一种基于视觉的箱内弹袋自动取出装置的制作方法
- 国知局
- 2024-08-05 12:44:50
本技术涉及一种弹药取出装置,具体涉及一种基于视觉的箱内弹袋自动取出装置。
背景技术:
1、报废弹药处理过程中弹药箱经过拆垛和转运,运送至弹药处理系列设备,在经过弹药箱的剪卡扣、弹药箱的翻盖和移取顶上的泡沫工序后,需要将弹药布袋包装的四联弹精准取出,以便于对报废弹药进行下一步的操作。
2、弹药布袋包装的四联弹的取出是对报废弹药处理的首要工序,精准的将弹药从木箱里取出,并将报废弹药放置到指定位置,决定了整个报废弹药销毁处理的基本进程。
3、普通的将弹药布袋包装的四联弹从弹药箱内取出,存在不准确性和失误操作,由此造成的结果将直接影响整个报废弹药销毁处理进程,更严重的可能使报废弹药意外爆炸,造成设备损坏甚至是人员伤亡。
技术实现思路
1、本实用新型通过提供一种基于视觉的箱内弹袋自动取出装置,解决了目前取出装置无法精准控制可能使报废弹药意外爆炸,造成设备损坏甚至是人员伤亡的问题。
2、本实用新型是由以下技术方案实现的:
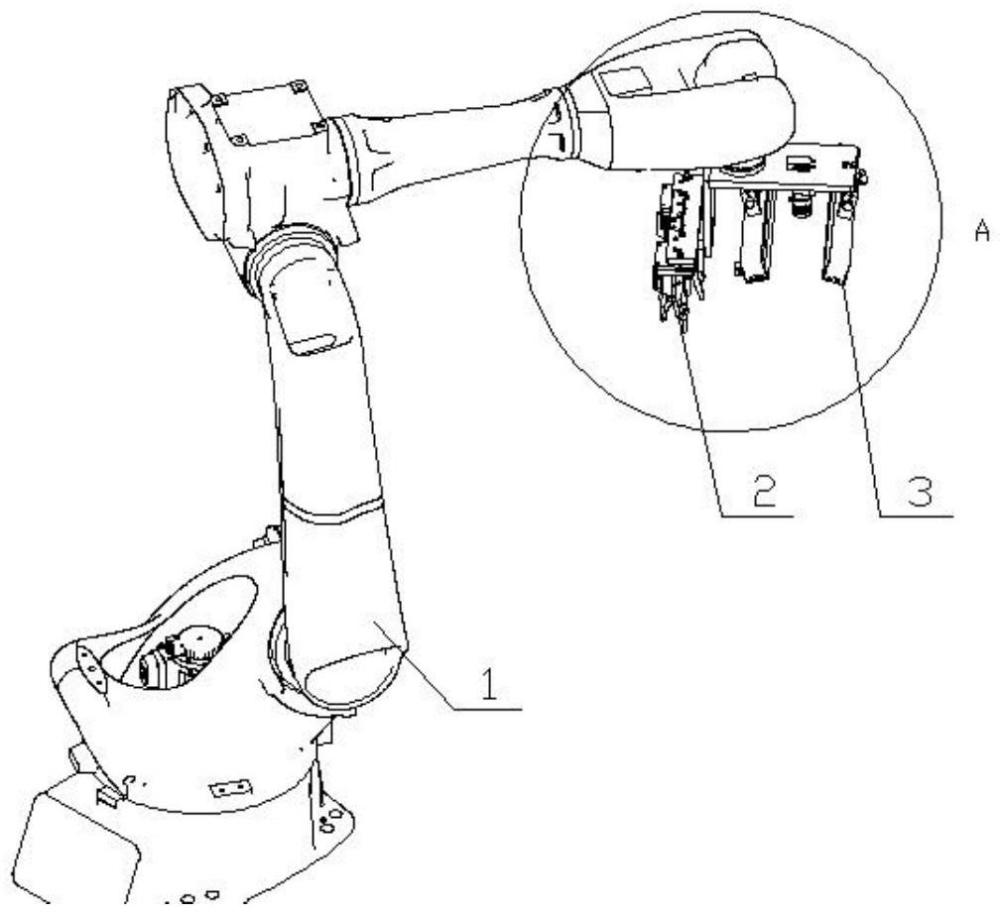
3、一种基于视觉的箱内弹袋自动取出装置,包括取弹袋机器人1、取弹袋夹爪机构2和取弹袋视觉机构3;
4、所述取弹袋视觉机构包括视觉连接固定板3-1、光源调整组件3-2、光源固定件3-3、光源3-4和镜头3-5,视觉连接固定板3-1安装固定在取弹袋机器人1操作端,光源调整组件3-2安装在视觉连接固定板3-1下方,光源固定件3-3安装在光源调整组件3-2下部,光源3-4安装在光源固定件3-3上,镜头3-5安装在视觉连接固定板3-1下方;
5、所述取弹袋夹爪机构2包括夹爪连接固定板2-1、气缸固定和调整组件2-2、气缸2-3、夹爪2-4和限位块2-5;气缸固定和调整组件2-2固定在夹爪连接固定板2-1上,气缸2-3安装在气缸固定和调整组件2-2上,夹爪2-4连接在气缸2-3下端,用于限制弹袋的限位块2-5安装在夹爪2-4上,夹爪连接固定板2-1固定在取弹袋视觉机构3的视觉连接固定板3-1上;
6、工作时,取弹袋机器人1将取弹袋夹爪机构2和取弹袋视觉机构3移动至报废弹药袋上方位置,取弹袋视觉机构3负责识别到四联弹袋在弹药箱内的位置,取弹袋夹爪机构2将四联弹袋从弹药箱内取出,取弹袋机器人1将从弹药箱抓取出来的四联弹袋放置到指定工位,以便于进行下一步报废弹药销毁处理。
7、所述取弹袋机器人1为工业用标准六轴机器人,型号为mr20e-1840。
8、所述取弹袋夹爪机构2的气缸2-3和夹爪2-4的驱动由plc程序控制。
9、本实用新型实现了视觉检测的弹药箱内弹药袋自动取出,具有操作精准、安全性高的特点。
技术特征:1.一种基于视觉的箱内弹袋自动取出装置,其特征是:包括取弹袋机器人(1)、取弹袋夹爪机构(2)和取弹袋视觉机构(3);
2.根据权利要求1所述的一种基于视觉的箱内弹袋自动取出装置,其特征是:所述取弹袋机器人(1)为工业用标准六轴机器人,型号为mr20e-1840。
3.根据权利要求1所述的一种基于视觉的箱内弹袋自动取出装置,其特征是:所述取弹袋夹爪机构(2)的气缸(2-3)和夹爪(2-4)的驱动由plc程序控制。
技术总结本技术通过提供一种基于视觉的箱内弹袋自动取出装置,解决了目前取出装置无法精准控制可能使报废弹药意外爆炸,造成设备损坏甚至是人员伤亡的问题。包括取弹袋机器人(1)、取弹袋夹爪机构(2)和取弹袋视觉机构(3);所述取弹袋视觉机构包括视觉连接固定板(3‑1)、光源调整组件(3‑2)、光源固定件(3‑3)、光源3‑4和镜头3‑5;所述取弹袋夹爪机构(2)包括夹爪连接固定板(2‑1)、气缸固定和调整组件(2‑2)、气缸(2‑3)、夹爪(2‑4)和限位块(2‑5)。本技术实现了视觉检测的弹药箱内弹药袋自动取出,具有操作精准、安全性高的特点。技术研发人员:郎韶华,董星,林智辉,张辉,刘咏才,吴海山,刘锐,盛文正,张飞,陈林涛,何鹏涛,莫超亮受保护的技术使用者:中国融通资源开发集团有限公司技术研发日:20231225技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/264208.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表