一种桥梁波腹板总装箱梁的激光清洗设备的制作方法
- 国知局
- 2024-07-29 12:47:34
本发明属于激光清洗设备,具体涉及一种桥梁波腹板总装箱梁的激光清洗设备。
背景技术:
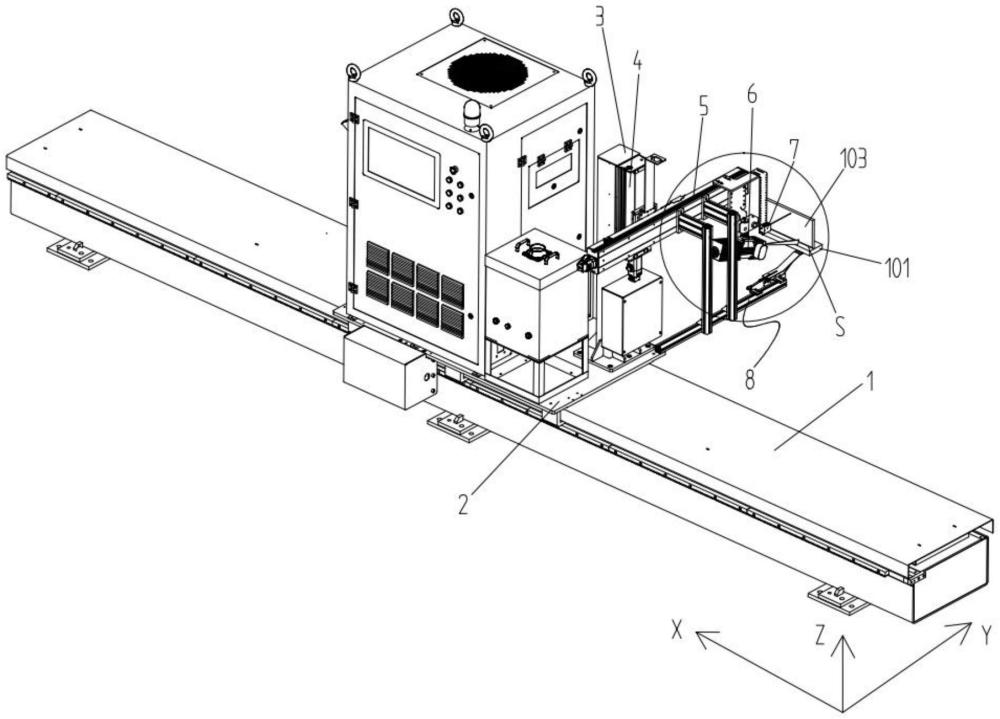
1、如图1所示,桥梁波腹板总装箱梁100包括:底板101、顶板102、波腹板103,所述波腹板103上端、下端对应与顶板102、底板101通过焊接连接,所述波腹板103具有波峰部1031、波谷部1032,且不同位置存在一定的高度差,且存在上下斜坡、上弯翘曲、内凹旁弯等特征。
2、当需要对桥梁波腹板总装箱梁100底部的焊缝s(即波腹板103下端与底板101焊接形成的s型弯曲焊缝)进行激光清洗时,需要将桥梁波腹板总装箱梁100放置到若干支撑单元104上,支撑单元104位于底板102下方,且使得底板101与支撑单元104底部接触。
3、进一步的,为适应波腹板103的外形轮廓(具有波峰部1031、波谷部1032)以及高度差,需要采用激光焊缝系统跟随波腹板103的焊缝s,上述跟随过程中,需要实时采集焊缝的位置信息,但由于底板101、焊接波腹板103装配后,底板101暴露在外部的部位很小,例如波谷部1032的焊缝到底板101的边缘只有20mm,因此在底板101上方,可以用于采集焊缝位置的定位特征有限,从底板101下方采集焊缝位置信息,也容易受到支撑单元104的位置干涉影响,且无论从上方或下方检测底板101的边缘,激光清洗产生的飞溅也会干扰激光跟随清洗系统,因此无法实现良好的焊缝跟随效果,导致对于焊缝s的激光清洗效果不佳。
技术实现思路
1、针对现有技术的不足,本发明提供了一种桥梁波腹板总装箱梁的激光清洗设备,其无需采集过多的定位特征即可完成焊缝跟随,同时可通过碰撞检测组件与底部支撑单元的碰撞程度及时产生锁止信号,避免因误判导致激光清洗模组下移,激光清洗模组撞击底板的情况发生。
2、具体的,本发明提供了一种桥梁波腹板总装箱梁的激光清洗设备,其包括:
3、z向移动模组;
4、y向移动模组,其连接所述z向跟随模组,且可在所述z向移动模组的驱动下沿z向移动;
5、激光清洗模组,其连接所述y向移动模组,且可在所述y向移动模组的驱动下沿y向移动,用于输出作用至桥梁波腹板总装箱梁的焊缝的激光光束,以通过激光光束对焊缝进行激光清洗;
6、以及碰撞检测组件,其连接所述y向移动模组,且可在所述y向移动模组的驱动下沿y向移动,用于获取其与桥梁波腹板总装箱梁的底板的下表面之间的距离信息,且反馈至z向移动模组,且在与桥梁波腹板总装箱梁下方的支撑单元发生碰撞时产生锁止信号;
7、所述z向移动模组接收碰撞检测组件、底板的下表面之间的距离信息,且根据该距离信息带动激光清洗模组沿z向移动,以使得激光清洗模组靠近/远离桥梁波腹板总装箱梁的底板运动,以及,所述z向移动模组根据所述锁止信号停止z向移动。
8、优选的,所述激光清洗设备还包括:
9、y向测距模组,其连接所述y向移动模组,用于获取y向上波腹板的距离信息,并将所述距离信息反馈至y向移动模组;
10、所述y向移动模组根据y向上波腹板的距离信息带动激光清洗模组沿y向移动,以使得激光清洗模组靠近/远离波腹板运动。
11、优选的,所述碰撞检测组件包括:
12、框架,其连接所述y向移动模组;
13、第一安装件,其连接所述框架;
14、第一检测单元,其连接所述第一安装件1;
15、第二安装件,其连接所述框架;
16、转动件,其连接所述第二安装件,且可执行回转动作;
17、感应件,其一端连接所述转动件,另一端自由悬空;
18、摆臂,其一端连接所述转动件,另一端朝向底板下方延伸,且自由悬空,且所述摆臂自由悬空的一端上开设有出光孔;
19、第二检测单元,其用于输出测距激光,且根据测距激光获取第二检测单元与底板下表面之间的距离信息。
20、优选的,所述摆臂与桥梁波腹板总装箱梁下方的支撑单元发生碰撞后,且所述测距激光被摆臂自由悬空的一端或支撑单元遮挡前,产生所述锁止信号。
21、优选的,所述第二检测单元设置于所述摆臂的下方,其输出的测距激光从所述摆臂的下方穿过所述出光孔。
22、优选的,所述摆臂整体为z型结构。
23、优选的,所述第一检测单元包括槽型光电开关。
24、优选的,所述框架由铝型材制成。
25、优选的,所述摆臂的长度、宽度对应大于感应件的长度、宽度,且所述感应件宽度小于出光孔的宽度。
26、优选的,所述激光清洗设备还包括:
27、地轨;
28、地轨滑台,其与所述地轨滑动配合,且可沿所述地轨延伸方向直线移动;
29、以及z向安装座,其连接所述地轨滑台以及z向移动模组。
30、与现有技术相比,本发明具备以下有益效果:
31、本发明中的激光清洗设备结构设计简单,其可以大幅降低使用和制造成本,无需采集过多的定位特征即可完成焊缝跟随,同时可通过碰撞检测组件与底部支撑单元的碰撞程度及时产生锁止信号,避免因误判导致激光清洗模组下移,激光清洗模组撞击底板的情况发生,同时,还可通过上方的摆臂遮挡住飞溅物,避免其对下方的测距激光产生影响,以保证检测结果的准确性。
技术特征:1.一种桥梁波腹板总装箱梁的激光清洗设备,其特征在于,包括:
2.如权利要求1所述的激光清洗设备,其特征在于,所述激光清洗设备还包括:
3.如权利要求1所述的激光清洗设备,其特征在于,所述碰撞检测组件包括:
4.如权利要求3所述的激光清洗设备,其特征在于,所述摆臂与桥梁波腹板总装箱梁下方的支撑单元发生碰撞后,且所述测距激光被摆臂自由悬空的一端或支撑单元遮挡前,产生所述锁止信号。
5.如权利要求3所述的激光清洗设备,其特征在于,所述第二检测单元设置于所述摆臂的下方,其输出的测距激光从所述摆臂的下方穿过所述出光孔。
6.如权利要求3所述的激光清洗设备,其特征在于,所述摆臂整体为z型结构。
7.如权利要求3所述的激光清洗设备,其特征在于,所述第一检测单元包括槽型光电开关。
8.如权利要求3所述的激光清洗设备,其特征在于,所述框架由铝型材制成。
9.如权利要求3所述的激光清洗设备,其特征在于,所述摆臂的长度、宽度对应大于感应件的长度、宽度,且所述感应件宽度小于出光孔的宽度。
10.如权利要求1所述的激光清洗设备,其特征在于,所述激光清洗设备还包括:
技术总结本发明公开了一种桥梁波腹板总装箱梁的激光清洗设备,其包括:Z向移动模组;Y向移动模组,其可在Z向移动模组的驱动下沿Z向移动;激光清洗模组,其可在Y向移动模组的驱动下沿Y向移动,用于输出作用至桥梁波腹板总装箱梁的焊缝的激光光束,以通过激光光束对焊缝进行激光清洗;以及碰撞检测组件,其用于获取其与桥梁波腹板总装箱梁的底板的下表面之间的距离信息,且反馈至Z向移动模组,且在与桥梁波腹板总装箱梁下方的支撑单元发生碰撞时产生锁止信号。本发明无需采集过多的定位特征即可完成焊缝跟随,同时可通过碰撞检测组件与底部支撑单元的碰撞程度及时产生锁止信号,避免因误判导致激光清洗模组下移,激光清洗模组撞击底板的情况发生。技术研发人员:戴腾飞,祁小勇,胡纯,吕威,叶权,吴苶受保护的技术使用者:华工法利莱切焊系统工程有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240725/142186.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表