一种基于分中法人工复测的过站前后盾构机姿态测量控制方法与流程
- 国知局
- 2024-07-27 10:55:13
本发明涉及盾构机姿态测量控制领域,特别涉及一种基于分中法人工复测的过站前后盾构机姿态测量控制方法。
背景技术:
1、现有电力隧道小盾构机控制测量施工的主要方法是盾构机始发前必须对本标段内的卫星定位控制网和地面精密导线网、高程控制网进行复测,将联系测量井上控制点带入其中,做始发联系测量,确定始发起算边,盾构机施工期间每三个月对地面控制网及联系测量进行复测,洞内延伸导线控制网每延伸一个控制点必须以始发控制边为起始进行导线复测,到达前必须进行盾构机姿态人工复测(盾构机特征点测量),对盾构机姿态与导向系统显示姿态进行检核。
2、盾构机掘进期间进行管片姿态人工测量,对比导向系统显示姿态与实测管片姿态的偏差,盾构机掘进移站测量时,应从隧道内控制点采用导线法进行人工引测,采用支导线或极坐标法进行复核,同时对比移站前后盾构机姿态数据的变化。
3、盾构机区间隧道贯通前进行不少于四次联系测量工作,分别在盾构机始发前、隧道掘进中部、距离贯通前分别进行一次,测量精度必须满足规范要求,较长隧道中部每隔一段增加一次联系测量;区间长度过长必须加测陀螺边进行隧道方位角校正。
4、由上述可知,现有电力隧道小盾构机控制测量施工存在始发控制边没有条件布设长边,外加盾构机区间过长,隧道内径过小、曲线半径过小,坡度过大,洞内控制点过于繁多,导线控制网累计误差较大,难以确保洞内控制点的准确性,导致盾构机姿态及方位难以控制的问题。
5、为此,如何提供一种保证洞内导线方位的准确性,盾构机姿态的正确性,更好的制定盾构机姿态的纠偏数据,指导掘进,直至顺利贯通的基于分中法人工复测的过站前后盾构机姿态测量控制方法是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提出了一种基于分中法人工复测的过站前后盾构机姿态测量控制方法。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,包括:
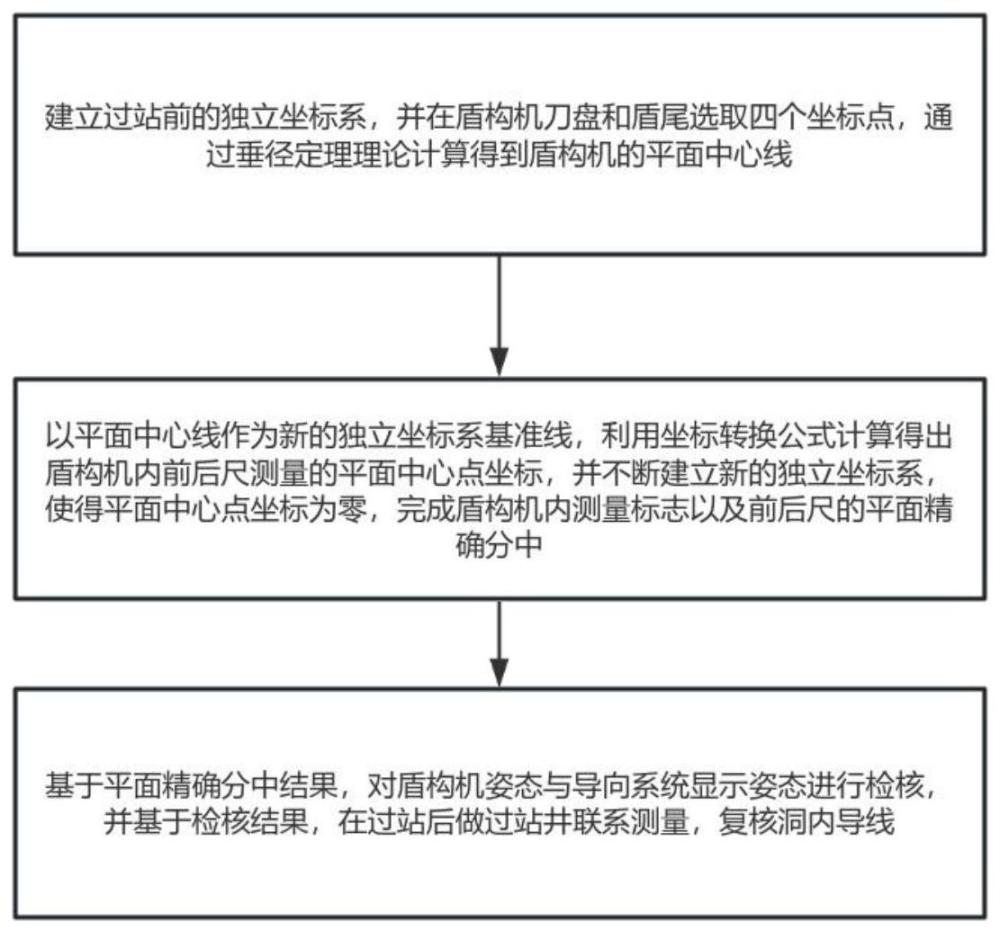
4、步骤1:建立过站前的独立坐标系,并在盾构机刀盘和盾尾选取四个坐标点,通过垂径定理理论计算得到盾构机的平面中心线;
5、步骤2:以平面中心线作为新的独立坐标系基准线,利用坐标转换公式计算得出盾构机内前后尺测量的平面中心点坐标,并不断建立新的独立坐标系,使得平面中心点坐标为零,完成盾构机内测量标志以及前后尺的平面精确分中;
6、步骤3:基于平面精确分中结果,对盾构机姿态与导向系统显示姿态进行检核,并在过站后做过站井联系测量,复核洞内导线。
7、可选的,还包括,将洞内延伸导线布设为双导线,进行双导线复测。
8、可选的,步骤1中,建立过站前的独立坐标系,并在盾构机刀盘和盾尾选取四个坐标点,通过垂径定理理论计算得到盾构机的平面中心线,具体为:
9、步骤1-1:以点x-y建立一个独立坐标系,再点x架设测量仪器,测出切口圆弧上点a(xa,ya,za)、b(xb,yb,zb)两点的三维坐标,使得za=zb,弦长ab为水平弦;测出盾尾圆弧上点c(xc,yc,zc)、d(xd,yd,zd)两点的三维坐标,使得zc=zd;
10、步骤1-2:基于垂径定理:弦的垂直平分线经过圆心,得出o1-e⊥ab,o2-f⊥cd,并计算o1点和o2点的平面坐标:o1(xo1,yo1),其中,xo1=(xa+xb)/2,yo1=(ya+yb)/2;o2(xo2,yo2),其中,xo2=(xc+xd)/2,yo2=(yc+yd)/2;
11、步骤1-3:以直线o1-o2作为盾构机的平面中心线;其中,o1为切口平面中心点;o2为盾尾平面中心点。
12、可选的,步骤2中,以平面中心线作为新的独立坐标系基准线,利用坐标转换公式计算得出盾构机内前后尺测量的平面中心点坐标,并不断建立新的独立坐标系,使得平面中心点坐标为零,完成盾构机内测量标志以及前后尺的平面精确分中,具体为:
13、步骤2-1:在盾构机壳体内,以盾构机的平面中心线o1-o2为基准,m-o2-n为轴线建立独立坐标系,并在点y架设测量仪器,点x为后视,测出盾构机内前、后尺测量标志的坐标点o3(xo3,yo3)和o4(xo4,yo4);
14、步骤2-2:利用坐标转换公式进行如下计算:
15、mo3=xo2+xo3*cos(α)-yo3*sin(α);
16、no3=xo2+xo3*cos(α)-yo3*sin(α);
17、其中,α为平面中心线o1-o2在原坐标系中的方位角,算出o3在新坐标系中的坐标o3(mo3,no3),不断测出o3点的坐标,并计算no3,使no3=0,o3点位于中心直线o1-o2上,o3点为前尺的平面中心点;
18、mo4=xo2+xo4*cos(α)-yo4*sin(α);
19、no4=xo2+xo4*cos(α)-yo4*sin(α);
20、计算o4在新坐标系中的坐标o4(mo4,no4),不断测出o4点的坐标,并计算no4,使no4=0,o4点位于中心直线o1-o2上,o4点为后尺的平面中心点。
21、可选的,步骤3中,基于平面精确分中结果,对盾构机姿态与导向系统显示姿态进行检核,具体为:
22、基于特征点在盾构机出厂前经过精密测量与盾构机形成的唯一坐标关系,在后续掘进过程中取任意三个以上点,计算得出盾构机当前姿态,与掘进过程中导向系统内部计算软件计算得到的作为盾构机显示姿态的始发前调试参数进行对比检核。
23、可选的,步骤3中,在过站后做过站井联系测量,复核洞内导线,具体为:
24、将布设在洞内的联系测量井下控制点带入到洞内延伸导线当中,用作洞内导线控制点,洞内导线人工引测得一组坐标,联系测量得另一组坐标,两组对比检核,校正得出新的起算边用于后续掘进过程中控制盾构机姿态。
25、经由上述的技术方案可知,与现有技术相比,本发明提出了一种基于分中法人工复测的过站前后盾构机姿态测量控制方法。在对洞内延伸导线及盾构机姿态同时进行双重复核的基础上,采用分中法人工复测完成盾构机内测量标志以及前后尺的平面精确分中,对盾构机姿态与导向系统显示姿态进行检核,并在过站后做过站井联系测量,复核洞内导线,有效的提高了盾构机掘进施工期间姿态及方位的控制,确保了后续盾构机掘进过程中姿态变化较大难以控制的现象,保证了盾构机每一次接收及始发的安全性,缩短了盾构机过井施工工期。
技术特征:1.一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,其特征在于,包括:
2.根据权利要求1所述的一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,其特征在于,还包括,将洞内延伸导线布设为双导线,进行双导线复测。
3.根据权利要求1所述的一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,其特征在于,所述步骤1中,建立过站前的独立坐标系,并在盾构机刀盘和盾尾选取四个坐标点,通过垂径定理理论计算得到盾构机的平面中心线,具体为:
4.根据权利要求3所述的一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,其特征在于,步骤2中,以所述平面中心线作为新的独立坐标系基准线,利用坐标转换公式计算得出盾构机内前后尺测量的平面中心点坐标,并不断建立新的独立坐标系,使得所述平面中心点坐标为零,完成盾构机内测量标志以及前后尺的平面精确分中,具体为:
5.根据权利要求1所述的一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,其特征在于,步骤3中,基于平面精确分中结果,对盾构机姿态与导向系统显示姿态进行检核,具体为:
6.根据权利要求1所述的一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,其特征在于,步骤3中,在过站后做过站井联系测量,复核洞内导线,具体为:
技术总结本发明公开了一种基于分中法人工复测的过站前后盾构机姿态测量控制方法,应用于盾构机姿态测量控制领域,包括:建立过站前的独立坐标系,并在盾构机刀盘和盾尾选取四个坐标点,通过垂径定理计算盾构机的平面中心线,作为新的独立坐标系基准线,利用坐标转换公式计算盾构机内前后尺测量的平面中心点坐标,并不断建立新的独立坐标系,使得平面中心点坐标为零,完成盾构机内测量标志以及前后尺的平面精确分中,对盾构机姿态与导向系统显示姿态进行检核,并在过站后做过站井联系测量,复核洞内导线。本发明提高了盾构机掘进施工期间姿态及方位的控制,避免了后续盾构机掘进过程中姿态变化较大难以控制的现象,保证了盾构机每一次接收始发的安全性。技术研发人员:金宝红,伍刚,周冠锋,王红亮,周伟光,李泽辉,周浩,席三平,康胜,罗志军,朱宏,黄飞强,齐元晶,张逸敏受保护的技术使用者:中铁一局集团城市轨道交通工程有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240726/116489.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种伞状打捞矛的制作方法
下一篇
返回列表