微系统及其生产方法与流程
- 国知局
- 2024-07-27 12:44:47
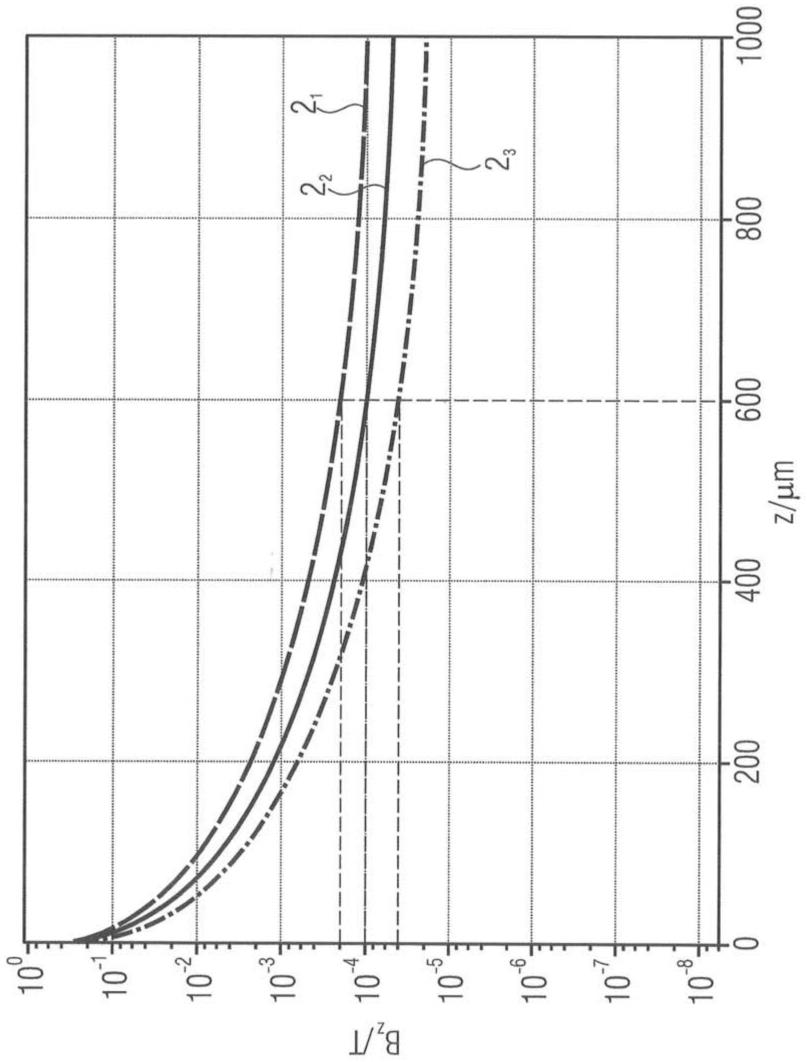
1.本发明涉及一种微系统及其生产方法,其中特别描述了包括永磁元件的微系统。另外,本发明涉及用于mems的磁性位置检测。背景技术:2.在许多mems(微机电系统)应用中,需要精确监测可移动微结构的位置,例如作为闭环中的控制信号。特别地,本文使用可集成在mems部件中的电容式、压阻式或压电式传感器元件。然而,在最狭窄的空间内监测大的行进距离和倾斜只能在有限的程度内。基于观察安装在可移动结构上的永磁体的磁场的磁性位置检测是一种备选方案。存在基于使用混合安装的传统微磁体的解决方案。然而,这些不适用于大规模应用。3.经常使用的技术是使用平面或梳状电极对的电容式位置检测,其中电极中的一个被布置在可移动元件处,如图14a和图14b中示意性地示出。图14a示出了可相对于反电极或接地电极1004移动并且可以通过致动器10061-10064驱动的三维可移动平台(3d台)1002。相比之下,图14b示出了mems扫描仪,其中微镜1008可以经由扭力梁1012和梳状电极10141偏转。这意味着图14a和图14b示出了在使用叉指结构(梳状电极、梳状驱动致动器)时具有静电驱动和电容式位置检测的mems元件的示例。主要优点是易于集成到mems元件中,因为可用的制造工艺和集成电路的可用性,其允许分辨率在几个ff(飞法拉)范围内。然而,电容式位置检测仅适用于非常小的行进距离,因为电容与电极距离的倒数成正比,因此在简单的平行板配置中随着电极距离的增加而快速减小。使用使电极距离保持恒定的梳状结构提供了改进处。在这种情况下,电容信号与梳状区域的重叠成正比。由于制造所需的精度,可制造的梳状结构从几何角度来看受到高度限制,这又意味着可监测的行进距离受到限制。在根据图14a的3d平台中,例如,如在[1]中所描述,例如,在x方向和y方向上的值是12.5μm,而在z方向上是3.5μm。在[2]中描述的根据图14b的mems扫描仪中,监测高达20°的(机械)倾斜角。只有极少数的电容式位置检测应用是惯性传感器和mems扫描仪。[0004]压阻式位置检测是一种备选方案。与电容式检测相比,可以监测更大的行进距离。然而,当与电容式检测所需的电极相比时,在mems设备中集成压敏电阻器需要相当多的复杂性。此外,连接四个电阻器以形成惠斯通测量电桥,以提高灵敏度,从而增加空间要求。例如,对于在[3]中描述并且允许在x/y平面中进行位置检测的mems扫描仪,例如,总共需要16个压敏电阻器。[0005]电容式和压阻式位置检测的主要缺点是不能以非接触方式执行信号检测,但需要与传感器元件进行电气和机械连接,即需要在mems设备内的特殊弹性结构。所需的弹性结构随着行进距离的增加而变得更大,以允许对应的变形。此外,在这两种情况下,结果都是机械耦合到驱动器。在压阻式位置检测的情况下,还需要一个力来使压阻元件变形。在电容式位置检测中,要克服的力来自静电相互作用。[0006]因此,在工业应用中广泛使用的非接触式光学位置检测对mems很感兴趣。在[4]中,光学位置检测例如用于实现磁场传感器。然而,廉价且可小型化的系统需要将光源和psd(位置传感设备)集成到mems设备中。例如,[5]中示出了这方面的示例。[0007]磁性位置检测是另一种非接触式技术。例如,经典应用是机床中的精密行程测量或精密位置确定。本文的位置检测是根据编码器原理执行的,即,使用预定模式与测量波形之间的比较。本文使用磁性线性标度和在小距离内来回移动的一个或多个磁场传感器,例如,如图15a或[6]中所述。图15a中示意性示出的用于磁性位置检测的系统包括磁标度或磁性标度1016,以生成通过磁阻(mr)传感器1022检测到的磁场线1018,以经由连接线1026提供模拟信号1024来评估电子器件1028。本文的经典标度主要由安装在不锈钢制成的支架上的硬磁体氧体带组成。可以使用现代mr传感器和优化的测量算法实现0.5μm的定位精度。此外,存在以下的应用,其中,磁性位置检测不是根据编码器原理,而是使用测量的绝对值。通常,对精度的要求较小,例如在用于检测打开或关闭的门或窗的磁性开关中或在用于检测封闭容器中的填充水平的传感器中。用于机器人的触觉传感器也值得一提,如图15b中所示并且在[7]中进行了描述。磁体1032被弹性体1034包围并且生成由3d霍尔传感器1038检测到的磁场1036。霍尔传感器1038可以布置在刚性或固体基板1042上。[0008]磁性位置检测几乎没有为mems发挥作用。主要问题是缺乏合适的微磁体,这些微磁体能够在长距离上生成强磁场,并且可以集成到基板平面上的mems元件中。除材料外,特性还特别取决于磁体的尺寸。磁体越小,磁体磁场减小的梯度越陡,但磁通密度的绝对值也会随着磁体越小而减小。磁体的纵横比,即磁体的长度(或高度)与其直径(或表面积)之间的比率在本文具有重要作用。高纵横比允许使用小直径,同时确保恒定的通量密度。直径超过50μm且纵横比至少为3:1的磁体将非常适合mems。然而,对于直径(边缘长度)大于500μm的磁体,较小的纵横比也是可以接受的。然而,半导体技术的沉积工艺仅设计用于几微米的层。以这种方式生产的磁体体积仍远低于目标区。具有数十微米厚度的结构可以电沉积。然而,对应的工艺仅适用于特定磁性材料。在[8]中,根据图15a的测量系统的具有特别精细的磁极结构的线性标度是通过conip电镀工艺在si基板上生产的。[9]描述了一种mems开关,该开关基于由电沉积feni制成的可移动微结构,该可移动微结构由磁场致动。如ndfeb或smco之类的磁性高性能材料无法电沉积。对于直径或边缘长度为50μm的结构,无法实现大于1:1的纵横比。[10]中示出了通过脉冲激光沉积(pld)沉积厚度超过100μm的ndfeb层。然而,这些层的微结构在这些制造工艺中仍未解决。备选地,ndfeb微磁体可以通过分散含有磁体的溶液来生产,[11],然而,其形状和尺寸变化很大。用松散的磁粉填充硅基板中的微缩印刷品,然后例如使用聚对二甲苯涂覆基板将其固定是一种备选方案[12]。由于有机材料有限的热稳定性和对磁性粒子的防腐蚀保护不足,这些基板的进一步加工受到很大限制。[0009]将需要允许精确且易于制造的对大行进距离进行精确位置监测的微系统。技术实现要素:[0010]本发明的目的是提供一种微系统和一种用于生产微系统的方法,其允许精确且容易地制造并且允许在未来操作中对大行进距离进行精确的位置监测。[0011]通过独立权利要求的主题来实现该目的。[0012]本发明的核心思想是将永磁装置以机械固定方式连接到微系统的支撑元件,这可以容易且精确地完成。这允许对大行进距离进行精确的位置监测。[0013]根据本发明的一个方面,永磁装置由磁性粒子的聚集体提供。例如,磁性粒子可以通过原子层沉积连接以形成固定(或刚性或固体)结构,其中固体结构可以使用涂层同时以机械固定方式连接到支撑元件。可以在支撑基板中精确地制造区域或空腔,从而允许精确调节由粒子填充的体积,并且因此还允许精确调节具有永磁装置的体积以及几何形状和纵横比。在填充磁性粒子上的后续原子层沉积允许以简单且可重复的方式将磁性结构精确地引入支撑元件,或将磁性结构布置在支撑元件上。[0014]根据一个实施例,一种用于生产微系统的方法包括布置第一支撑元件和第二支撑元件,使得第一支撑元件和第二支撑元件彼此之间的相对位置是可变的。该方法包括将磁性装置以机械固定方式连接到第一支撑元件,该磁性装置被配置成生成磁场。该方法包括连接传感器装置,该传感器装置被配置成检测磁场并且提供基于磁场的传感器信号。传感器装置以机械固定方式连接到第二支撑元件。执行该方法使得传感器信号指示支撑元件彼此之间的相对位置。[0015]在进一步的从属权利要求中定义本发明的优选实施例。附图说明[0016]下面将参照所附权利要求更详细地讨论本发明的实施例,其中:[0017]图1示出了根据实施例的由ndfeb(钕-铁-硼)粉末烧结而成的微磁体的轴向磁通密度bz的示例性模拟过程;[0018]图2示出了根据实施例的微系统的示意性侧视图;[0019]图3a示出了根据实施例的微系统的示意性透视图,其示例性地包括四个永磁体;[0020]图3b示出了根据实施例的微系统的一部分的示意性侧剖视图;[0021]图4a至图4b示出了用于说明本发明的微磁体对单个霍尔传感器的影响的模拟结果;[0022]图5a至图5b示出了与图4a至图4b相比,微磁体与霍尔传感器之间的距离增加;[0023]图6a至图6b示例性地示出了根据实施例的传感器元件的磁场过程的示意曲线图;[0024]图7a示出了根据实施例的可以在距磁体不同距离处获得的磁场的示意曲线图;[0025]图7b示出了根据实施例的支撑元件的示意性俯视图;[0026]图8a示出了信号取决于磁体大小而变化的过程的示意曲线图;[0027]图8b示出了当使用本发明的磁体时串扰的潜在数值的示例性表格;[0028]图9a示出了根据实施例的微系统的示意性侧剖视图,其中第一支撑元件被布置成能够通过平行于z轴的移动和/或通过围绕y轴旋转而相对于第二支撑元件移动;[0029]图9b示出了在根据实施例的配置中的图9a的微系统的示意性侧剖视图,其中作为图9a中的解释的备选或补充,第一支撑元件被配置用于平行于x轴移动和/或用于随着围绕平行于z轴的轴旋转的移动;[0030]图10a示出了根据实施例的微系统的示意性侧剖视图,其中永磁装置示例性地包括单个永磁体,而传感器装置包括不同数量的传感器元件;[0031]图10b示出了根据实施例的微系统的示意性侧剖视图,当与图10a的微系统相比时进行了修改,其中第二支撑元件被成形为包括凹槽;[0032]图11示出了根据实施例的微系统的示意性侧剖视图,该微系统被实现用于校正干扰影响;[0033]图12示出了根据实施例的具有参考磁场源的微系统的示意性侧剖视图;[0034]图13示出了根据实施例的方法的示意性流程图;[0035]图14a至图14b示出了使用平面或梳状电极对的电容式位置检测的公知概念的示例性图示;[0036]图15a示出了公知的磁性线性标度的图示;以及[0037]图15b示出了公知的触觉传感器的示意图,该传感器由被弹性体包围的磁体组成。具体实施方式[0038]在下面参照附图更详细地讨论本发明的实施例之前,需要指出的是,相同的元件、对象和/或结构或相同功能或相同效果的元件、对象和/或结构在不同的附图中具有相同的附图标记,使得在不同实施例中示出的这些元件的描述可以相互交换或相互适用。[0039]下面描述的一些实施例涉及微系统。微系统通常是指在毫米、微米甚至纳米范围内小规模制造的系统。虽然由于制造工艺,半导体材料特别适用于这类结构,但实施例不限于此,因此,作为半导体材料的备选或补充,特别是mems(微机电系统)工艺,还可以使用其他材料,如金属材料或无机材料,如树脂等。[0040]下面描述的一些实施例涉及通过原子层沉积(ald)烧结粉末而成的微磁体。例如,在[13]或[14]中描述了这类方法。发明人已经意识到,当应用于磁性粒子时,这类方法提供了一种有希望的解决方案,如那些包括ndfeb材料(即ndfeb粉末)的磁性粒子。例如,这些可以应用到基板上,如那些包括像硅之类的半导体材料的基板,并且可以允许具有良好再现性的非凡磁特性。发明人已经发现,具有例如在25μm和2000μm之间的结构宽度的任何几何形状都可以在基板平面中实现。微磁体的高度可以例如高达100μm、200μm、300μm或更大,例如高达500μm。[0041]实施例利用集成在可移动结构中的微磁体的磁场来进行位置检测。集成在可移动结构中意味着磁性元件可以例如布置在基板的凹槽中。然而,这不是绝对必要的,因为在布置永磁装置之后仍可能更换基板。因此,可以将粒子引入凹槽中,例如,这些可以固化并且随后去除以这种方式获得的三维结构周围的基板以至少部分地暴露永磁装置。当平移和/或倾斜可移动结构时,由集成的微磁体生成的磁场会相应地移位。由可能在空间上固定的磁场传感器的布置检测到的信号对应于磁场的移位而改变,因此允许得出关于可移动结构的平移和/或倾斜的结论。[0042]图1示出了由ndfeb(钕-铁-硼)粉末烧结而成的微磁体的轴向磁通密度bz的示例性模拟过程,在三个变体中,每个变体包括50μm的直径d,其中此处的直径是指基板平面中的尺寸,如空腔的整个直径。微磁体可以包括不同的长度,其可以对应于空腔的深度。过程21示例性地指250μm的长度,过程22指150μm的长度,而过程23指50μm的长度。显而易见,即使对于过程23,在600μm的距离下,仍然可以实现大约0.1mt的磁场强度,使用更深的磁体甚至可以达到更高的磁场强度。从5:1的纵横比开始,随着纵横比的增加,通量密度的增加显著降低,然而,其中这个数量级的磁场强度相对容易通过现代磁场传感器进行测量。例如,在[15]中描述了通过[14]中的专利方法制造的具有大纵横比的基于粉末的微磁体阵列,用于产生用于如磁标度之类的应用的二维磁场图案。[0043]图2示出了根据实施例的微系统20的示意性侧视图。微系统20包括布置成改变彼此相对位置的支撑元件121和122。这可以通过沿着一个或多个空间方向x、y和/或z移动支撑元件121和/或122来执行。支撑元件121和/或122可以包括相同或相互不同的材料。示例性地,支撑元件121和/或122可以包括半导体材料,其中支撑元件121和/或122中的每一个还可以包括层序列,其中处于掺杂或未掺杂状态的半导体材料与其他基于半导体的材料交替,如绝缘材料,如sio或sin等,和/或其中布置有导电材料,如金属材料。示例性地,微系统20是mems。支撑元件备选地或附加地包括玻璃材料或陶瓷材料,其中本文还包括这些材料的组合和/或这些材料与其他材料的组合。[0044]支撑元件121例如是可移动的支撑元件。支撑元件122可以包括基板,使得传感器信号22指示可移动支撑元件21相对于基板122的位置。备选地,支撑元件122可以是可移动的并且支撑元件121可以是基板和/或两个支撑元件都可以相对于第三结构移动。[0045]微系统20包括永磁装置14,该永磁装置被配置成基于永磁特性生成磁场16。永磁装置可以固定地连接到支撑元件121或122,其中机械固定连接是优选的。机械固定连接可以理解为彼此之间近似刚性的连接。示例性地,永磁装置14可以通过沉积方法、胶合方法或其他安装方法来布置。[0046]优选实施例涉及以下事实:永磁装置14是通过原子层沉积等方式固化粒子而获得的三维结构。这种粒子涂层的沉积可以同时用于获得支撑元件121与永磁装置14之间的固定连接。[0047]微系统附加地包括传感器装置18,该传感器装置以机械固定方式连接到支撑元件中的另一个,例如支撑元件122。可以基于安装工艺或胶合工艺来获得传感器装置18与支撑元件122之间的机械固定连接。传感器装置18被配置成检测磁场16并且提供基于磁场16的传感器信号22。传感器信号22指示支撑元件121和122的相对位置,因为由传感器装置18检测到的磁场的幅度和/或如方向分量等其他特性是基于可变的相对位置而可变的。实现方式允许传感器信号22明确地指示支撑元件121和122相对于彼此的相对位置。[0048]图3a示出了根据实施例的微系统30的示意性透视图。微系统30的永磁装置可以示例性地包括四个永磁体141-144。支撑元件121可以示例性地形成为圆盘或圆柱体,其经由一个或多个弹簧元件241-244相对于支撑元件122被支撑。弹簧元件241-244可以示例性地围绕支撑元件121对称布置,但不是必须的。支撑元件121相对于支撑元件122的相对位置可以基于弹簧元件241-244,如基于围绕x轴、y轴或z轴中的一个或多个的旋转,和/或基于沿着这些轴中的一个或多个的横向移动而移动。[0049]弹簧元件241至244可以相对于支撑元件122连接或支撑支撑元件121。作为四个弹簧元件的数量的备选,可以使用大于1的任何其他数量。至少一个弹簧元件可以预设优选的移动方向以改变支撑元件121与122之间的相对位置。因此,扭力弹簧元件可以示例性地预设扭力,而弯曲元件可以沿着优选的弯曲方向变形并且形成为沿着与其垂直的方向变硬。支撑元件121和/或支撑元件122可以示例性地形成为板元件。板元件可以示例性地包括镜子或者是镜子。然而,还可以实现任何其他功能。实施例提供了形成为扫描仪、电气开关、光开关、阀或泵的微系统。[0050]相对位置的变化方向可以基于支撑元件121与122之间的弹簧元件的至少一个取向。备选地或附加地,相对位置的变化方向可以基于用于允许支撑元件121和122中的至少一个的旋转的至少一个旋转轴。备选地或附加地,相对位置的变化方向可以基于至少一个限位表面或限位边,沿着该至少一个限位表面或限位边预设支撑元件121和/或122的移动。例如,这种限位表面或限位边可以是机械止动件。[0051]示例性地,例如,支撑元件121可相对于支撑元件122在x平面、y平面中或与其平行地移动。x/y平面因此可以描述在相对位置中变化的平面。永磁元件141至144中的至少一个、若干个或全部可以相对于传感器装置18的传感器元件布置在该平面中。关于传感器元件181至184,磁性元件141至144可以布置成与其垂直,即沿着布置成垂直于x/y平面的z方向。在根据微系统30的布置中,永磁装置18可以包括多个至少一个,例如四个永磁元件141至144,用于生成与相应的永磁元件141至144相关联的磁场。传感器装置18可以包括对应数量的传感器元件181到184。示例性地,精确地,一个传感器元件181至184可以明确地与每个永磁元件141到144相关联。在图3a的示例中,这通过永磁体14i和传感器元件18i的相对布置来完成,其中i=1、2、3、4。这允许将多个永磁元件14布置成与处于微系统30的静止位置的传感器元件18镜像对称,其中平行于x/y平面的平面是镜像平面。[0052]示例性地,永磁体141-144集成在支撑元件121的材料或结构中,其可以示例性地通过在支撑元件121中形成填充有磁性粒子的空腔并且随后通过涂覆工艺固化来获得。通过随后使一个或多个表面平面化,可以获得均匀的表面结构。即使没有平面化,一个或多个永磁体141-144(即磁性元件)也可以在结构上集成在支撑元件121中。[0053]传感器装置18可以包括一个或多个传感器元件181-184,每个传感器元件被配置成提供测量信号。示例性地,传感器元件181-184可以实现为用于检测空间磁场分量的霍尔元件,或用于检测若干个空间分量的霍尔传感器。[0054]示例性地,一个传感器元件181-184均可以与对应的永磁体141-144相关联。例如,在微系统30的静止位置,相应的永磁体141-144可以包括相对于相关联的传感器元件181-184的参考位置,例如被布置成居中。[0055]基于支撑元件121与122之间的相对位置的移位,可以改变永磁体141至144相对于传感器元件181至184的相应位置,使得传感器元件181至184的传感器信号中的一个或多个可能会变化。示例性地,通过围绕x轴的旋转,传感器元件181和182的信号可以保持大致恒定,而通过围绕y轴的旋转,例如,传感器元件183和184的传感器信号可以保持大致恒定。位置的其他相对变化导致传感器信号的其他变化或一致性。本文还可以考虑与相对位置变化相关的机械边界条件。示例性地,永磁体14i(i=1、…、n,n≥1)可以示例性地布置成使得可以检测机械可允许的或提供的相对移动的变化。例如,如果从最终位置开始只能沿着一个方向移动,则布置单个永磁体可能已经足够了。如果可以沿着一个轴但在两个方向上移动,则当仅使用一个永磁体时,可能会导致测量信号不明确,这可以通过布置第二永磁体和/或第二传感器元件来纠正。附加的永磁体和/或传感器元件可以覆盖附加的方向。[0056]图3b示出了根据实施例的微系统30’的一部分的示意性侧剖视图。当与微系统30相比时,支撑元件121被形成为略微经过修改,例如使得当从对称轴26开始时,沿着径向方向(如负x方向),磁性元件或永磁体141可以不同于图3a中所示的,其中该磁性元件或永磁体可以形成支撑元件121的外边缘,被外边缘28包围。外边缘28可以包括支撑元件121的支撑材料或基材。示例性地,当用于用磁性粒子填充的空腔保持在边缘区域28的周围并且例如尚未通过蚀刻工艺等暴露时,或者空腔不放置在支撑元件121的端子或边缘处时,可以获得这种结构。虽然这可能会减少两个相邻或相对的永磁体之间的最大可能距离,但这允许在制造方面具有优势,例如,因为外边缘28的材料比永磁体141更容易加工。外边缘28的沿着x方向的尺寸28r例如可以包括任何所需要的小值,其中实施例提供100μm、75μm或50μm的最大值。永磁体141沿着径向方向x的尺寸141r或尺寸a可以包括任何值。示例性地,值a被实现为包括至少20μm且至多2000μm、至少100μm且至多1500μm或至少500μm且至多1000μm的值,如750μm。这意味着永磁装置可以包括至少一个永磁元件,其中永磁元件可以垂直于厚度方向z包括例如沿着x的第一平移尺寸和垂直的第二平移尺寸,例如y。第一平移尺寸和/或第二平移尺寸可以包括至少20μm且至多2000μm的值。[0057]对称轴26与永磁体141的面向对称轴26的外边缘之间的距离32还可以包括例如可以取决于微系统的应用的任何值。示例性地,距离32包括至少50μm且至多5mm、至少100μm且至多3mm、或至少200μm且至多1mm的值,例如450μm。在支撑元件121的对称实现方式的情况下,距离32的两倍值可以描述两个相对的永磁体(例如微系统30的永磁体141和142)之间的距离或间隙。[0058]此处的距离32和尺寸a可以被选择为使得永磁元件彼此之间的距离被选择为使得在与其相关联的传感器元件的位置处对永磁元件的磁场的检测至多微不足道地受相邻永磁元件的磁场的影响。例如,此处的微不足道的影响可以理解为使得在与另一个永磁元件相关联的传感器元件的位置处,与另一个永磁元件的磁场的幅度相比,永磁元件的磁场至多为10%、至多5%或至多2%。这意味着,在微系统30的传感器元件182、183或184的位置处,永磁元件141的磁场幅度例如为至多10%、至多5%或至多2%。这可以通过相应地调整距离b来完成,该距离示例性地涉及永磁体的主侧表面的中心。[0059]在所示的微系统30的布置中,到对称轴的距离32和到相对的永磁元件的两倍距离例如比到直接相邻的永磁元件143和144的距离大。到相对的和直接相邻的永磁体142、143和144的距离此处可以选择为使得永磁体141至144中的每一个都包括到任何其他永磁体的距离,即在任何配对中,该距离至少为50μm,至少70μm或至少100μm。备选地或附加地,该距离可以是沿着相应连接方向的永磁体和用于形成对的另一个永磁体的侧向尺寸的至少两倍。连接方向例如沿着永磁体141和142之间的x方向、沿着永磁体143与144之间的y方向以及沿着永磁体141与143或141与144之间的对角线方向布置。因此,该距离可以示例性地对应于值a的两倍。[0060]传感器元件181可以沿着径向方向x包括可以小于尺寸a的延伸或尺寸181r,其中其他实施例也是可能的。示例性地,尺寸181r包括至少1μm且至多300μm、至多200μm或至多170μm的值,例如,如150μm。虽然一些实施例提供至少20μm的尺寸,但该尺寸也可以低于20μm。示例性地,这类小磁体可以单独使用或以多个或大量使用,例如通过将许多传感器元件布置在阵列中。这种阵列可以被视为若干个磁体的复合或组,或者单独的组合磁性元件。[0061]永磁体141可以包括厚度或长度,即沿着垂直于轴向的方向z的尺寸,其被称为厚度34并且可以示例性地包括至少50μm且至多1000μm,至少100μm且至多700μm或至少200μm且至多500μm的值,例如,如300μm。[0062]在微系统30或30’的静止位置,永磁体141和传感器元件181的相互面对的表面之间的距离36可以例如包括至多2000μm、至多800μm或至多600μm的值,并且被调整用于支撑元件121相对于支撑元件122的意图或可容忍的移动。这意味着可以考虑相对于相对位置的变化要监测的移动幅度的设计。最小距离还可以适用于该移动并且例如至少为10μm、至少70μm或至少100μm。这意味着在微系统的静止位置中,支撑元件121和122可以包括至少10μm且至多2000μm的距离36。[0063]相邻的永磁元件(例如141和143或141和144)可以包括相互不同的磁场方向。示例性地,相互相邻的永磁体的北极可以彼此面对,或者备选地,南极亦如此。[0064]换言之,图3a示意性地示出了包括例如由硅制成的可移动的弹簧悬挂平台的示例性布置,该平台具有四个集成的微磁体和四个位于下方并且固定到地面的霍尔传感器。在图3b的截面图中表示重要尺寸。该示例性布置中的平台可以包括2000μm的直径和300μm的高度,即基于对称性,距离28r、141r和32的总和可以是1000μm,而尺寸34可以是300μm。可能的方形磁体在其拐角处的边缘长度a例如可以是500μm,中心到中心的距离b可以是1400μm。磁体在平台的整个厚度上延伸。宽度为50μm的si边缘保持沿着平台周边。未在图4a中示出该si边缘。霍尔传感器的有效面积例如可以是150μm×150μm,并且示例性地位于以相应磁体为中心的轴上。例如,该轴可以垂直于移动平面布置。因此,例如在x/y平面中的移动可以用于实现沿着z方向或与其平行的对应轴,如图3a中所示。因此,图3a和图3b示出了包括弹簧悬挂si平台的布置的示意图,该平台具有四个集成的微磁体,以及位于下方并且固定到地面的四个霍尔传感器,其中图3b示出了可能按比例对半绘制的平台的截面。[0065]图4a和图4b示出了磁体(例如图3a的永磁体141和142)对单独霍尔传感器(例如传感器元件181)的影响。距离36示例性地为100μm。磁体141可以生成反映其几何形状的强磁场,该强磁场的最大值几乎完全覆盖霍尔传感器181。然而,如图4b中所示,霍尔传感器181上的磁体142的串扰很小。如图5a和图5b中所示,300μm的距离36也保持该状态。相比之下,图4a以示意性俯视图示出了永磁体141的磁场381在传感器元件181的位置处的强度。图4b以与图4a相同的透视图示出了永磁体142的磁场382的强度,其中显而易见,该磁场不影响或至多在不显著程度上影响传感器元件181的测量。[0066]图5a和图5b示出了对应于图4a和图4b的图示,其中距离36增加到300μm。磁场381和382的传播可以包括更大的区域,但是基于永磁体141与142之间的距离仍然很小,以至于传感器元件181的测量不受相邻永磁体142的影响或仅在很小程度上受到影响。[0067]图6a和图6b示出了示例性地用于传感器元件181的磁场bz的过程的示意曲线图。随着距离dsens的增加,例如,其可以以μm检测并且对应于距离36,永磁体141的磁场可以减小,而磁体142的磁场已经是小的并且可以在零值区域内保持恒定。[0068]图6b示出了图6a的曲线的导数,由此也显而易见,在霍尔传感器181的位置处永磁体142的磁场的测量值是低的。[0069]换言之,图6a表示在900μm的行进距离上磁通量密度bz对传感器平面与磁体下侧之间的距离dsens的依赖性,其中dsens=100μm可以表示微系统的静止位置。在这种布置中由永磁体141生成的磁场bz将始终保持在3mt以上。同时,在相等距离的情况下,永磁体142的磁场(串扰)就幅度而言将始终保持在永磁体141的磁场的5%以下。对于磁性位置检测,尤其是依赖于待检测位置变化的磁场变化是决定性的或有影响的。该位置处的磁场绝对值示例性地通过所选磁场传感器仅对可检测性做出决定和朝向来自环境的杂散场仅对敏感性做出决定。对于此处所示的示例,图6b示出了在z方向上移动时磁场的变化,其对应于图6a中所示曲线的导数。即使在距离dsens为400μm(即行进距离为300μm)的情况下,也可以预期优于0.1mt/μm的灵敏度。[0070]图7a示出了可以在不同距离dsens处获得的磁场示意曲线图。不同的曲线421至424与示例性方形永磁体141至144的相互不同的边缘长度相关。曲线421与200μm的边缘长度相关,曲线422与300μm的边缘长度相关,曲线423与4μm的边缘长度相关,而曲线424与500μm的边缘长度相关。如图7b中所示,其示出了支撑元件121的示例性示意性俯视图,示例性1400μm的距离b可以保持不变,其中较小的尺寸可以等效于边缘28r的扩大和/或总直径44的缩小,示例性地可以是2000μm。[0071]换言之,图7a示出了磁通量密度bz对图7a中磁体的dsens和边缘长度a的依赖性的过程,而图7b是根据图3a和图3b的平台的俯视图,用于示出如何缩放磁体。此处磁体的厚度和磁体的中心到中心的距离b可以示例性地保持恒定并且示例性地厚度为300μm并且距离b为1400μm。图7a示出了bz的过程如何取决于磁体的大小。此处的磁体在中心按比例缩放,使得相对磁体之间的距离b(1400μm)以及根据图3a和图3b的平台外部尺寸(2000μm直径)保持恒定,还如图7b中所示。[0072]图8a示出了信号变化过程的示意曲线图,即bz的导数,λbz,其与磁体大小无关,并且提供了对最重要的模拟结果的概述。在较小的行进距离的情况下,即dsens》100μm,较小的磁体是有利的,因为此处的磁场在较短的距离上减小,因此可以实现更高的灵敏度。此外,当使用较小的磁体时,串扰会减少,如图8b中所示。然而,在磁体大小减小的情况下,灵敏度变得越来越非线性。备选地,随着边缘长度a的减小,磁体之间的距离b可以减小。这意味着优选的是边缘长度在20μm与2000μm之间的微磁体,并且优选边缘长度在500μm与1000μm之间的微磁体。[0073]在图8a中,曲线461示出了边缘长度a=200μm的结果,曲线462示出了边缘长度a=300μm的结果,曲线463示出了边缘长度a=400μm的结果,曲线464示出了a=500μm的结果。曲线示出了信号变化的过程,即bz的导数,其取决于dsens和图8a中磁体的边缘长度a,以及图8b中最重要的模拟结果的概要。[0074]已经表明,可移动mems结构的复杂位置变化可以通过使用行程范围的磁性位置检测来监测,与电容式或压阻式位置检测相比,该行程范围至少大一个数量级,并且具有恒定的空间要求。即使是基于两对微磁体和传感器的简单实现方式也允许检测竖直移位和倾斜,即平面内的侧向移位和扭曲。如已经结合图3a和图3b所描述,通过使用另外的微磁传感器对,类似地,可以监测任何三维位置变化。在图4a、图4b、图5a、图5b、图6a、图6b、图7a、图7b、图8a和图8b所示的结果中,假设集成磁体的磁化强度为450mt,这可以使用所述的烧结的ndfeb粉末。备选地或附加地,还可以使用其他硬磁性材料。其中包括例如smco、ptco、alnico、cofeni、fecrco和不同的硬质铁氧体,以及它们的组合。与光学位置检测相比,所描述的磁性位置检测更便宜,对污染不太敏感,并且允许相当高的精度。[0075]图9a示出了根据实施例的微系统90的示意性侧剖视图,其中支撑元件121示例性地布置成通过平行于z轴的移动和/或通过围绕y轴旋转而相对于支撑元件122可移动。多个(例如两个)永磁体141和142被布置成相对于传感器元件181和182针对平行于x/y平面布置的平面48镜像对称。[0076]虽然平行于z轴的移动521可能导致传感器元件181和182中的测量值的相等变化,但是对准为围绕y轴旋转的移动522可能导致测量值的反向变化。这意味着支撑元件121可以相对于支撑元件122沿着至少一个轴线以平移方式相对移位,和/或相对于支撑元件122倾斜。[0077]图9b示出了在以下配置中的微系统90的示意性侧剖视图,其中支撑元件121作为图9a的讨论的备选方案或附加于图9a的讨论被实现以用于平行于x轴的移动523和/或用于作为围绕平行于z轴的轴的旋转的移动524。移动523和524两者都可能导致传感器元件181和182中的测量值的相等变化,至少就测量幅度而言。[0078]换言之,图9a和图9b示出了使用两个微磁传感器对141/181和142/182来检测图9a中的竖直移位和倾斜以及图9b中的平面中的侧向移位和倾斜的可能布置的示意图。[0079]图10a示出了根据实施例的微系统100的示意性侧剖视图,其中永磁装置示例性地包括单个永磁体141,而传感器装置包括各自不同数量的传感器元件181和182。永磁装置和/或传感器装置可以包括更多数量的元件。在图10a的实施例中,传感器元件181和可能是附加传感器元件的传感器元件182与永磁元件141相关联。这意味着传感器元件181和182被布置成在空间上与永磁体141相邻,优选地使得在支撑元件121和122相对于彼此移动的情况下,可以在传感器元件181和182两者中确定标记的测量信号。传感器装置18可以包括计算装置54,例如专用集成电路(asic)、微控制器、处理器等,其被配置成差分评估传感器元件181和182,使得传感器信号22基于通过至少使用传感器值181和182进行测量的永磁体141的磁场的差分评估。[0080]这意味着传感器装置18示例性地包括至少一个传感器元件和评估电路54,它们一起形成专用集成电路(asic)的至少一部分。[0081]如结合微系统30或90所描述,永磁装置和传感器装置可以布置在不同的平面481和482中。[0082]图10b示出了与微系统100相比经过修改的微系统100’的示意性侧剖视图。此处的支撑元件122被成形为提供凹槽或空腔48,其还备选地可被称为与支撑元件121相邻的高度。由此可以提供用于传感器元件181和182的高度,使得传感器装置18或传感器元件181和182以及永磁装置(特别是永磁体141)可以布置在共同平面48中。传感器元件181和182两者都可以与永磁体141相关联。[0083]根据另外的实施例,微系统包括永磁装置,该永磁装置至少包括用于生成与第一永磁元件相关联的第一磁场的第一永磁元件和用于生成与第二永磁元件相关联的第二磁场的第二永磁元件。传感器装置包括传感器元件,该传感器元件与第一永磁元件和第二永磁元件两者相关联,并且被配置成检测第一磁场和第二磁场的重叠。与使用若干个传感器元件检测单个磁场相比,这意味着可以使用共同的传感器元件检测若干个磁场。[0084]这些实现方式可以根据需要组合,使得不同的永磁元件可以与单个传感器元件(图3a)相关联,与若干个传感器元件(图10a和图10b)相关联,并且与通过若干个传感器元件检测到的其他永磁元件相关联。[0085]根据实施例,传感器装置包括至少一个传感器元件。传感器装置的每个传感器元件被配置成提供与传感器元件相关联的测量信号,如霍尔传感器的输出信号。传感器装置可以被配置成至少部分地校正对传感器元件的干扰影响。[0086]换言之,微磁体和传感器不一定必须成对使用。图10a和图10b示出了另外两个实现方式,其中两个传感器181和182均与微磁体141相关联。这允许评估差分信号。这继而又允许更高的精度并且消除错误源。[0087]图10a和图10b示出了用于检测侧向移位的可能布置的示意图,其中两个传感器181和182均与微磁体141相关联以允许差分测量。在根据图10a的布置中,微磁体可以垂直于平面磁化,即沿着z方向。在根据图10b的布置中,平面(即x/y平面)内的磁化可以是有利的。[0088]取决于布置,微磁体可以垂直于平面并且在平面内磁化。布置内的微磁体的相对磁化也是可能的。所有公知的磁场传感器,如霍尔传感器、amr(各向异性磁阻)传感器、gmr(巨磁阻)传感器或magfet(磁晶体管)都可以用于检测。根据布置、测量目的和传感器,可以在平面内和垂直于平面上两者执行测量。[0089]图11示出了根据取向用于校正干扰影响的实施例的微系统110的示意性侧剖视图。微系统110示例性地是微系统100的修改并且通过传感器装置的参考传感器元件183对其进行扩展。参考传感器元件183被配置成检测参考磁场并且提供参考信号62。传感器装置被配置成使用参考信号62调整传感器元件181的测量信号641和/或传感器元件182的测量信号642或传感器信号22或其组合来校正可能至少部分地影响传感器元件181和/或182的干扰影响。传感器元件183可以示例性地布置在永磁体141和142的磁场之外。参考磁场可以示例性地是微系统的周围磁场,即环境影响。[0090]换言之,图11示出了一种基于在支撑元件上使用一个或多个参考传感器来补偿漂移效应或提高精度的布置。[0091]图12示出了根据实施例的微系统120的示意性侧剖视图。当与微系统110相比时,它包括参考磁源66。其参考磁场在参考传感器的位置处与环境磁场重叠,从而可以由参考传感器检测到组合磁场。优选地,参考磁场被实现为在常规操作中,即在正常地球磁场的情况下,包括例如所测量的磁场的主要部分,例如至少50%、至少70%或至少90%。[0092]参考磁场66可以示例性地是传感器装置的一部分并且被配置成生成由参考传感器元件183检测到的参考磁场。这示例性地允许备选地或除了检测环境影响之外,将参考磁场66检测为人工生成的磁场。示例性地,参考磁体66可以与永磁体141和142相似或相同地形成,使得可以使用参考信号62来检测固定参考磁体66的退化或老化,这可以被考虑用于测量信号641和642的信号评估。将参考磁源66和参考传感器元件183相对于相对位置彼此固定以获得可靠的测量结果是有利的。[0093]微系统110和微系统120可以被实现为使得参考信号62完全或部分不受支撑元件121与122之间的相对位置的变化的影响。因此,参考信号62基本上不受影响,例如,如果当改变支撑元件121与122之间的相对位置时,经受至多10%、至多5%或至多2%的变化。[0094]对每种检测方法的潜在重要的基本要求是最大限度地独立于环境影响。除了制造公差和固有漂移效应之外,环境温度和/或电磁杂散场可能会造成干扰,例如它们可能会显著影响或破坏传感器信号。通过在支撑元件上集成附加的参考传感器和/或参考微磁体,可以使这种影响最小化。在根据图11的实现方式中,参考传感器183被定位为在支撑元件122上间隔开,使得其信号不受可移动微结构12上的微磁体141和142的位置变化的影响。在根据图12的结构中,使用了与可移动微结构间隔开的传感器-微磁体参考对66/183。此处的优点是可以补偿微磁体的漂移和改变效应。用于参考测量和检测的微磁体的尺寸可以不同,但不排除尺寸相同。[0095]换言之,图12示出了基于在支撑元件上使用一个或多个传感器-微磁体参考对来补偿漂移效应或提高精度的布置。[0096]图13示出了根据实施例的方法1300的示意性流程图。步骤1310包括将配置成生成磁场的磁性装置以机械固定方式连接到第一支撑元件。步骤1320包括将传感器装置以机械固定方式连接到第二支撑元件,该传感器装置被配置成检测磁场并且提供基于磁场的传感器信号。步骤1330包括布置第一支撑元件和第二支撑元件使得第一支撑元件和第二支撑元件相对于彼此的相对位置是可变的。执行该方法使得传感器信号指示支撑元件彼此之间的相对位置。因此,步骤1310、1320和1330的顺序可以根据需要而定。在所提到的最后一个步骤中,例如通过暴露或释放或蚀刻,执行相对于彼此布置支撑元件可以是有利的。这不排除后续步骤。在此之前,由于存在于两个不同的支撑基板上,因此彼此独立,磁性装置可以连接到第一支撑元件并且传感器装置可以连接到第二支撑元件。备选地,第一支撑元件可以例如通过表面微机械在第二支撑元件上进行处理,并且仅在此之后实现第一支撑元件中的磁体。释放第一支撑元件可以通过从牺牲层蚀刻来执行。可以在共同的处理步骤中执行一个或多个步骤。[0097]因此,可以执行该方法使得连接永磁装置,包括以下步骤:在支撑元件121的区域中产生凹槽;将多个磁性或可磁化微粒填充到凹槽中;以及通过原子层沉积固化多个磁性或可磁化的微粒。可选地,可以在其后执行可磁化微粒的磁化。[0098]前述实施例中的微磁体和/或传感器元件的数量仅仅是示例性地选择的。可以选择任何其他数量的永磁元件和/或传感器元件和/或参考磁源和/或参考传感器元件。[0099]在与电容式和压阻式位置检测相比时,所示实施例允许在最小空间内监测大得多的行进距离。可以使用一种相同的测量布置来监测复杂的轨迹。可移动微结构不需要特殊的电气连接,磁性位置检测可以以非接触方式工作,并且与驱动分离。不应该施加附加的力。所描述的基于粉末的微磁体可以很容易地集成到微结构中。通过使用集成在同一mems设备上的参考元件,可以补偿范例地由温度或电磁杂散场变化引起的测量误差。[0100]实施例尤其可以用于用来监测mems扫描仪或微镜的磁性位置检测、用于具有微透镜和其他光学元件的mems孔径板、用于具有辐射源和检测器的可移动微结构、用于用来生产、调节或监测流体电流的mems装置中的可移动结构(泵、阀、质量通量传感器、流量调节器等和/或位于封装体积或系统中的可移动微结构)。[0101]可能的实施例还可以描述如下:[0102]·一种包括相对于刚性支撑元件可移动的微机械结构的布置,包括[0103]о集成在可移动微机械结构中的一个或多个微磁体的布置,[0104]о以及刚性支撑元件上的一个或多个磁场传感器的布置,[0105]使得微机械结构在空间中的位置或移动的变化导致磁场传感器的输出信号的变化,该变化与位置或移动的这种变化明确相关。[0106]·可移动的微机械结构可以[0107]о用弹簧连接到支撑元件,[0108]о否则可以自由移动。[0109]·可移动微机械结构可以包括一个或多个优选的移动方向或位置变化。这些可以通过以下各项预先确定:[0110]о通过将可移动微机械结构连接到支撑基板的弹簧元件,[0111]о通过微机械结构可以围绕其旋转的旋转轴,[0112]о通过微机械结构可以移动的限位表面。可移动的微机械结构可以例如由于重力而靠在表面上,但可以在该平面内自由滑动,[0113]о通过微机械结构可以沿着其在表面上移动的限位边。[0114]·可移动微机械结构与静止状态下的刚性支撑元件之间的距离优选地在50μm与2000μm之间,特别优选地在100μm与500μm之间。[0115]·单独微磁体的边缘长度优选地在20μm与2000μm之间,特别优选地在50μm与1000μm之间。[0116]·微磁体之间的距离优选地在50μm与3000μm之间,特别优选地在100μm与1000μm之间。[0117]·可移动微机械结构上的微磁体的数量和位置可以与支撑元件上的磁场传感器的数量和位置以镜像对称方式匹配。然而,这些布置也可以在元件的数量和位置上有所不同。[0118]·微磁体和磁场传感器可以成对相对。然而,若干个磁场传感器也可以与一个微磁体相关联,或者一个磁场传感器与若干个微磁体相关联。[0119]·优选但不排他地,可移动微机械结构上的相邻微磁体彼此间隔开,使得微磁体的杂散场不会影响与其他微磁体相关联的任何磁场传感器。[0120]·参考磁场传感器放置在支撑元件上,使得其位于可移动微机械结构上微磁体的杂散场之外。[0121]·集成在支撑元件中的参考微磁体布置成与参考磁场传感器相对。参考微磁体是固定的,即其相对于参考磁场传感器的位置在微机械结构的移动期间不会改变。[0122]·可以使用任何磁场传感器,如霍尔、amr;例如,gmr、magfet。在阵列的情况下,传感器可以作为单独的芯片放置在支撑元件上。然而,特别是在各个传感器之间的距离较小的情况下,优选地将其集成在通过公知的半导体工艺制造的片上电路(asic)中。[0123]·微磁体是通过原子层沉积(ald)将大小在微米范围内的松散的磁性材料粉末烧结而成的。[0124]虽然已经结合设备描述了一些方面,但应理解,这些方面也表示对对应方法的描述,使得设备的块或元件也应理解为对应的方法步骤或方法步骤的特征。类似地,结合或作为方法步骤描述的各方面也表示对对应设备的对应块或细节或特征的描述。[0125]上述实施例仅表示本发明原理的说明。本文描述的布置和细节的修改和变化对于本领域的其他技术人员将是显而易见的。因此,本发明旨在仅由所附权利要求的范围限制,而不是本文已经使用对实施例的描述和讨论呈现的具体细节。[0126]参考资料[0127][1]x.liu等人,“a mems stage for 3-axis nanopositioning”,j.micromech.microeng.17,2007年[0128][2]a.hung等人,“an electrostatically driven 2d micro-scanning mirror with capacitive sensing for projection display”,传感器和执行器,a222,2015年[0129][3]s.lani等人,“2d mems scanner integrating a position feedback”,matec,web of conferences 32,01001,2015年[0130][4]b.park等人,“lorentz force based resonant mems magnetic-field sensor with optical readout”,传感器和执行器a,241,2016年[0131][5]x.cheng等人,“integrated optoelectronic position sensor for scanning micro-mirrors”,传感器,18,2018年[0132][6]操作说明scdplus自:06.11.2009固件v7.08[0133][7]uni leeds wang,design methodology for magnetic field-based soft tri-axis tactile sensors,2017年[0134][8]z.-h.xu等人,“grooved multi-pole magnetic gratings for high-resolution position-ing systems”,日本应用物理学杂志54,2015年[0135][9]c.coutier等人,“a new magnetically actuated switch for precise position detec-tion”,proc.ieee传感器会议,美国科罗拉多州丹佛市,2009年[0136][10]m.nakano等人,“nd-fe-b film magnets with thickness above 100μm deposited on si substrates”,transactions on magnetics,第51卷,第11期,2015年[0137][11]e.s.leland等人,“a mems ac current sensor for residential and commercial electricity end-use monitoring”,j.micromech.microeng,19,2009年[0138][12]n.jackson等人,“integration of thick-film permanent magnets for mems applica-tions”,j.microelectromech系统,第25卷,第4期,2016年[0139][13]t.lisec等人,“a novel fabrication technique for mems based on agglomeration of powder by ald”,j.microelectromech系统,第26卷,第5期,2017年[0140][14]专利说明书ep 2670880 b1,“verfahren zum erzeugen einer dreidimensionalen struktur sowie dreidimensionale struktur”(用于产生三维结构的方法,以及三维结构)[0141][15]公开文献de 102016215616 a1,“verfahren zum herstellen einer magneticischen struktur”(用于产生磁性结构的方法)。
本文地址:https://www.jishuxx.com/zhuanli/20240726/123368.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表