一种基于卫星授时的高精度守时方法及系统与流程
- 国知局
- 2024-07-30 09:36:38
1.本发明涉及无线通信技术领域,尤其涉及一种基于卫星授时的高精度守时方法及系统。背景技术:2.基站设备上广泛使用ocxo模组来保证守时性能。模组内置高精度恒温晶振,自带算法,使用时将授时模块的输出接入模组,模组会利用其解析出的1pps,通过建模和学习来驯服自己的恒温晶振。当参考源丢失后,模组会进入守时模式,根据建模数据模拟1pps输出。根据运营商要求,参考源丢失后的24小时内1pps相位漂移不超过+/-1.5us。为保证守时性能,关键是保证良好的驯服建模过程,其很大程度上受到授时模块的授时精度的影响,较高的相位抖动,不稳定的1pps输出,特别是在参考丢失瞬间引入的瞬时跳变等都会严重影响驯服建模效果。3.再有,gps授时方式受天气状况的影响比较明显,不能避免出现连续的,间隔时间较短的卫星信号丢失。如果每次信号丢失ocxo模组都要启动守时功能,驯服过程就会被中断,ocxo 模组会在驯服模式和守时模式下频繁切换,严重影响建模效果。当长时间的卫星信号丢失发生时,由于ocxo模组驯服时间不足或驯服过程不连续,导致建模数据不理想,就达不到预期的守时效果。技术实现要素:4.本发明的目的针对ocxo模组和授时模块个体性能差异较大,两者适配性差的问题,提供一种基于卫星授时的高精度守时方法及系统,旨在改善ocxo模组的建模数据,保证ocxo模组在卫星信号存在的驯服建模阶段,能得到良好的建模数据;在卫星参考信号丢失到ocxo模组进入守时状态期间,通过辅助电路和精细化的控制流程对ocxo模组进行持续驯服,保证1pps不会发生突变,保证了建模数据的稳定可靠,提高了模块的守时精度;在持续驯服的同时,提供短期守时功能,推迟模组长期守时功能的开启时间,提高电路整体的守时性能和守时精度。5.本发明的目的是通过以下技术方案来实现的:一种基于卫星授时的高精度守时方法,包括:接收北斗/gps卫星参考信号进行解析,获得1pps信号并进行去抖处理;将去抖处理后的1pps信号接入ocxo模组进行驯服建模,改善建模数据;在卫星参考信号丢失后,先后利用时钟芯片的holdover和ocxo模组的自由振荡模式分时间段进行短期守时和驯服建模;在卫星参考信号恢复时切换回gps参考模式,并由gps源继续驯服;若卫星信号丢失时间达到预设时间(n+m)s时,停止驯服并切换至长期守时模式。6.具体的,所述利用时钟芯片的holdover和ocxo模组的自由振荡模式分时间段进行短期守时和驯服建模过程具体包括:在卫星参考信号丢失后,首先令时钟芯片锁定tcxo并工作在holdover模式,用holdover模式下的1pps信号驯服ocxo模组并且用holdover模式下的1pps信号去实现短期守时;当holdover模式下的1pps信号相位漂移达到预设信号切换条件(预设时间ns)时,时钟芯片切换并锁定到ocxo模组自由振荡输出的1pps信号,用ocxo模组自由振荡输出的1pps信号自驯服ocxo模组并实现短期守时;当ocxo模组输出的1pps信号相位漂移达到即将影响驯服建模数据的程度,即预设时间(n+m)s时,令ocxo模组切换至长期守时模式。7.其中,预设信号切换条件(预设时间ns)为根据时钟芯片能力设定的相位漂移时间。时钟芯片的holdover模式在开始的一段时间内输出的1pps信号比ocxo模组自由自由振荡输出的1pps信号更稳定,当超过这段时间,则ocxo自由振荡产生1pps信号更稳定,1pps的相位相对漂的更慢,就改用ocxo自由振荡产生的1pps信号来做驯服和守时。8.影响到驯服建模数据的标准是1pps信号的相位漂移位置,根据ocxo模组驯服时对1pps信号相位漂移的要求,设定信号相位漂移值不超过50ns;ocxo 0.1ppb级别的稳定度,漂移到50ns至少可以坚持8分钟以上,期间不会对驯服数据造成影响,并且1pps信号50ns的相位漂移量完全满足1.5us的守时要求,可以在驯服的同时提供良好的守时功能。9.具体的,步骤4具体包括:在用holdover模式下的1pps信号和ocxo模组自由振荡输出的1pps信号进行驯服建模过程中,若卫星参考信号恢复,则切换ocxo模组状态为gps参考驯服模式;若卫星信号丢失时间达到预设时间(n+m)s时,停止驯服并强制切换ocxo模组至长期守时模式,ocxo模组不再处理接收到的1pps信号,将当前ocxo模组输出的1pps信号进行去抖并锁定来实现长期守时。10.具体的,所述获得1pps信号并进行去抖处理过程具体为将北斗/gps卫星参考信号解析出的1pps信号接入时钟芯片,利用时钟芯片内部数字锁相环mhz级别的环路带宽对1pps进行去抖处理。11.具体的,所述将去抖处理后的1pps信号接入ocxo模组进行驯服建模过程采用ocxo模组自带的算法实现。12.一种基于卫星授时的高精度守时系统,用于实现上述的一种基于卫星授时的高精度守时方法,包括gps接收机、mcu模块、选择器、时钟芯片、tcxo、buffer模块、模块电路和ocxo模组;选择器分别与gps接收机、时钟芯片和ocxo模组连接;mcu模块通过spi接口连接选择器;时钟芯片分别与tcxo、buffer模块和模块电路连接;ocxo模组分别与buffer模块和选择器连接。13.本发明的有益效果:本发明通过改善模块建模时驯服数据的精度提高守时能力;以及在卫星信号丢失前期,通过辅助电路等提供守时功能并继续驯服ocxo模组,推迟ocxo模组守时功能开启时间,提高电路整体的守时性能和守时精度;对于短时间内出现的卫星信号丢失通过短期守时功能应对,而不用启动ocxo模组的守时功能,并且保持了ocxo模组驯服建模的连续性,更好的应对卫星信号长期丢失的情况。附图说明14.图1是本发明的方法流程图;图2是本发明系统结构示意图;图3是本发明的控制流程图;图4是本发明与现有技术在驯服建模数据上的对比图;图5是本发明的守时精度实测图。具体实施方式15.为了对本发明的技术特征、目的和有益效果有更加清楚的理解,现对本发明的技术方案精选以下详细说明。显然,所描述的实施案例是本发明一部分实施例,而不是全部实施例,不能理解为对本发明可实施范围的限定。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的其他所有实施例,都属于本发明的保护范围。16.实施例一:本实施例中,如图1所示,一种基于卫星授时的高精度守时方法,方法先接收北斗/gps卫星参考信号进行解析,再获得1pps信号并进行去抖处理;然后将去抖处理后的1pps信号接入ocxo模组进行驯服建模,改善建模数据;在卫星参考信号丢失后,先后利用时钟芯片的holdover和ocxo模组的自由振荡模式分时间段进行短期守时和驯服建模;在卫星参考信号恢复时切换回gps参考模式,并由gps源继续驯服;若卫星信号丢失时间达到预设时间(n+m)s时,停止驯服并切换至长期守时模式。17.其中,pps(秒脉冲)是pulse per second 的简写,1pps=1hz=1次/秒。时钟模块上的gps接收机负责接收gps天线传输的射频信号,然后进行变频解调等信号处理,向基站提供1pps信号,进行同步。18.gps时钟主要分为两类,一类是gps授时仪,主要输出时标信息,包括1pps及tod信息;另外一类是gps同步时钟,后者输出利用卫星信号驯服ocxo或者铷钟得到的高稳定频率信息,以及本地恢复的更平稳的时标信号。19.由于gps信号受电离层延时误差,对流层延时误差,多径效应和接收机噪声等影响,gps接收机恢复出来的pps信号存在一定的随机抖动误差,这个随机抖动误差服从正太分布。除此之外,gps信号不稳定,存在信号丢失的可能。因此,在gps 时钟系统中加入恒温晶振来解决gps信号丢失后的守时问题。20.由上所述,gps信号存在随机抖动,但误差不会随着时间累计。恒温晶振刚好相反,短期稳定性好,随机误差较小。gps驯服时钟的基本原理就是利用恒温晶振来产生pps信号,然后利用gps信号来消除恒温晶振的累计误差。21.对恒温晶振驯服主要有两种方法:将gps的pps 信号与恒温晶振(ocxo)产生的pps信号的相位差转换为对恒温晶振调整的电压调节量,从而控制晶振的振荡周期,使晶振时钟趋于标准值。这种方法同步的精度较高,但实现复杂。另外一种是使用这个相位差来调整恒温晶振输出pps信号时的分频值。这种方法精度不高,但实现简单。在相位同步后,即使gps信号丢失,恒温晶振在短期时间内依然可以稳定的输出pps信号。22.因此,本实施例在卫星参考信号丢失后,先后利用时钟芯片的holdover和ocxo模组的自由振荡模式分时间段进行短期守时和驯服建模,在卫星参考信号恢复时切换至gps参考模式,并由gps源继续驯服;若信号长时间丢失,停止驯服并切换至长期守时模式。23.其中,利用时钟芯片的holdover和ocxo模组的自由振荡模式分时间段进行短期守时和驯服建模过程具体包括:在卫星参考信号丢失后,首先令时钟芯片锁定tcxo并工作在holdover模式,用holdover模式下的1pps信号驯服ocxo模组并且用holdover模式下的1pps信号去实现短期守时;当holdover模式下的1pps信号相位漂移达到预设信号切换条件(预设时间ns)时,时钟芯片切换并锁定到ocxo模组自由振荡输出的1pps信号,用ocxo模组输出的1pps信号自驯服ocxo模组并实现短期守时;当ocxo模组输出的1pps信号相位漂移达到即将影响驯服建模数据的程度时,即预设时间(n+m)s时,令ocxo模组切换至长期守时模式。24.其中,预设信号切换条件为根据时钟芯片能力设定的相位漂移时间。时钟芯片的holdover模式在开始的一段时间内输出的1pps信号比ocxo模组自由自由振荡输出的1pps信号更稳定,当超过这段时间,则ocxo自由振荡产生1pps信号更稳定,1pps的相位相对漂的更慢,就改用ocxo自由振荡产生的1pps信号来做驯服。影响到驯服建模数据的标准是1pps信号的相位漂移位置,根据ocxo模组驯服时对1pps信号相位漂移的要求,设定信号相位漂移值为50ns;ocxo 0.1ppb级别的稳定度,漂移到50ns至少可以坚持8分钟以上不会对驯服数据造成影响;并且1pps信号50ns的相位漂移量完全满足1.5us的守时要求,可以在驯服的同时提供良好的守时功能。25.进一步的,步骤4具体为:在用holdover模式下的1pps信号和ocxo模组自由振荡输出的1pps信号进行驯服建模过程中,若卫星参考信号恢复,则切换ocxo模组状态为gps参考模式;若卫星信号丢失时间达到预设长期守时时间时,停止驯服并切换至长期守时模式,ocxo模组不再处理接收到的1pps信号,将当前ocxo模组输出的1pps信号进行去抖并锁定。26.本实施例中,将去抖处理后的1pps信号接入ocxo模组进行驯服建模过程采用ocxo模组自带的算法实现,算法包括ocxo高精度时间维持的自适应修正算法、基于ocxo的基站时钟系统保持算法和自适应ocxo漂移校正算法等。27.其中,本发明的驯服建模过程相比原驯服过程的改善点在于:1. 一般的驯服过程是直接将gps解析出的1pps直接拿去做驯服,这样相位抖动较大,驯服数据不理想,守时效果不好;2. 一般的驯服过程在gps卫星丢失后,就会结束驯服进入守时模式,驯服过程容易被中断,多次中断驯服肯定会严重影响守时效果,而本发明做的改善是在遇到卫星短时间丢失时,驯服和守时功能是由时钟芯片的holdover和ocxo模组自由振荡产生的1pps来补上的,驯服不会中断,守时也能维持。只有当遇到真正的,长时间的gps卫星中断情况下,长期守时才会启动。并且由于短期和长期守时是连续的,短期守时结束后,ocxo守时功能才会启动。短期守时期间相位漂移到一定程度的1pps,在ocxo长期守时功能启动后,其相位会回到初始位置重新开始漂移,所以短期守时保持的时间是本技术方案守时精度上的收益,本方案的守时精度明显会更高。28.本实施例提供了一种改善守时模块守时性能的方法,通过改善模块建模时驯服数据的精度提高守时能力;以及在卫星信号丢失前期,通过辅助电路等提供短期守时功能并继续驯服ocxo模组,推迟ocxo模组守时功能开启时间,提高电路整体的守时性能和守时精度;对于短时间内出现的卫星信号丢失通过短期守时功能应对,而不用启动ocxo模组的守时功能,并且保持了ocxo模组驯服建模的连续性,更好的应对卫星信号长期丢失的情况。29.实施例二:本实施例中,如图2所示,提供了一种基于卫星授时的高精度守时系统,用于实现上述实施例一中的高精度守时方法,系统包括gps接收机、mcu模块、选择器、时钟芯片、tcxo、buffer模块、模块电路和ocxo模组;选择器分别与gps接收机、时钟芯片和ocxo模组连接;mcu模块通过spi接口连接选择器;时钟芯片分别与tcxo、buffer模块和模块电路连接;ocxo模组分别与buffer模块和选择器连接。30.本实施例的时钟芯片采用ad9545,gps接收机负责接收gps天线传输的射频信号,然后进行变频解调等信号处理,向基站提供1pps信号,进行同步。31.本实施例针对ocxo模组和授时模块个体性能差异较大,两者适配性差的问题,旨在改善ocxo模组的建模数据,保证ocxo模组在卫星信号存在的驯服建模阶段,能得到良好的建模数据;在卫星参考信号丢失到ocxo模组进入守时状态期间,通过辅助电路和精细化的控制流程对ocxo模组持续驯服,保证1pps不会发生突变,保证了建模数据的稳定可靠,提高了模块的守时精度。32.如图3所示,本实施例系统的控制流程具体为:先接收北斗/gps信号,解析出1pps信号,判断星卡解析的1pps管脚有无输入,若有输入则参考源选择星卡优先,输出星卡解析的1pps信号并进行去抖;若没有输入则关闭参考源选择器。33.接下来,判断时钟芯片管脚是否有输入,若有输入则锁定当前1pps信号,对ocxo模组进行驯服建模,并将信号提供给模块电路。若没有输入,则锁定到tcxo,并配置时钟芯片ad9545进入holdover工作模式,开启短期守时第一阶段,输出1pps信号到ocxo模组进行不间断驯服建模,并将1pps提供给模块电路实现短期守时功能。34.此外,在判断星卡解析的1pps管脚没有输入后,还循环判断卫星参考信号是否丢失超过ns,若超过ns则进入短期守时第二阶段,打开参考源选择器,时钟芯片对ocxo模组自由振荡输出的1pps信号进行去抖处理并锁定,ocxo模组利用其自由振荡输出的1pps信号进行自驯服,并将1pps提供给模块电路实现第二阶段短期守时。若卫星参考信号丢失未超过ns则返回星卡优先的过程。在判断卫星参考信号丢失超过ns后,还进一步判断卫星参考信号丢失是否超过(n+m)s,若超过(n+m)s,强制切换ocxo模组状态为守时模式(即长期守时模式),ocxo模组不再处理接收到的1pps信号,时钟芯片将当前ocxo模组输出的1pps信号进行去抖并锁定。若丢失卫星参考信号未超过(n+m)s则返回星卡优先的过程。35.在卫星丢失的一段时间内,不急于启动ocxo模组的守时功能,而是在这期间分两个时段分别利用时钟芯片的holdover以及ocxo模组的自由振荡模式来实现短期守时功能,并且分别对ocxo模组做不间断的驯服建模。期间如果gps恢复,则平滑切换恢复gps对ocxo模组的驯服,保证在卫星信号多次出现短期丢失情况下ocxo模组驯服的连续性和守时性能的持续性。当卫星信号出现长时间的丢失情况下,ocxo模组守时模式才会启动,因为有前期辅助电路短期守时和驯服的帮助,总的保持时间会更长,精度会更高。36.本实施例中,分别将采用本发明技术方案和现有守时方案的ocxo模组驯服建模数据进行了对比;守时精度方面,现有技术在24小时内的守时精度为2.4us,本发明技术方案在24小时内的守时精度可达到388.24ns,可见,采用本发明的方法可以获得良好的建模数据和守时精度。37.如图4所示,通过ocxo模组的驯服过程检测功能,能反映驯服数据在各个时段的精度是否良好,即驯服1pps的相位漂移数据;图4中横坐标的单位是s;纵坐标中,数字1代表1个6.25ns。图4对比显示,在驯服结束前的40个小时左右,新方案的1pps(驯服数据)最大相位漂移为+/-31.25ns,而现有技术的1pps最大相位漂移为37.5ns;并且从整体上看,与现有技术相比,新方案的驯服数据明显更为收敛。图5是新方案的守时精度测试数据,上方曲线是授时模块解析产生的1pps,用来做触发和参照;下方曲线是gps长时间(24小时以上)丢失情况下,ocxo模组输出的1pps的余晖,整个过程包含短期守时和长期守时两个连续的阶段,在24小时内ocxo模组输出的1pps相对gps产生的1pps漂移了388.24ns,守时精度得到明显提高。38.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由所附的权利要求书及其等效物界定。
本文地址:https://www.jishuxx.com/zhuanli/20240730/150181.html
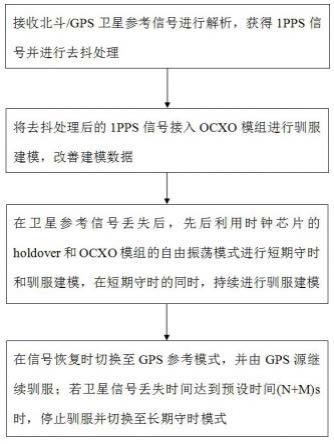
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表