一种基于连杆摇臂的环形联动装置的制作方法
- 国知局
- 2024-07-30 14:51:38
本发明属于机械设计领域,是一种基于连杆摇臂的环形联动装置。
背景技术:
1、在机械设计领域中,像离心式压缩机、燃气轮机压气机或轴流风机中都有可能使用到可调导叶系统,可调导叶系统可以通过进气口的导叶角度调节实现调整进气量的目的,而进气口的导叶由于数量较多,调节过程中便牵涉到多轴环形联动问题,即,需要使用一种机械装置,可使环形放射状安装布置的导叶实现同步转动的功能。
2、常规解决该种多轴环形联动问题时,采用并联式联动机构,即,由空间联动环的螺旋运动带动整周支链上的转轴同步转动。但是这种机构由于联动环本身重量较大,靠整周支链支撑,受力情况不佳,且各个支链间存在尺寸误差,当联动环通过尺寸不一的支链与静平台连接,容易产生过约束,对整个装置的加工精度和装配精度提出了很高的要求。
技术实现思路
1、本发明的目的在于:提出一种可以摆脱笨重的并联联动环,实现多轴同步转动的功能的基于连杆摇臂的环形联动装置。
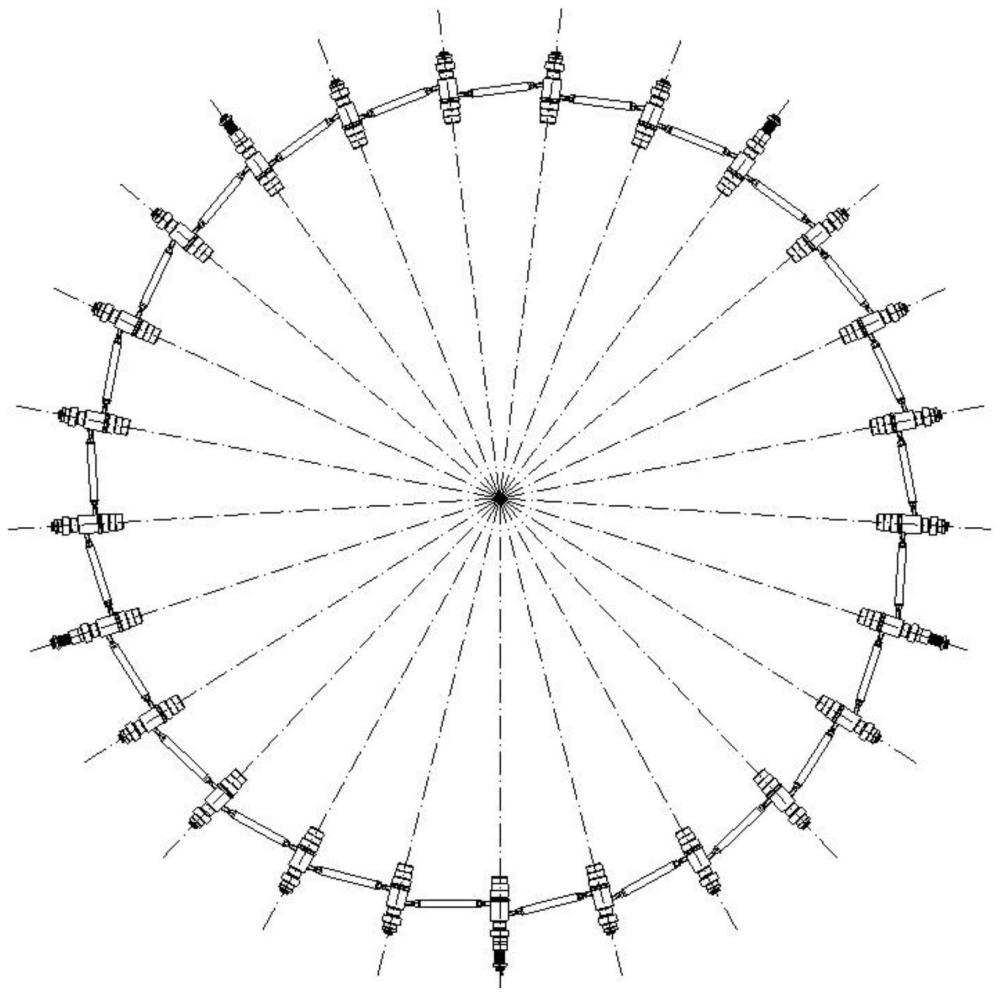
2、为实现上述目的,本发明的具体技术方案如下:一种基于连杆摇臂的环形联动装置,有多个组成单元串联成环形结构;每个组成单元包括转轴,转轴的外圆周表面设置有连接部,连接部上设置有可摆动运动的连杆总成,连杆总成为两个,两个连杆总成的自由端指向相反方向,分别与相邻的组成单元连接。
3、优选地,所述连接部具有两相对平行的侧表面,两个侧表面上均连接有短轴,短轴外周安装有带动连杆摆动的关节轴承,连杆与关节轴承活动连接。
4、优选地,所述连杆总成包括连杆本体和连接臂,二者之间长度可调节。
5、优选地,所述连杆为具有内螺纹,连杆的两端分别与各自对应的连接臂连接;连接臂包括具有与连杆内螺纹配合的螺杆及与螺杆连接的摆臂,螺杆用于与连杆螺纹连接,摆臂上具有与关节轴承外径匹配的连接孔,连接臂的摆臂通过连接孔套装在关节轴承的外圆周表面。
6、优选地,所述连接部为摇臂,摇臂与转轴垂直。
7、优选地,所述摇臂底面为弧形,开口朝向转轴,并与转轴外周面贴合。
8、优选地,所述摇臂通过平键与转轴的外圆周表面固定连接,摇臂与转轴同步转动。
9、优选地,两个所述设置在摇臂两相对表面的转轴的轴线夹角为14°。
10、优选地,相邻两个所述组成单元连接状态下,前一个组成单元的连杆所连接的短轴与其相邻的组成单元的连杆所连接的短轴不在连接部的同一侧。
11、优选地,每根所述转轴与机架连接,且与机架间的运动副为转动副,每根所述连杆和转轴上的摇臂间的运动副为球副。
12、本发明带来的有益效果为:
13、1.将并联式联动机构改成串联式联动机构,通过rssr机构构型,保证转轴转矩的环形传递,省去体积庞大的并联联动环,达到了轻量化的设计目的。
14、2.rssr机构构型中的球副及关节轴承的径向游隙能大大降低摇臂及转轴零部件的参数敏感性,从而降低零部件的加工精度要求;
15、3.可调连杆的设计可以相对自由地调整连杆长度以适应安装,大大降低了装配难度及工作量。
技术特征:1.一种基于连杆摇臂的环形联动装置,其特征在于:有多个组成单元串联成环形结构;每个组成单元包括转轴,转轴的外圆周表面设置有连接部,连接部上设置有可摆动运动的连杆总成,连杆总成为两个,两个连杆总成的自由端指向相反方向,分别与相邻的组成单元连接。
2.如权利要求1所述的一种基于连杆摇臂的环形联动装置,其特征在于:所述连接部具有两相对平行的侧表面,两个侧表面上均连接有短轴,短轴外周安装有带动连杆摆动的关节轴承,连杆与关节轴承活动连接。
3.如权利要求1所述的一种基于连杆摇臂的环形联动装置,其特征在于:所述连杆总成包括连杆本体和连接臂,二者之间长度可调节。
4.如权利要求3所述的一种基于连杆摇臂的环形联动装置,其特征在于:所述连杆为具有内螺纹,连杆的两端分别与各自对应的连接臂连接;
5.如权利要求1所述的一种基于连杆摇臂的环形联动装置,其特征在于:所述连接部为摇臂,摇臂与转轴垂直。
6.如权利要求5所述的一种基于连杆摇臂的环形联动装置,其特征在于:所述摇臂底面为弧形,开口朝向转轴,并与转轴外周面贴合。
7.如权利要求6所述的一种基于连杆摇臂的环形联动装置,其特征在于:所述摇臂通过平键与转轴的外圆周表面固定连接,摇臂与转轴同步转动。
8.如权利要求6所述的一种基于连杆摇臂的环形联动装置,其特征在于:两个所述设置在摇臂两相对表面的转轴的轴线夹角为14°。
9.如权利要求2所述的一种基于连杆摇臂的环形联动装置,其特征在于:相邻两个所述组成单元连接状态下,前一个组成单元的连杆所连接的短轴与其相邻的组成单元的连杆所连接的短轴不在连接部的同一侧。
10.如权利要求1所述的一种基于连杆摇臂的环形联动装置,其特征在于:每根所述转轴与机架连接,且与机架间的运动副为转动副,每根所述连杆和转轴上的摇臂间的运动副为球副。
技术总结本发明属于机械设计领域,公开了一种基于连杆摇臂的环形联动装置,有多个组成单元串联成环形结构;每个组成单元包括转轴,转轴的外圆周表面设置有连接部,连接部上设置有可摆动运动的连杆总成,连杆总成为两个,两个连杆总成的自由端指向相反方向,分别与相邻的组成单元连接。串联式联动机构,通过RSSR机构构型,保证转轴转矩的环形传递,省去体积庞大的并联联动环,达到了轻量化的设计目的。技术研发人员:杨誉尧,许寒冰,程遥,刘晖,卫琛喻,叶楠,滕森,黄利华,邬成杰,张根泉受保护的技术使用者:中国船舶集团有限公司第七〇八研究所技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240729/168610.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表