一种盾构机自动同步注浆控制方法与流程
- 国知局
- 2024-07-27 10:32:26
本发明涉及盾构机用同步注浆领域,具体涉及一种盾构机自动同步注浆控制方法。
背景技术:
1、盾构施工时管片的铺设以及壁后注浆的好坏直接影响着隧道的紧固程度,这就使得盾构机需要配备良好的注浆控制系统,保证壁后注浆的均匀无空洞。传统施工中主要有手动注浆和自动注浆两种方式,手动是根据施工人员自己经验决定注浆的量和注浆压力,这就很容易造成注浆较大的偏差;自动注浆时通过设定注浆系统的注浆压力来进行控制注浆,当达到一定压力时停止注浆,这种方法参考指标太少,很容易造成注浆不均匀以及空洞的产生。上述的方法通过单一的注浆压力控制注浆,根据单一注浆压力很难判断出注浆是否足够,容易造成注浆较大偏差和注浆不均匀。
技术实现思路
1、本发明意在提供一种盾构机自动同步注浆控制方法,以解决目前通过单一注浆压力值进行控制注浆,很难控制注浆量,容易导致注浆偏差大和注浆不均匀的问题。
2、为达到上述目的,本发明采用如下技术方案:一种盾构机自动同步注浆控制方法,包括以下步骤:
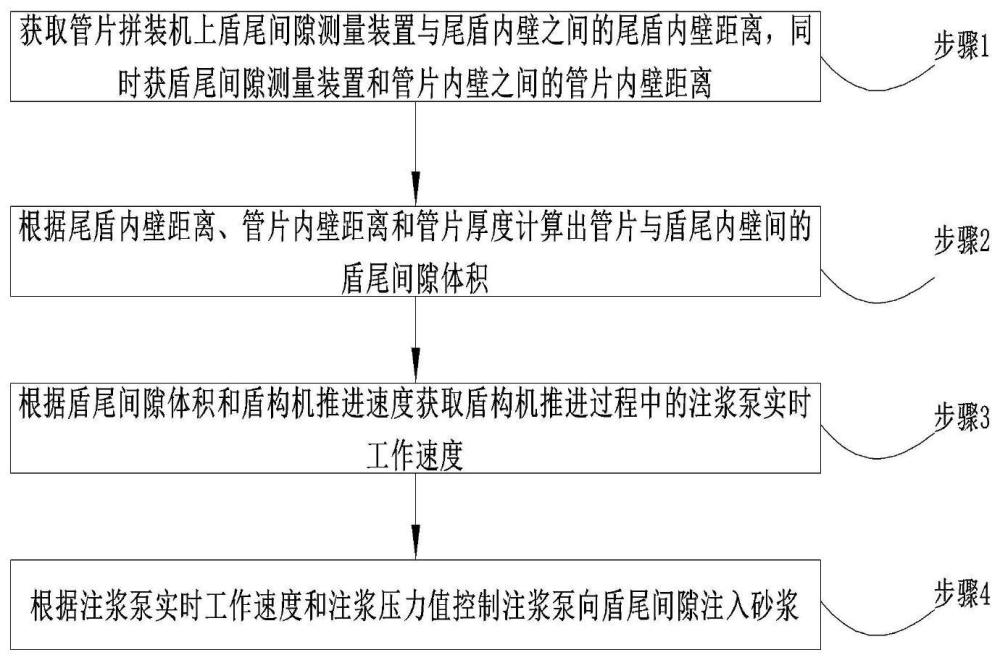
3、步骤1:获取管片拼装机上盾尾间隙测量装置与尾盾内壁之间的尾盾内壁距离,同时获盾尾间隙测量装置和管片内壁之间的管片内壁距离;
4、步骤2:根据尾盾内壁距离、管片内壁距离和管片厚度计算出管片与盾尾内壁间的盾尾间隙体积;
5、步骤3:根据盾尾间隙体积和盾构机推进速度获取盾构机推进过程中的注浆泵实时工作速度;
6、步骤4:根据注浆泵实时工作速度和注浆压力值控制注浆泵向盾尾间隙注入砂浆。
7、优选的,所述步骤3具体包括:根据盾尾间隙体积和盾构机推进速度计算注浆泵需注入砂浆体积量,并根据公式v1=n×l×s获取注浆泵活塞单次往返次数,其中,v1为注浆总量,n为活塞往返次数,l为注浆泵单次冲程,s为注浆活塞的横截面积;然后根据注浆泵活塞单次往返次数获得推进过程中注浆泵实时工作速度。
8、优选的,所述步骤4中获取注浆泵注浆过程中的注浆速度值和注浆压力值,然后根据注浆速度值、注浆压力值、注浆泵实时工作速度和注浆压力预设阈值进行调整注浆泵注浆过程中的注浆速度和注浆压力。
9、优选的,所述步骤4中注浆泵的注浆速度大于推进过程中注浆泵实时工作速度所要求的注浆量,且注浆压力值等于或大于预设注浆压力阈值的预设百分比值时,则调低注浆速度直至注浆压力小于注浆压力阈值的预设增量,所述预设百分比大于100%。
10、优选的,所述步骤4中注浆泵的注浆速度大于推进过程中注浆泵实时工作速度所要求的注浆量,且注浆压力值小于预设注浆压力阈值时,则调高注浆速度直至注浆压力值大于或者等于预设注浆压力阈值。
11、优选的,所述步骤4中注浆压力值大于或等于预设注浆压力阈值且小于预设注浆压力阈值的预设百分比值时,且所述注浆速度小于推进过程中注浆泵实时工作速度所要求的注浆量时,则调整注浆速度与盾构机推进速度相匹配,使注浆量和推进过程中注浆泵实时工作速度所要求的注浆量相同;所述预设百分比大于100%。
12、优选的,所述盾尾间隙测量装置包括激光测距仪,所述激光测距仪均匀安装在管片拼装机的外周,所述激光测距仪的安装角度和尾盾注浆管路角度相对应。
13、优选的,所述步骤4中注浆泵通过多组均匀分布在尾盾中的注浆管路向盾尾间隙注入砂浆。通过多组管路对盾尾间隙进行均匀注浆,保障注浆质量和加快注浆速度。
14、优选的,所述步骤2具体包括:根据尾盾内壁距离值、管片内壁距离值和管片厚度值,判断出数值对应表示的参数,再将相应参数的数值进行运算获得管片与盾尾内壁间的盾尾间隙体积。
15、优选的,所述步骤1具体包括:首先通过盾尾间隙测量装置读取盾尾间隙测量装置与尾盾内壁之间的尾盾内壁距离,然后移动盾尾间隙测量装置读取盾尾间隙测量装置和管片内壁之间的管片内壁距离。
16、本方案通过将盾尾间隙测量和砂浆计量加入注浆控制系统中,通过盾尾间隙测量装置计算出盾尾间隙,从而计算出壁后间隙体积,再通过砂浆量计算注入砂浆体积,在盾构机推进过程中实时比较砂浆注入体积与壁后间隙体积差值,动态调整注浆速度,在结合参考注浆压力就可准确的控制注浆量,实际上注浆总量v可以稍大于推进速度要求的注浆量,适当增大注浆量,可以用于判断是否产生了壁后空洞或孔洞,如果注浆量达到v,此时浆液从顶部注浆口少量溢出,可以判断已经充分注浆,如果注浆总量还没有达到v,但顶部注浆口大量溢出了,则推测可能是产生空洞了,如果注浆量达到v了,此时浆液仍未从顶部注浆口溢出,则判断壁后可能有漏浆的孔洞,再及时调整注浆量或采取其它应急措施;通过盾构机的推进速度来获取推进过程中的注浆泵实时工作速度,再根据此速度调整注浆速度,达到盾构机同步注浆的目的,保障盾构机工作效率和注浆速度与质量。
技术特征:1.一种盾构机自动同步注浆控制方法,包括以下步骤:
2.根据权利要求1所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤3具体包括:根据盾尾间隙体积和盾构机推进速度计算注浆泵需注入砂浆体积量,并根据公式v1=n×l×s获取注浆泵活塞单次往返次数,其中,v1为注浆总量,n为活塞往返次数,l为注浆泵单次冲程,s为注浆活塞的横截面积;然后根据注浆泵活塞单次往返次数获得推进过程中注浆泵实时工作速度。
3.根据权利要求1所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤4中获取注浆泵注浆过程中的注浆速度值和注浆压力值,然后根据注浆速度值、注浆压力值、注浆泵实时工作速度和注浆压力预设阈值进行调整注浆泵注浆过程中的注浆速度和注浆压力。
4.根据权利要求3所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤4中注浆泵的注浆速度大于推进过程中注浆泵实时工作速度所要求的注浆量,且注浆压力值等于或大于预设注浆压力阈值的预设百分比值时,则调低注浆速度直至注浆压力小于注浆压力阈值的预设增量,所述预设百分比大于100%。
5.根据权利要求3所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤4中注浆泵的注浆速度大于推进过程中注浆泵实时工作速度所要求的注浆量,且注浆压力值小于预设注浆压力阈值时,则调高注浆速度直至注浆压力值大于或者等于预设注浆压力阈值。
6.根据权利要求3所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤4中注浆压力值大于或等于预设注浆压力阈值且小于预设注浆压力阈值的预设百分比值时,且所述注浆速度小于推进过程中注浆泵实时工作速度所要求的注浆量时,则调整注浆速度与盾构机推进速度相匹配,使注浆量和推进过程中注浆泵实时工作速度所要求的注浆量相同;所述预设百分比大于100%。
7.根据权利要求1所述的一种盾构机自动同步注浆控制方法,其特征在于:所述盾尾间隙测量装置包括激光测距仪,所述激光测距仪均匀安装在管片拼装机的外周,所述激光测距仪的安装角度和尾盾注浆管路角度相对应。
8.根据权利要求1所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤4中注浆泵通过多组均匀分布在尾盾中的注浆管路向盾尾间隙注入砂浆。
9.根据权利要求1所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤2具体包括:根据尾盾内壁距离值、管片内壁距离值和管片厚度值,判断出数值对应表示的参数,再将相应参数的数值进行运算获得管片与盾尾内壁间的盾尾间隙体积。
10.根据权利要求1所述的一种盾构机自动同步注浆控制方法,其特征在于:所述步骤1具体包括:首先通过盾尾间隙测量装置读取盾尾间隙测量装置与尾盾内壁之间的尾盾内壁距离,然后移动盾尾间隙测量装置读取盾尾间隙测量装置和管片内壁之间的管片内壁距离。
技术总结本发明涉及盾构机用同步注浆领域,公开了一种盾构机自动同步注浆控制方法,步骤1:获取尾盾内壁距离和管片内壁距离;步骤2:根据尾盾内壁距离、管片内壁距离和管片厚度计算出管片与盾尾内壁间的盾尾间隙体积;步骤3:根据盾尾间隙体积和盾构机推进速度获取盾构机推进过程中的注浆泵实时工作速度;步骤4:根据注浆泵实时工作速度和注浆压力值控制注浆泵向盾尾间隙注入砂浆。本方案通过将盾尾间隙测量和砂浆计量加入注浆控制系统中,计算出盾尾间隙,在盾构机推进过程中实时比较砂浆注入体积与壁后间隙体积差值,动态调整注浆速度,在结合参考注浆压力就可准确的控制注浆量,避免漏注、少注的情况,减少壁后孔洞,保障注浆质量。技术研发人员:许磊,乔俊伟,姚磊,姜晓彤,李呈伟受保护的技术使用者:济南重工股份有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240726/113898.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表