一种界面重构的粘附/脱附控制结构及方法
- 国知局
- 2024-07-27 12:46:28
1.本发明属于微纳工程仿生设计技术领域,具体涉及一种界面重构的粘附/脱附控制结构及方法。背景技术:2.在干粘附结构表面的应用过程中,如何实现高强度粘附与可控脱附是干粘附研究领域的重要方面。德国马普研究院del campo等人研究发现蘑菇状结构能够实现高强度粘附特性,然而蘑菇状阵列结构由于形貌的对称性,表现出各向等同的粘附强度,无法实现有效可控的脱附;美国卡内基梅隆大学mentin sitti教授、美国加州大学圣巴巴拉分校jacob n.israelachvili教授等人研究的基于倾斜微结构阵列的各向异性结构功能表面,能够实现干粘附表面的可控脱附,然而前提是以牺牲粘附强度为代价的。3.在保证粘附强度的前提下,调控接触面积也是实现脱附的一种有效方法,然而,如何实现接触面积的灵活调控是目前面临的难题。因此,对接触面积的灵活调控是实现高强度粘附与可控脱附的技术难点。技术实现要素:4.为了解决上述现有技术的缺点,本发明的目的在于提供一种界面重构的粘附/脱附控制结构及方法,实现接触面积的灵活调控,从而实现高强度粘附与可控脱附。5.为了达到上述目的,本发明采取的技术方案为:6.一种界面重构的粘附/脱附控制结构,包含两层结构,顶层为干粘附结构层2;底层为人工肌肉调控层,包括人工肌肉结构3和支撑结构4;干粘附结构层2支撑在人工肌肉结构3和支撑结构4顶部,人工肌肉结构3和支撑结构4底部连接在基底5上。7.所述的干粘附结构层2为蘑菇状阵列结构。8.所述的干粘附结构层2采用弹性体材料;人工肌肉结构3采用柱状的柔性智能材料,柔性智能材料嵌入电热丝;支撑结构4采用高弹性模量材料的柱状结构。9.所述的弹性体材料为聚二甲基硅氧烷pdms,柔性智能材料为液晶弹性聚合物lce,高弹性模量材料为特氟龙。10.利用一种界面重构的粘附/脱附控制结构的方法,包括以下步骤:11.第一步,无外场作用下,人工肌肉结构3保持初始形貌,干粘附结构层2和被粘附物体1的粘附界面处于高强度粘附状态;12.第二步,加入外场,电热丝产生的热量使人工肌肉结构3发生热致收缩变形,导致干粘附结构层2和被粘附物体1的粘附界面发生重构,顶层干粘附区域与被粘附物体1的接触面积逐渐减小,使粘附界面从高强度粘附状态转变为低强度粘附状态;13.第三步,在低强度粘附状态下,拉动界面重构的粘附/脱附结构,使干粘附结构层2和被粘附物体1的粘附界面发生分离,实现可控脱附效果;14.第四步,撤去外场,人工肌肉结构3在弹性作用下恢复初始形貌,干粘附结构层2实现还原。15.本发明的有益效果:本发明能够在保持干粘附结构高粘附强度的前提下,通过外场对人工肌肉结构进行调控,导致粘附界面发生重构,实现接触面积的灵活调控,从而实现高强度粘附与可控脱附;本发明控制方法可广泛用于无人机寄居、机械手增强操作、医疗辅助等技术领域。附图说明16.图1为控制结构未施加外场时高强度粘附状态下的示意图。17.图2为控制结构施加外场时低强度粘附状态下的示意图。18.图3为控制结构施加外场时低强度粘附状态下界面发生分离的示意图。19.图4为控制结构撤去外场时干粘附结构层实现还原的示意图。具体实施方式20.下面结合附图对本发明做详细描述。21.参照图1-图4,一种界面重构的粘附/脱附控制结构,包含两层结构,顶层为干粘附结构层2,干粘附结构层2为蘑菇状阵列结构;底层为人工肌肉调控层,包括人工肌肉结构3和支撑结构4;干粘附结构层2支撑在人工肌肉结构3和支撑结构4顶部,人工肌肉结构3和支撑结构4底部连接在基底5上。22.所述的干粘附结构层2采用聚二甲基硅氧烷pdms等弹性体材料;所述的人工肌肉结构3采用柱状液晶弹性聚合物lce等柔性智能材料,柔性智能材料嵌入电热丝;支撑结构4采用特氟龙等高弹性模量材料的柱状结构。23.利用一种界面重构的粘附/脱附控制结构的方法,包括以下步骤:24.第一步,无外场作用下,人工肌肉结构3保持初始形貌,不发生收缩变形,干粘附结构层2和被粘附物体1的粘附界面处于高强度粘附状态,如图1所示;25.第二步,加入外场,本实施例采用电场形式,电热丝在外加电场的作用下发生电热效应,产生的热量使人工肌肉结构3发生热致收缩变形,导致干粘附结构层2和被粘附物体1的粘附界面发生重构,顶层干粘附区域与被粘附物体1的接触面积逐渐减小,使粘附界面从高强度粘附状态转变为低强度粘附状态,如图2所示;26.第三步,在低强度粘附状态下,轻轻拉动界面重构的粘附/脱附结构,使干粘附结构层2和被粘附物体1的粘附界面发生分离,实现可控脱附效果,如图3所示;27.第四步,撤去外场,人工肌肉结构3在弹性作用下恢复初始形貌,干粘附结构层2实现还原,如图4所示。28.本发明通过外场对人工肌肉结构进行调控,导致粘附界面发生重构,实现接触面积的灵活调控,从而实现高强度粘附与可控脱附。技术特征:1.一种界面重构的粘附/脱附控制结构,其特征在于:包含两层结构,顶层为干粘附结构层(2);底层为人工肌肉调控层,包括人工肌肉结构(3)和支撑结构(4);干粘附结构层(2)支撑在人工肌肉结构(3)和支撑结构(4)顶部,人工肌肉结构(3)和支撑结构(4)底部连接在基底(5)上。2.根据权利要求1所述的一种界面重构的粘附/脱附控制结构,其特征在于:所述的干粘附结构层(2)为蘑菇状阵列结构。3.根据权利要求1所述的一种界面重构的粘附/脱附控制结构,其特征在于:所述的干粘附结构层(2)采用弹性体材料;人工肌肉结构(3)采用柱状的柔性智能材料,柔性智能材料嵌入电热丝;支撑结构(4)采用高弹性模量材料的柱状结构。4.根据权利要求3所述的一种界面重构的粘附/脱附控制结构,其特征在于:所述的弹性体材料为聚二甲基硅氧烷pdms,柔性智能材料为液晶弹性聚合物lce,高弹性模量材料为特氟龙。5.利用权利要求3所述的一种界面重构的粘附/脱附控制结构的方法,包括以下步骤:第一步,无外场作用下,人工肌肉结构(3)保持初始形貌,干粘附结构层(2)和被粘附物体(1)的粘附界面处于高强度粘附状态;第二步,加入外场,电热丝产生的热量使人工肌肉结构(3)发生热致收缩变形,导致干粘附结构层(2)和被粘附物体(1)的粘附界面发生重构,顶层干粘附区域与被粘附物体(1)的接触面积逐渐减小,使粘附界面从高强度粘附状态转变为低强度粘附状态;第三步,在低强度粘附状态下,拉动界面重构的粘附/脱附结构,使干粘附结构层(2)和被粘附物体(1)的粘附界面发生分离,实现可控脱附效果;第四步,撤去外场,人工肌肉结构(3)在弹性作用下恢复初始形貌,干粘附结构层(2)实现还原。技术总结一种界面重构的粘附/脱附控制结构及方法,控制结构包含两层结构,顶层为干粘附结构层;底层为人工肌肉调控层,包括人工肌肉结构和支撑结构;干粘附结构层支撑在人工肌肉结构和支撑结构顶部,人工肌肉结构和支撑结构底部连接在基底上;方法是通过外场作用,人工肌肉结构发生收缩变形,导致粘附界面发生重构,使粘附界面从高强度粘附状态转变为低强度粘附状态;在低强度粘附状态下,拉动界面重构的粘附/脱附结构,使干粘附结构层和被粘附物体的粘附界面发生分离,实现可控脱附效果;撤去外场,人工肌肉结构在弹性作用下恢复初始形貌,干粘附结构层实现还原;本发明实现接触面积的灵活调控,从而实现高强度粘附与可控脱附。从而实现高强度粘附与可控脱附。从而实现高强度粘附与可控脱附。技术研发人员:邵金友 田洪淼 赵里萌 宋晓雯 李祥明 陈小亮 王春慧 陈小明 张维天 刘浩然受保护的技术使用者:西安交通大学技术研发日:2022.04.28技术公布日:2022/8/30
本文地址:https://www.jishuxx.com/zhuanli/20240726/123520.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
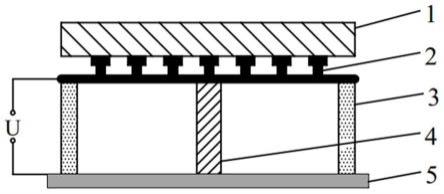
下一篇
返回列表