“摇动前进端-5mm”,述过程中实时位移、过程变量f、后退端参与计算下限为“摇动后退端+5mm”。
41、本发明具有如下优点:
42、1、通过dcs控制系统采集炉排给料装置现场位移传感器信号,同时需要操作员在dcs系统him人机画面进行合理参数设置。通过调节前进到位、后退到位的数值,可固定上述装置的可动作形成区间;调节前进速度、后退速度的设定值,就是调整比例调节阀的实际开度控制液压油量大小,调节停止时间,就是调整上述装置的动作频率。摇动模态的投入,使上述装置在单循环动作行程内动作的频率大幅提高,从而提高空气的流通均匀性和促进垃圾燃烧性,确保垃圾在生产工作状态下充分燃烧,进而缩短了工况调整所用的时间,保证环保指标在正常范围内波动和产生运行生产效益最大化。
43、2、摇动模态参数的调整具有多样性,单路摇动次数、连续摇动次数的预设能够更好地适应各种工况的调整,及时的调整空气的流通均匀性和促进垃圾燃烧性;摇动时静动前进速度v1、摇动时静动后退速度v2、摇动时前进速度v3、摇动时后退速度v4、摇动停止时间、摇动前进端、摇动后退端、摇动行程长度等参数有操作员单独设置,体现出摇动模态工作独立性;摇动模态投切由操作员根据实际情况调整具体参数,根据相关逻辑使其在摇动模态投切切换时具有较好的抗干扰能力,从而提高了焚烧炉燃烧效率并改善了焚烧炉的运行安全性,且由于避免了垃圾在炉排段堆积或者断料,因此改善了污染排放超标的情况,减少污染物的排放,维持炉温符合环保要求,降低生产成本。
本文地址:https://www.jishuxx.com/zhuanli/20240724/206628.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。