一种智能取件分拣机器人
- 国知局
- 2024-07-29 11:27:24
本申请涉及物流的,尤其是涉及一种智能取件分拣机器人。
背景技术:
1、随着互联网经济的发展,人们生活水平的提高,电商平台的快速发展,网购已经成为了人民必不可少的购物方式,大量网购行为对快递驿站提出新的要求。
2、目前,一般的中大型快递驿站通常是由人工对快递进行分拣与整理,并将快递信息发送给消费者,从而使得消费者易于取件。
3、由于中大型驿站的快递数量多,分拣空间大,使得人工分拣的效率降低,从而延迟了消费者取件的时间。
技术实现思路
1、为了提高快递分拣的效率,本申请提供一种智能取件分拣机器人。
2、本申请提供的一种智能取件分拣机器人,采用如下的技术方案:
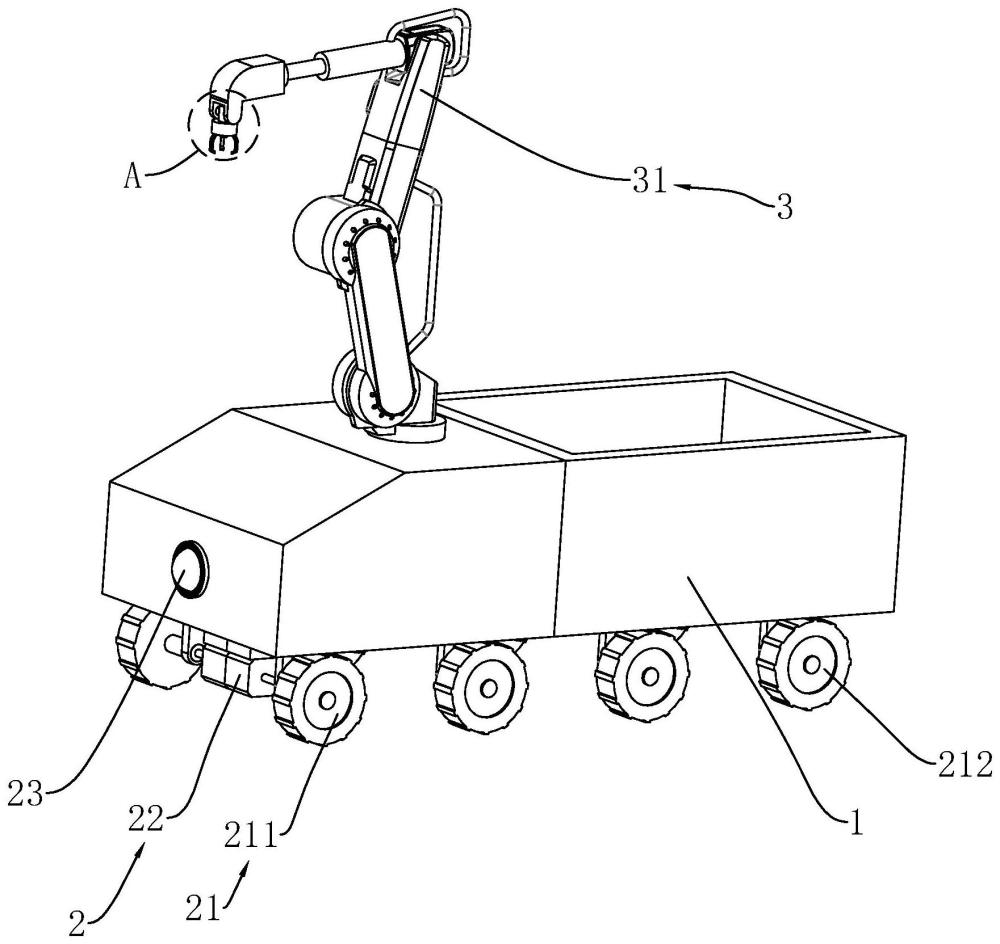
3、一种智能取件分拣机器人,包括车体,所述车体上设置有移动组件和抓取组件,所述移动组件位于所述车体的底端,且与所述车体连接,所述抓取组件位于所述车体的顶端,且与所述车体连接,所述抓取组件用于抓取快递,所述移动组件用于使所述车体移动。
4、通过采用上述技术方案,当抓取组件将快递放置在车体的储物区后,移动组件带动车体移动到快递架处,抓取组件将快递摆放在快递架上,使得分拣机器人能够对快递进行分拣,从而提高了快递分拣的效率。
5、可选的,所述移动组件包括车轮组和电机,所述车轮组包括驱动车轮和从动车轮,所述驱动车轮和所述从动车轮分别位于所述车体的两端,所述驱动车轮设置有两个以上,两个以上的所述驱动车轮均匀设置在所述车体的两侧,且均与所述车体转动连接,所述从动车轮设置有多个,多个所述从动车轮均匀设置在所述车体的两侧,且均与所述车体转动连接,所述电机设置有多个,且与所述驱动车轮一一对应,所述电机与所述车体固定连接,所述电机的输出轴与所述驱动车轮同轴固定连接。
6、通过采用上述技术方案,启动电机,电机驱动驱动车轮进行移动,从动车轮跟随驱动车轮移动,当两个电机转向相同时,使得车体能够前进或后退,当两个电机转向相反时,使得车体能够原地转向,从而使得车体能够灵活移动。
7、可选的,所述抓取组件包括机械臂,所述机械臂设置在所述车体的顶端,所述机械臂的基座与所述车体转动连接。
8、通过采用上述技术方案,通过设置机械臂,使得分拣机器人能够对快递进行抓取,机械臂的基座与车体转动连接,使得机械臂抓取快递后能够将快递放置在车体的储物区。
9、可选的,所述机械臂由气压驱动。
10、通过采用上述技术方案,机械臂通过气压驱动,与液压驱动方式相比,使得分拣机器人不会因液压油外漏而污染坏境。
11、可选的,所述移动组件还包括避障摄像头,所述避障摄像头位于所述车体靠近所述电机的一端,且与所述车体固定连接。
12、通过采用上述技术方案,在车体行进过程中,避障摄像头对车体前方的图像进行扫描,使得分拣机器人能够获知自身行进路线上的障碍物。
13、可选的,所述机械臂的机械爪上设置有扫描摄像头,所述扫描摄像头与所述机械臂的机械爪固定连接。
14、通过采用上述技术方案,当机械臂的机械爪移动到快递处后,扫描摄像头对快递的信息进行扫描,使得分拣机器人能够获知快递的信息。
15、可选的,所述车体上设置有供电组件,所述供电组件与所述车体固定连接,且用于给分拣机器人进行供电。
16、通过采用上述技术方案,通过设置供电组件,使分拣机器人能够依靠自身的电源进行运动,从而使得分拣机器人能够灵活分拣快递。
17、可选的,所述供电组件包括锂电池和充电插口,所述锂电池与所述车体固定连接,所述充电插口位于所述车体的底端,且与所述车体固定连接,所述充电插口与所述锂电池电连接。
18、通过采用上述技术方案,锂电池给分拣机器人提供电力,使得分拣机器人能够进行移动,当锂电池电量不足时,充电插口与充电桩连接,从而实现对锂电池的充电。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1.通过设置车体、车轮、电机和机械臂,使得分拣机器人能够对快递进行分拣,从而提高了快递分拣的效率;
21、2.通过设置避障摄像头,避障摄像头对车体前方的图像进行扫描,使得分拣机器人能够获知自身行进路线上的障碍物;
22、3.通过设置扫描摄像头,使得分拣机器人能够获知快递的信息;
23、4.分拣机器人可以与控制系统电连接,控制系统配合电机和驱动车轮实现对分拣机器人的自动行进,控制系统可以与手机移动端通信,且配合扫描摄像头实现快递信息与手机移动端的互通,控制系统与避障摄像头配合实现车体的灵活避障,从而使得分拣机器人与现有的控制系统配合实现智能化分拣快递。
技术特征:1.一种智能取件分拣机器人,其特征在于:包括车体(1),所述车体(1)上设置有移动组件(2)和抓取组件(3),所述移动组件(2)位于所述车体(1)的底端,且与所述车体(1)连接,所述抓取组件(3)位于所述车体(1)的顶端,且与所述车体(1)连接,所述抓取组件(3)用于抓取快递,所述移动组件(2)用于使所述车体(1)移动。
2.根据权利要求1所述的一种智能取件分拣机器人,其特征在于:所述移动组件(2)包括车轮组(21)和电机(22),所述车轮组(21)包括驱动车轮(211)和从动车轮(212),所述驱动车轮(211)和所述从动车轮(212)分别位于所述车体(1)的两端,所述驱动车轮(211)设置有两个以上,两个以上所述驱动车轮(211)均匀设置在所述车体(1)的两侧,且均与所述车体(1)转动连接,所述从动车轮(212)设置有多个,多个所述从动车轮(212)均匀设置在所述车体(1)的两侧,且均与所述车体(1)转动连接,所述电机(22)设置有多个,且与所述驱动车轮(211)一一对应,所述电机(22)与所述车体(1)固定连接,所述电机(22)的输出轴与所述驱动车轮(211)同轴固定连接。
3.根据权利要求1所述的一种智能取件分拣机器人,其特征在于:所述抓取组件(3)包括机械臂(31),所述机械臂(31)设置在所述车体(1)的顶端,所述机械臂(31)的基座与所述车体(1)转动连接。
4.根据权利要求3所述的一种智能取件分拣机器人,其特征在于:所述机械臂(31)由气压驱动。
5.根据权利要求2所述的一种智能取件分拣机器人,其特征在于:所述移动组件(2)还包括避障摄像头(23),所述避障摄像头(23)位于所述车体(1)靠近所述电机(22)的一端,且与所述车体(1)固定连接。
6.根据权利要求3所述的一种智能取件分拣机器人,其特征在于:所述机械臂(31)的机械爪上设置有扫描摄像头(32),所述扫描摄像头(32)与所述机械臂(31)的机械爪固定连接。
7.根据权利要求1所述的一种智能取件分拣机器人,其特征在于:所述车体(1)上设置有供电组件(4),所述供电组件(4)与所述车体(1)固定连接,且用于给分拣机器人进行供电。
8.根据权利要求7所述的一种智能取件分拣机器人,其特征在于:所述供电组件(4)包括锂电池(41)和充电插口(42),所述锂电池(41)与所述车体(1)固定连接,所述充电插口(42)位于所述车体(1)的底端,且与所述车体(1)固定连接,所述充电插口(42)与所述锂电池(41)电连接。
技术总结本申请涉及一种智能取件分拣机器人,涉及物流的技术领域,其包括车体,所述车体上设置有移动组件和抓取组件,所述移动组件位于所述车体的底端,且与所述车体连接,所述抓取组件位于所述车体的顶端,且与所述车体连接,所述抓取组件用于抓取快递,所述移动组件用于使所述车体移动。本申请具有提高快递分拣效率的效果。技术研发人员:姚晓杰,赵子状,贺养慧受保护的技术使用者:山西工学院技术研发日:20231128技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240725/136241.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表