一种螺杆驱动式钻孔围岩裂隙探测机器人及探测方法
- 国知局
- 2024-07-27 10:55:09
本发明属于探测,涉及一种螺杆驱动式钻孔围岩裂隙探测机器人及探测方法。
背景技术:
1、随着地下工作面的推进,频繁的工程扰动,围岩中不仅有大量隐蔽的原生裂隙,同时深部钻孔处于高地压、强扰动的复杂工程环境中,易导致钻孔围岩产生裂隙。裂隙在岩体中的赋存有较大的随机性,常常需要使用注水测漏失量的方法来探测钻孔裂隙的发育程度,即通过钻机向钻孔围岩一定距离内打孔,选取封闭钻孔的某一长度区段并向其注水,水向裂隙通道渗透,通过控制注水压力和量测注水量判断注水是否达到饱和,根据达到饱和时的实际注水量,即漏失量,判断钻孔围岩中的裂隙空间大小,从而得出裂隙的发育程度。
2、现有的双端封堵围岩裂隙带探测技术中(例如申请号为:201510903125.x,申请日期为:2015.12.09;申请号为cn201620279944.1,申请日期为:2016.04.07),均需要人工使用钻机辅助、钻杆支撑将探测设备逐段推送至探测预定位置,对深度大、距离远的探测点需要耗费大量的人力、物力、财力,钻孔内经常残留破碎岩石会阻碍探测装置,另外也会扎破气囊,工作现场大量钻杆堆积,施工强度大,且不能对封堵段内水的分布情况进行监测,只能测得封堵断是否存在裂隙,无法观测到围岩裂隙发育真实情况,并需要人工操作进出水、进出气等装置,使用极不便利。
技术实现思路
1、本发明的目的在于克服现有技术存在的缺点,设计提供一种螺杆驱动式钻孔围岩裂隙探测机器人及探测方法,该装置能初步检测钻孔内的大致情况,提高探测效率,并利用成像仪获取封堵段内钻孔围岩裂隙发育特征,实现对特定位置的裂隙的具体位置及大小进行探测,能够极大程度的简化设备、降低工人劳动强度,加快工程进度,实现自动化围岩裂隙探测。
2、为实现上述目的,本发明所采用的技术方案是:
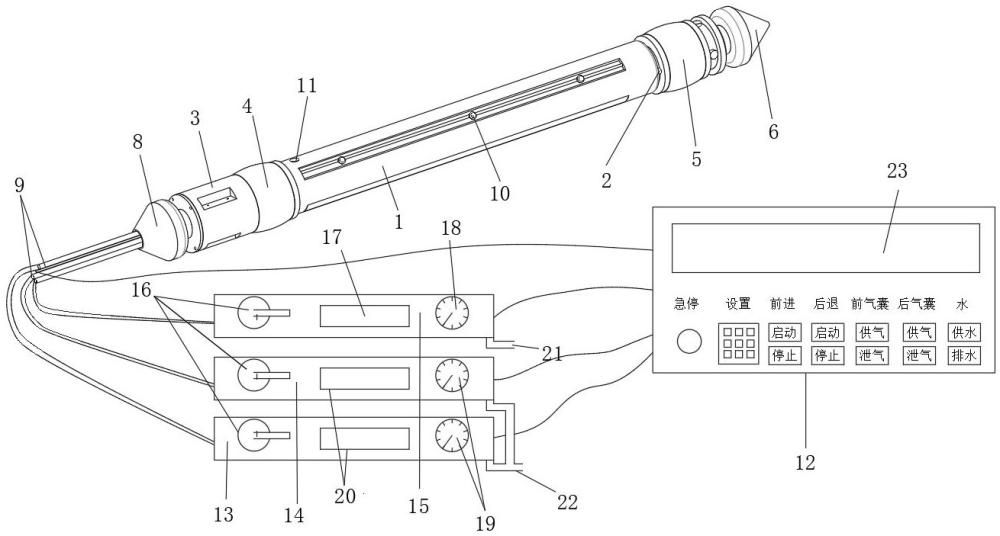
3、一种螺杆驱动式钻孔围岩裂隙探测机器人及探测方法,包括有外驱动杆和内驱动杆;其中:外驱动杆的后部外部安装有后气囊,外驱动杆的后端内部安装有空心轴电机,空心轴电机的输出端通过螺栓安装有螺纹驱动轴,外驱动杆的后端部通过螺栓安装有后空心钻头;外驱动杆的前端内部滑动式安装有带有内螺纹的内驱动杆,内驱动杆与螺纹驱动轴螺纹连接;内驱动杆的前部外部安装有前气囊,内驱动杆的前端部通过螺栓安装有前钻头;管线组件贯穿后空心钻头后安装于外驱动杆或内驱动杆中。
4、进一步的,外驱动杆的后部为电机支座,电机支座的前部为后气囊安装部,后气囊安装部外部安装有后气囊;后气囊安装部上设置有后气囊充气孔,后气囊充气孔连通于空心轴电机安装腔体,后气囊安装部的前部为主驱动杆,主驱动杆的前端内部安装有内驱动杆。
5、进一步的,电机支座的内部设置有空心轴电机安装腔体,电机支座的外周设置有四组空心轴电机安装孔,空心轴电机安装孔贯穿于电机支座;空心轴电机放置于空心轴电机安装腔体后,通过长螺杆将空心轴电机固定于空心轴电机安装腔体中;空心轴电机安装腔体的底部设置有注水管孔;空心轴电机安装腔体的前部设置有探测探头排线孔。
6、进一步的,主驱动杆的外部设置有呈凹型状的探测探头排线槽,探测探头排线槽的内部设置有多个探测探头安装槽,探测探头安装槽中安装有探测探头,探测探头安装槽上安装有探测探头玻璃罩。
7、进一步的,主驱动杆的外部设置有直线状的注水口,注水口贯穿于主驱动杆;主驱动杆的内部设置有第一凹型导轨和第一凸型导轨。
8、进一步的,内驱动杆的外部上下两侧设置有第二凹型导轨,内驱动杆的外部左右两侧设置有第二凸型导轨,内驱动杆前端设置有前气囊安装部,前气囊安装部上安装有前气囊,前气囊安装部上设置有一前气囊充气孔,前气囊充气孔连通于内驱动杆的内部;内驱动杆的内部设置有内螺纹;前气囊安装部的前部外周还设置有四组摄像头。
9、进一步的,水具有重量,所以只能通过在设备上添加压力传感器,来检测注水的实际水压,水源通过外接供水装置提供,水压值可以在外接显示控制台上显示。
10、进一步的,管线组件包括有前气囊充气管、后气囊充气管、注水管和探测探头排线;前气囊充气管连通于前气囊充气孔,为前气囊充气;后气囊充气管连通于后气囊充气孔,为后气囊充气;注水管连通于注水管孔;探测探头排线安装于探测探头排线孔中,并连接于摄像头和探测探头。
11、进一步的,供水系统包括注水管与供水装置,注水管外接供水装置,从左到右依次设置有电子阀门、水量流量表、水压表,靠近电子阀门的一端连通注水管,靠近水压表的一端连通有高压水源。
12、进一步的,供气系统包括前气囊充气管、后气囊充气管、前气囊供气装置、后气囊供气装置,充气管外接供气装置,前、后气囊充气管分别外接两个供气装置,从左到右依次设置有电子阀门、气体流量表、气压表,靠近电子阀门的一端连通充气管,靠近气压表的一端连通有高压气源。
13、进一步的,控制台控制着整个设备的运行,包括监测气压、水压,设备运行状态。急停按键功能为装置出现状况时的保护;设置按键用于设置压力,如气囊压力和注水压力参数;前进按键控制空心轴电机的转动,后退按键控制空心轴电机反向转动;前、后气囊供气按键控制气囊充气固定装置,泄气按键控制前、后气囊收缩,共同控制装置的前进及封堵作用;供水与排水按键控制注水与排水。
14、本发明对于钻孔围岩裂隙探测的具体方法为:
15、(1)将前气囊供气装置、后气囊供气装置接入高压气源,供水装置接入高压水源,压力传感器处于卸压状态,将裂隙探测装置放入提前打好的钻孔内;
16、(2)按下控制台的后气囊供气按键控制后气囊充气装置通过后气囊充气管对后气囊充气,通过压力传感器判断充气情况,当压力值达到预设压力值时,自动关闭充气,达到后气囊固定住装置的后端的效果,启动空心轴电机,空心轴电机通过螺纹驱动轴带动内驱动杆前进,前钻头会对障碍区进行清除;
17、(3)到达设定距离后,按下控制台的前气囊供气按键控制前气囊充气装置通过前气囊充气管对前气囊充气使得前气囊将装置前端固定住,此时按下控制台的后气囊泄气按键控制后气囊通过后气囊充气管泄气,反向转动空心轴电机,使得外驱动杆前进,以此不断向前,到达设定探测的位置;
18、(4)到达指定位置点后,内、外驱动杆均回到初始位置,按下前、后气囊供气按键控制前、后气囊均充气,达到预设压力值后,自动停止充气,确保装置固定不滑落,完成孔段封堵;
19、(5)按下控制台的注水按键控制注水装置通过注水管对封堵区域注水,同时控制台获取水流量信号并将水流信息在显示在控制台数据显示器,当孔段水满,流量稳定后,记录控制台数据显示器所显示的流量值与流速值,并通过检测探头对此段的裂隙情况进行检查;
20、(6)完成此段裂隙探测工作后,按下控制台的后气囊泄气按键控制后气囊收缩,孔段内注水泄出,反向转动空心轴电机,使得外驱动杆前进,不断重复上述工作,继续进行堵孔注水观测,直至结束全空观测。在观测中,注意气囊封堵与注水是否密封,发现问题及时排除;
21、(7)后退与前进模式相反,后空心钻头会对障碍物进行清除,装置移出钻孔,以便再次利用。
22、本发明与现有技术相比,其优点在于:
23、本发明能提高探测钻孔围岩效率,较为准确的反映出裂隙的发育情况及位置,实现对特定位置的裂隙探测,能够提高工程进度,减少钻孔不稳定性所带来的安全隐患问题,也能用于隧道裂隙岩体、覆岩层裂隙探测。
本文地址:https://www.jishuxx.com/zhuanli/20240726/116479.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表