用于液体环境二维接触面及三维悬浮空间的激光操控系统
- 国知局
- 2024-07-27 13:03:26
本技术涉及一种脉冲激光操控微纳物体技术,特别涉及一种用于液体环境二维接触面及三维悬浮空间的激光操控系统。
背景技术:
1、光学操控技术作为微纳尺度下研究物体运动及其相互作用的主要技术手段之一,因其具有非接触、无损伤、高灵敏度等优点,在微流体传感器、微流体控制、片上集成以及生物医疗等领域被广泛应用。
2、大多数现有的流控相关纳米器件和微机械结构都是在液体环境中的二维接触面上集成或组装的,如微流控芯片、晶元等,因此需要在接触面上实现直接且精准的微纳操控。而现有的传统光镊技术,通过紧聚焦大功率激光光束只能产生飞牛到皮牛(10-15-10-12n)量级的光梯度力,远小于微纳物体和衬底直接接触产生的微牛(10-6n)量级阻力。导致相关技术即使在液体环境中,也只能针对悬浮的少数目标物体进行操控;或者需要结合其它手段,如表面润滑,在接触面涂覆一层有一定厚度的相变材料,减小表面摩擦,才能操控与衬底接触面间接接触的微纳物体。故相关的传统技术还无法满足同时操控衬底接触面上和悬浮空间中微纳物体的需求,且伴有输出力小、局限性强、应用范围窄等缺点。
技术实现思路
1、针对传统光镊技术的即使在液体环境中也无法同时操控衬底接触面上和悬浮空间中的微纳物体,且输出力小、操纵精度低的问题,提出了一种用于液体环境二维接触面及三维悬浮空间的激光操控系统。
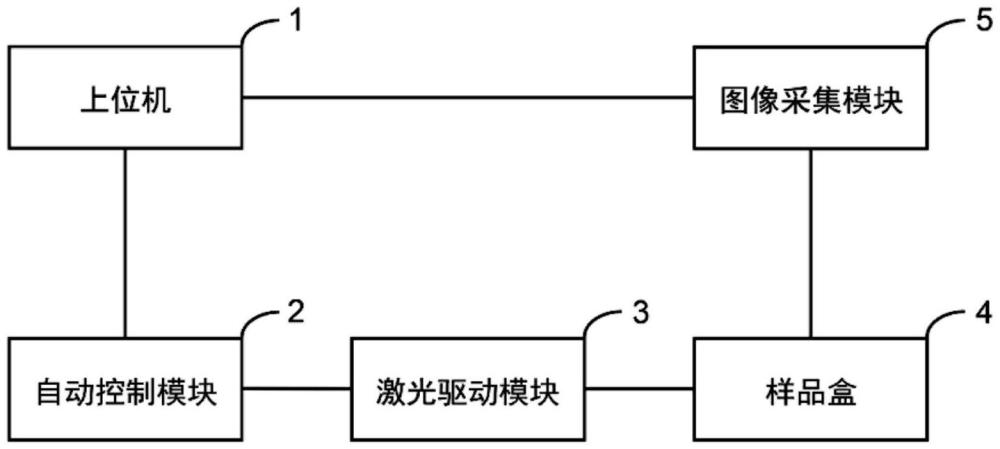
2、本实用新型的技术方案为:一种用于液体环境二维接触面及三维悬浮空间的激光操控系统,包括上位机、自动控制模块、激光驱动模块、样品盒和图像采集模块;
3、所述上位机,用于设定激光驱动模块各部件的控制参数,或者样品盒中微纳物体移动路径参数;
4、所述自动控制模块,用于产生控制信号,根据上位机设定的控制参数,调制激光驱动模块中激光器参数,实现脉冲操控激光的输出;以及激光驱动模块中二维扫描振镜控制电压和三维电动位移台移动信号,实现操控样品盒中微纳物体的运动;
5、所述激光驱动模块,用于产生操控光路,接收自动控制模块的控制信号,由连续激光变为脉冲激光输出并入射至样品盒中,对微纳物体进行操控;
6、所述图像采集模块用于对样品盒中微纳物体实时成像,观察微纳物体的操控过程,并将图像反馈回上位机。
7、优选的,所述自动控制模块包括嵌入式处理器、数模转换模块和电源管理模块,
8、所述嵌入式处理器,用于计算处理输入的控制参数并得到控制各部件所需的数字信号;所述数模转换模块,用于生成和嵌入式处理器输出的数字信号对应的模拟驱动信号;所述电源管理模块,用于满足嵌入式处理器和数模转换模块不同的供电需求。
9、优选的,所述自动控制模块还包括lcd触控显示模块,所述lcd触控显示模块用于与嵌入式处理器通讯,输入和显示控制参数。
10、优选的,所述自动控制模块包括两种工作模式:主机模式和从机模式;主机模式下,所述嵌入式处理器与lcd触控显示模块相连接,通过lcd触控显示模块获取操控微纳物体所需的各部件的控制参数;从机模式下,所述嵌入式处理器与上位机相连接,通过上位机获取操控微纳物体所需的各部件的控制参数。
11、优选的,所述激光驱动模块包括激光器、光路单元、二维扫描振镜、和三维电动位移台;所述激光器,用于产生连续激光信号;所述光路单元,用于引导操控光路入射到微纳物体上;所述二维扫描振镜和三维电动位移台分别用于调节类光阱和微纳物体的相对位置,实现对微纳物体的操控。
12、优选的,所述激光器波长的调节范围:300nm-2μm,脉宽的调节范围:1ns-100μs,重复频率的调节范围:≤100khz。
13、优选的,所述激光器的重复频率以及平均功率参数进行调整,以此实现对微纳物体移动速度和精度控制。
14、优选的,所述微纳物体为位于衬底接触面上纳米线或悬浮在样品溶液中的纳米线或纳米片。
15、本实用新型的有益效果在于:本实用新型用于液体环境二维接触面及三维悬浮空间的激光操控系统,结构简单,易于搭建,与现有光镊的设备高度匹配兼容,在其基础上,只需将原连续激光信号调制为脉冲激光信号,即可在液体环境下同时实现对二维接触面及三维悬浮空间中微纳物体的驱动、捕获和操控。本实用新型利用光热冲击效应克服二维衬底接触面产生的摩擦阻力及三维悬浮空间产生的粘滞阻力,在现有传统光镊技术只适用于液体三维悬浮空间或与衬底间接接触的基础上,增加了二维接触面上的物体操控,拓展了传统光镊的物体操控纬度及应用场景,具有更强的灵活性、普适性和发展潜力;依靠微处理器(arm)和可编程逻辑器件(fpga),本实用新型可以通过编程语言实现自动化和计算机控制,进而保证操控高效且精准。
技术特征:1.一种用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,包括上位机、自动控制模块、激光驱动模块、样品盒和图像采集模块;
2.根据权利要求1所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述自动控制模块包括嵌入式处理器、数模转换模块和电源管理模块,
3.根据权利要求2所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述自动控制模块还包括lcd触控显示模块,所述lcd触控显示模块用于与嵌入式处理器通讯,输入和显示控制参数。
4.根据权利要求3所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述自动控制模块包括两种工作模式:主机模式和从机模式;主机模式下,所述嵌入式处理器与lcd触控显示模块相连接,通过lcd触控显示模块获取操控微纳物体所需的各部件的控制参数;从机模式下,所述嵌入式处理器与上位机相连接,通过上位机获取操控微纳物体所需的各部件的控制参数。
5.根据权利要求1所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述激光驱动模块包括激光器、光路单元、二维扫描振镜、和三维电动位移台;所述激光器,用于产生连续激光信号;所述光路单元,用于引导操控光路入射到微纳物体上;所述二维扫描振镜和三维电动位移台分别用于调节类光阱和微纳物体的相对位置,实现对微纳物体的操控。
6.根据权利要求2所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述激光器波长的调节范围:300nm-2μm,脉宽的调节范围:1ns-100μs,重复频率的调节范围:≤100khz。
7.根据权利要求2所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述激光器的重复频率以及平均功率参数进行调整,以此实现对微纳物体移动速度和精度控制。
8.根据权利要求1所述用于液体环境二维接触面及三维悬浮空间的激光操控系统,其特征在于,所述微纳物体为位于衬底接触面上或悬浮在样品溶液中的纳米线或纳米片。
技术总结本技术涉及一种用于液体环境二维接触面及三维悬浮空间的激光操控系统,即在现有传统光镊设备的基础上,只需将原连续激光信号调制为脉冲激光信号,便可在液体环境下同时实现对二维接触面及三维悬浮空间中微纳物体的驱动、捕获和操控。本技术适用于液体环境中,利用微纳物体吸收脉冲激光产生的瞬态光热冲击,来克服二维衬底接触面直接产生的摩擦阻力及三维悬浮空间产生的粘滞阻力。与现有传统光镊技术只适用于液体三维悬浮空间或与衬底间接接触的条件相比,本技术增加了二维接触面上的物体操控,拓展了传统光镊的物体操控维度及应用场景,具有更强的灵活性、普适性和发展潜力;依靠微处理器和可编程逻辑器件,进而保证操控高效且精准。技术研发人员:谷付星,朱润琳,窦琳,张尹峥,顾兆麒受保护的技术使用者:上海理工大学技术研发日:20230824技术公布日:2024/3/24本文地址:https://www.jishuxx.com/zhuanli/20240726/124720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表