一种自导引修井作业集成平台及其操作方法与流程
- 国知局
- 2024-07-27 10:33:43
本发明属于石油钻修井设备,涉及一种自导引修井作业集成平台及其操作方法。
背景技术:
1、国内油田修井作业中85%为小修作业,在小修作业中起、下管是高频率作业。传统修井作业需要4人协作、轮流交换,油杆管的上卸扣靠人工手动联合作业,上下油杆管靠人工拖行搬运,现场打地猫和安装绷绳,费时费力。同时,工作环境恶劣,经受严寒酷暑、风吹日晒,工人劳动强度大,井口作业风险度高,安全事故多。
2、上世纪九十年代国内对修井自动化技术的研究,形成了一定的研究成果,如多用途油管卡盘、气动卡瓦、筒式吊卡、油管举升器、油管扶正器和机械式排拉油管装置等,随着二十一世纪自动化、智能化技术的发展,对修井设备的自动化,集成化程度要求也越来越高,目前初步实现了地面送管、悬吊、上卸扣、高空排管等系统的自动化作业,作业人员由原来的5-7人减少到3人,但自动化设备只在原有人工作业的基础上改进,采用模块加装方式,设备的尺寸、重量偏大,油田作业场地摆放、道路转场困难;各设备间相对独立,自动化集成度低,各模块协调性差,现场连接调试时间长,整体效率较低。
技术实现思路
1、本发明的目的在于克服现有技术中存在的缺陷,提供一种自导引修井作业集成平台及其操作方法,将小修作业起、下杆管的工艺流程设备一体化集成,通过修井作业协同控制技术,解决修井工作中工作效率低、作业成本高、可靠性差、核心技术依赖性大、人员劳动强度大、安全风险高等难题。是实现“一键式”修井自动化作业工艺的基础。
2、本发明的实施例是这样实现的:
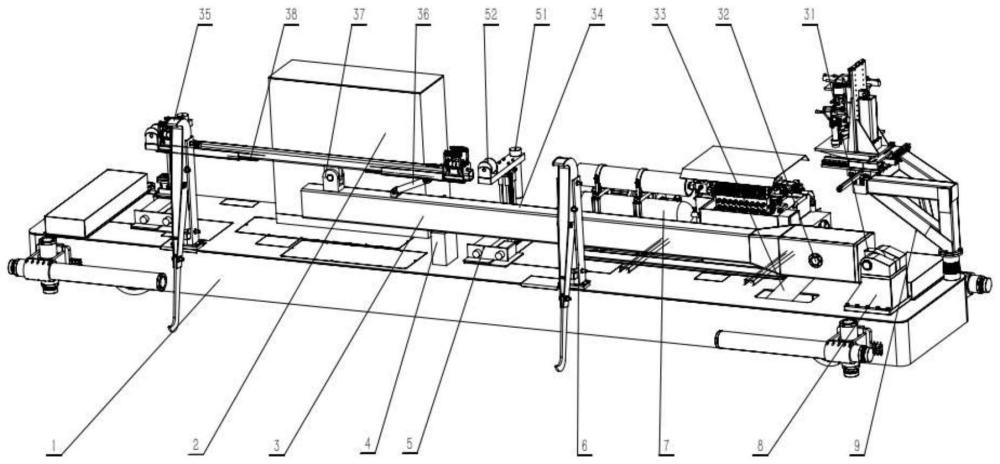
3、一方面,本发明的实施例提供了一种自导引修井作业集成平台,包括自导引行走系统及集成于自导引行走系统车架底盘上的电控柜,上下钻台翻转臂,固定座,主臂限位块,运管转接,地面翻转臂,液压集成站。
4、进一步,自导引行走系统用于集成、升降和行驶,电控柜是控制各部件电控设施的控制系统,用于控制修井作业各部件的运行,位于自导引修井作业集成平台的左后部位;液压集成站是提供液压动力的动力系统,位于自导引修井作业集成平台的左前部位;上下钻台翻转臂,运管转接,地面翻转臂,自适应井口杆管钳是实现修井起下杆管的执行系统部件。
5、再进一步,上下钻台翻转臂位于平台中部,通过固定座的铰接与自导引修井作业集成平台相连,固定座位于平台的中部前端,焊接固定在底盘上,作业时,上下钻台翻转臂对中井口;主臂限位块位于平台中部,主臂下方,支撑主臂水平放置;运管转接与地面翻转臂分布于上下钻台翻转臂的两侧,地面翻转臂位于自导引修井作业集成平台前方正对井口的右侧;自适应井口杆管钳位于自导引修井作业集成平台车的左前端;平台车自导引修井作业集成平台通过控制系统、升降系统和执行系统的相互配合,能够实现井口无人化的自动起下杆管作业。
6、进一步,自导引行走系统由车架底盘、舵轮总成、从动轮总成、工作支撑装置等组成。
7、进一步,其中舵轮总成、从动轮总成内有驱动转向轮组、伺服驱动转向装置、胶轮内置减速电机轮毂、伺服驱动电机;plc通过控制液压转向机构来实现平车的前后直行、左右转向和横移,通过控制伺服驱动转向机构来实现驱动回转;内置减速机、伺服驱动电机的聚氨酯橡胶轮胎,由plc及扩展模块实现速度控制;工作支撑装置是均布、对称于车架底盘短边的四角侧端,自带液压伸缩臂及液压伸缩臂端头的液压支撑臂和升降臂,液压伸缩臂和升降臂互相垂直,液压伸缩臂由液压伸缩缸实现臂的伸缩;液压支撑臂和升降臂通过液压马达和行星减速机驱动进行工作状态的转换,并可通过液压支撑臂,调整作业平台水平状态;平台短边对应两端伸缩臂伸出极限大于3米,升降臂着地后,作业平台高度最大可达到1.3米。通过伸缩臂和升降臂的联合作用,自行上、下装载车,可无需大吊装卸。
8、本发明的自导引行走系统具备直行、拐弯、横移、斜移、原地回转等功能,在野外作业可实现到所需要作业位置的精确移动;运输便捷。
9、修井平台的自动控制系统实现整体化集成控制,将修井平台各部分机械装备、液压系统、监控系统、和数据处理设备相互联结构成了一体化的系统,具备下位机开关控制、遥控盒控制和上位机自动控制三级控制功能,下位机、遥控盒控制集成单一模块的自动控制,上位机控制系统集成了控制系统和各个模块的子控制系统之间的联系,其工业控制模式:上位机组态软件+下位机plc控制模式。
10、液压集成站提供液压动力的动力系统,集成各个模块的液压子系统,采用了液压总线方针,根据各个模块的工艺特点、工作过程中的负载特性和速度的差异化需求,液压阀块的优化布局,规划搭建整个液压系统。
11、进一步,上下钻台翻转臂:运输杆管上下钻台面,对中井口作业的装置,由主臂、主臂起升液缸、副臂、副臂调节液缸、电控夹爪组成;主臂的前端耳板与底盘固定座铰接相连,通过主臂起升液缸的伸缩可以在工作设定角度旋转;主臂起升液缸伸缩端与主臂的前端部铰接,主臂起升液缸缸筒底端与自导引修井作业集成平台底盘铰接连接;副臂的中端与主臂的后端铰链连接,副臂的两端安装有电控夹爪,电控夹爪的开口向上;在主臂、副臂之间安装副臂调节液缸,分别与主臂、副臂铰接。
12、进一步,固定座的耳板连接处,与主臂连接口是水平开口,使主臂可以水平放置,另一端是限位口,能机械限位主臂翻转角度。
13、进一步,运管转接:通过plc可编程模块精确的自动定位水平-垂直移送杆管的电控装备,由电控水平-垂直移运装置和移运杆管滚轮组成。
14、进一步,地面翻转臂:是将现场管排架杆管抓取移运到平台上的装置,由支撑座、举升液缸、翻转臂、连接于翻转臂前端的抓勾、及连接各组件的连接销组成;翻转臂的一头是弯弧槽,为上部,由上向下是由宽到窄的平面,侧面是有一定宽度侧板,侧板由上而下有三组对称孔;支撑座是由中空对称的两个竖直板焊接于一块底板上组成,底板由螺栓固定于平台底盘上,支撑座的竖直板上有上下两组对称孔,分别通过销轴连接翻转臂的上端和液缸的下端耳板;液缸的上部耳板通过销轴连接于翻转臂的中上部销孔;翻转臂的下端孔通过销轴与抓勾相连;抓勾是一个尾部带勾状的长柄。
15、进一步,自适应井口杆管钳:是可以旋转定位,并能进行三维自适应自动对中井口的自动化上卸扣杆管钳,由杆管支撑架和自动上卸扣杆管钳组成。其中杆管支撑架有旋转轴、自适应支撑座和对中扶持机械手三个功能部分;旋转轴置于底盘车的左前部导孔内,内有自锁装置;自适应支撑座与旋转轴通过法兰盘连接,自适应支撑座结构通过plc可编程控制器能达到三维自适应自动对中井口,对中扶持机械手位于自适应支撑座的对中井口的上部,下部安装自动上卸扣杆管钳,上下两部分组成对中井口杆管上卸扣工作面。
16、另一方面,本发明的实施例提供了一种自导引修井作业集成平台的操作方法,包括以下步骤:
17、包括以下步骤:
18、步骤1、运输装卸:一种自导引修井作业集成平台的自导引行走系统的四个伸展臂伸出大于拖车底盘宽每边20mm,举升至胶轮底部高于拖车底盘10mm,可置于拖车上方进行伸缩、升降,达到自行装卸的功能;
19、步骤2、作业位及准备:依据作业位的井口环境及路途状态,自导引行走系统可进行直行、拐弯、横移、斜移、原地回转等功能,精确移动到所需要作业位置的;使上下钻台臂对中井口,伸出自导引行走系统液压支撑臂,调整至自导引行走系统胶轮底部触地但不承压,车架底盘水平。
20、步骤3、下管作业工艺过程:举升地面翻转臂举升液缸,将地面杆管桥上钩住的杆管,沿翻转臂滚入顶部的圆弧槽;电控水平-垂直移运装置移动至翻转臂的圆弧槽下方,垂直举升取出翻转臂圆弧槽中的杆管,退离翻转臂的圆弧槽;翻转臂收回举升液缸,回到地面勾管状态;同时,打开电控夹爪,电控水平-垂直移运装置将移运杆管送入电控夹爪中后退回至起始位,电控夹爪夹持杆管;主臂升降液缸伸出,举升主臂至井口中心位,伸缩副臂调节液缸,至副臂夹持的杆管垂直对中井口;井口上端大吊下降夹持住杆管上端,自适应井口杆管钳移动至井口,其对中机械手扶持杆管,打开电控夹爪,收缩主臂升降液缸、退回上下钻台臂,同时收缩副臂调节液缸,至上下钻台臂到初始位,进行下一根杆管的移运;而与此同时吊卡下放杆管至接箍完全对扣,自动上卸扣杆管钳上扣完成,对中机械手和自动上卸扣杆管钳退回,吊卡下入杆管后起升回最初高位。
21、步骤4、起管作业工艺过程:当吊卡将起出油管吊出井口卸扣位时,自适应井口杆管钳移动对中机械手夹持杆管、自动上卸扣杆管钳至井口,完成卸扣,吊卡将杆管吊离接箍位;同时主臂升降液缸伸出,举升主臂至井口中心位,伸缩副臂调节液缸,至副臂夹持的杆管垂直对中井口;副臂电控夹爪夹持杆管,打开吊卡,起升吊卡离开杆管,缩回主臂升降液缸,离开井口、收缩副臂调节液缸,至副臂与主臂平行,回到主臂起始位;电控水平-垂直移运装置移至杆管的下方,垂直举升至杆管高出电控夹爪后水平退离,伸出主臂升降液缸举升主臂,同时举升地面翻转臂至圆弧槽翻转到最下端,移动电控水平-垂直移运装置至杆管置于翻转臂圆弧槽中,垂直下降电控水平-垂直移运装置脱离杆管后退回;缩回地面翻转臂举升液缸,杆管从翻转臂圆弧槽沿翻转臂端面至抓勾,移送到地面油管桥;与此同时,井口已在进行下一根杆管的移运。
22、本发明实施例的有益效果是:
23、本发明提供了一种自导引修井作业集成平台及其操作方法,具有运输装卸自动化、运行智能化、上装集成一体化、作业状态自适应的功能。自导引式行走系统解决了现场场地小,运输装卸困难的难题,同时智能行走可实现丛式井作业的灵活性。集成的一体化修井装备提高了修井作业自动化水平,实现了井口无人化作业,降低了安全风险,提高了劳动效率。
本文地址:https://www.jishuxx.com/zhuanli/20240726/114000.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表