一种基于微小卫星射频测量的多星编队时间同步方法
- 国知局
- 2024-07-30 10:18:30
本发明属于卫星编队时间同步领域,尤其是涉及一种基于微小卫星射频测量的多星编队时间同步方法。
背景技术:
1、随着微小卫星编队逐渐成为航天领域的热点,高精度的星间测量作为微小卫星编队相对导航中的关键支撑技术也得到了愈来愈多的关注。其中,在星间时差测量基础上可以建立星间时间同步,进而为利用测得的星间距离进行导航解算提供统一的时间基准。
2、由于空间环境的频谱资源严重短缺,以及微小卫星功耗和体积的限制,可扩展性差的频分复用(frequency division multiple access,fdma)和码分复用(code divisionmultiple access,cdma)测量体制不适合应用于多星编队。时分复用(time divisionmultiple access,tdma)体制可以有效解决可扩展性问题,典型的例子是全球定位系统(global positioning system,gps)iir/iif和北斗导航星座的星间链路设计。
3、时间同步方法需要考虑两个方面:第一个是采用的时差补偿方法,即如何实现节点本地时间调节;第二个是基于时差补偿方法的卫星编队网络时间同步架构。
4、目前有多种方法能够实现时钟调节,主要包括压控振荡器(voltage controlledoscillator,vco),数控振荡器(numerically controlled oscillator,nco)和全数字振荡器(digitally controlled oscillator,dco)。
5、vco的原理是根据输入的电压值,通过调节vco的输入频率,进而实现节点间的时差补偿。vco振荡器输出的时钟具有良好的占空比,但是模拟器件vco的稳定性欠佳,容易受到环境的影响。
6、dco模块由两个部分组成,一个是产生时钟的cyclic-controlled stage(ccs),另一个是调节相位的coarse-tuning delay stage(ctds)和fine-tuning delay stage(ftds)。ctds负责实现相位的粗调,ftds负责实现相位的细调。dco相位调节的优势是调节精度高,但是缺点是对线路延迟时间的准确度有极高的要求,因此多在专用集成电路中得到应用。nco由一个加法器和一个寄存器构成,通过rom形式的查找表产生时钟信号。nco时差补偿可以通过直接调节时钟频率控制字和相位控制字来实现,容易在fpga上得到实现。但是,nco时差补偿也存在一个不容忽视的问题,由于时域中nco的相位周期性溢出,导致nco产生的时钟具有较大的频率杂散,从而使得补偿后的时钟在频域上的特性严重恶化。现有传感器网络时间同步架构主要有两种,分别为层级树式时钟同步网络架构和分布式时钟网络架构。
7、层级树式时钟中网络中某一节点被分配作为根节点,其余节点根据传感器网络的通信范围等条件,被分配为不同的层级。层级树的时钟同步是逐层进行的,即第一层的节点首先向根节点进行时钟同步,之后第二层向第一层进行时钟同步,依此类推。不难发现,该架构下,根节点时钟将作为整个网络的同步时钟基准,因此根节点时钟的精度决定了整个网络的时钟同步精度。与此同时,层级树结构同步方式的误差会逐层累积,层级数越大的节点的时钟同步精度越差,且其中任何一个节点无法同步会导致其后级的所有子节点无法完成时间同步。层级树式时钟同步网络架构可扩展性较差,随着多星编队卫星数目的增加,层级树结构的层数也会随之增加,这将会对层级数较大的节点带来较大的时间同步误差。
8、分布式时钟同步网络可以有效克服上述缺点,consensus时钟同步网络为一种典型的分布式时钟同步网络。consensus同步网络不再以任何一个节点的时钟作为参考时钟,而是通过节点间的通信和测量,构建出一个虚拟同步时钟,所有节点向虚拟时钟进行同步。该网络架构下的同步时钟由编队内所有节点的本地时钟所决定。consensus同步网络架构存在一个较大的问题,即如果各节点向虚拟时钟进行相位修正的时刻不能保持一致,则会引入较大的同步误差。对于时分体制且各自进行时间同步的卫星编队而言,在无地面站辅助的情况下,难以满足上述条件。同时,consensus网络内任一节点的时钟失效,例如不断跳变,会导致所有节点无法实现向虚拟时钟的同步。consensus时钟同步网络也存在可扩展性差的问题,多星编队卫星数目的增加会增大有卫星发生故障的概率,从而使得consensus网络时钟同步失败。
技术实现思路
1、本发明提供了一种基于微小卫星射频测量的多星编队时间同步方法,经过同步后时钟误差减少至1纳秒左右,具有可扩展性强、同步周期短、同步误差不累计、精度不受限于单一节点、编队内任一卫星时钟失效对编队时间同步的影响小、各节点独立进行时间同步等优势。
2、一种基于微小卫星射频测量的多星编队时间同步方法,其特征在于,包括如下步骤:
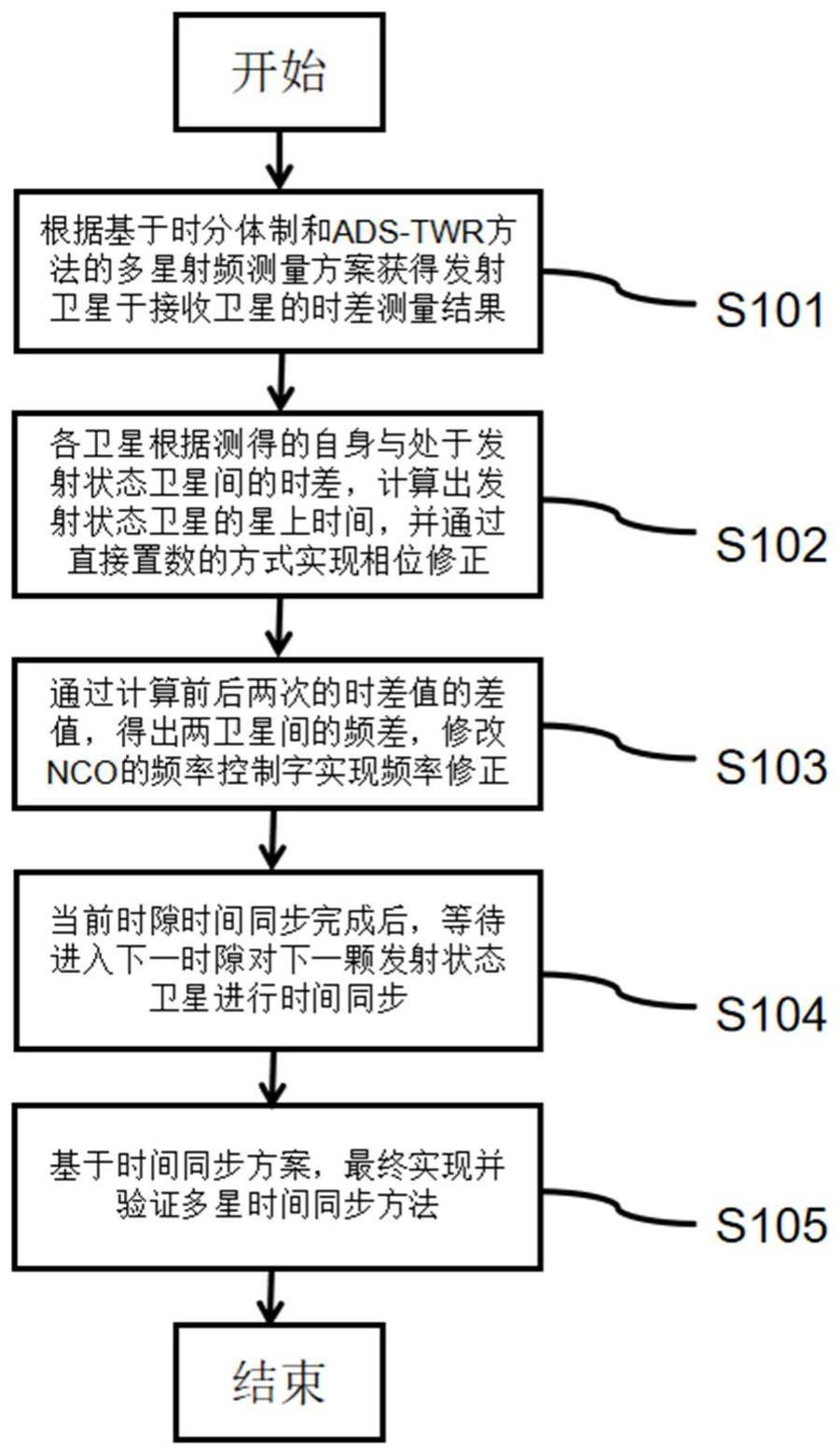
3、(1)采用基于时分体制和非对称双边双程方法的多星射频测量方法获得发射状态卫星与接收状态卫星的时差测量结果;
4、(2)各接收状态卫星根据自身与处于发射状态卫星间的时差,计算出发射状态卫星的星上时间,并通过直接置数的方式实现相位修正;
5、(3)通过计算前后两次时差值的差值,各接收状态卫星得出自身与处于发射状态卫星间的频差,修改nco的频率控制字实现频率修正;
6、(4)当前时隙时间同步完成后,等待进入下一时隙,对下一颗发射状态卫星进行时间同步;
7、(5)依次完成每一颗状态卫星的时间同步,最终实现编队的星间时间同步。
8、步骤(1)的具体过程如下:
9、假设编队内共有k颗卫星,编队内每一颗卫星、单个测量周期内的每一个时隙都配置了编号,编号s1~sk;每一颗卫星占用与自身编号相同的时隙,并且只在自身占用的时隙内发射信号,其它时隙内只接收信号,从而依次完成信号的发射和接收,编队内任意两颗卫星间的三次信号传输即完成一次非对称双边双程测量;
10、两卫星间的时差测量公式为:
11、δt=ta(t4)-rat/c-tb(t3)
12、=[ta(t3)-tb(t3)]+[ta(t4)-ta(t3)-rat/c]
13、其中,ta(t3)、tb(t3)分别为非对称双边双程测量过程中第二次测量时卫星a和b的信号发射时刻,ta(t4)为卫星a的信号接收时刻,rat为星间距离测量值,c为光速;
14、式中,ta(t3)-tb(t3)即为两星时差,而ta(t4)-ta(t3)-rat/c为时差测量的误差项。
15、步骤(2)中,通过直接置数的方式,使得接收状态卫星的时钟与发射状态卫星的时钟保持一致,不同时隙切换不同的发射状态卫星,同时其余接收状态卫星进行一次相位修正。
16、步骤(3)中,两卫星间的频差计算公式为:
17、
18、式中,δf(i)为i时刻的频差,δt(i)为i时刻的时差测量结果,tupdate为时间同步周期时长,flocal为接收卫星本地时钟频率;
19、通过前后两次时差测量结果,计算出对应节点间的频差,并将其反馈到nco的频率控制字上实现频率修正。
20、步骤(3)中,在频率修正后计算同步误差,同步误差表达式为:
21、
22、式中,terror表示最大同步误差,ka和kb分别代表卫星a与卫星b星载时钟源频率与标称频率的比值,f0为标称频率。
23、步骤(3)中,采用dither算法和低通滤波器lpf优化nco产生的星上时钟;
24、其中,dither算法采用一个伪码发生器实现,伪码发生器的位数为36位,其表达式如下:
25、f(x)=1+x11+x36
26、伪码发生器产生的伪码具有伪随机性,将产生的伪码序列整合成一个范围为(0~236-1)的随机数,之后,对产生的随机数进行归一化用于nco杂散的白化;通过dither算法对nco输出进行白化后,通过低通滤波器lpf对产生的噪声进行抑制。
27、低通滤波器lpf采用以x(n)为输入、y(n)为输出的长度为m的有限长单位冲激响应滤波器,通过以下差分方程表示
28、
29、其中,bk代表滤波器系数的集合,采用5阶滤波器,滤波器系数如下式所示
30、h(z)=-0.0232+0.2017z-1+0.4029z-2+0.4029z-3+0.2017z-4+-0.0232z-5。
31、步骤(5)的具体过程为:
32、假设编队内共有k颗卫星,编号分别为s1、s2...sk,k颗卫星依次进入发射状态;
33、当s1进入发射状态时,编队内剩余k-1颗卫星测得自身与s1间的时差,从而以s1为主节点,向s1进行同步;当卫星s1的时隙结束后,卫星s2进入发射状态,s2作为新的主节点,剩余k-1颗卫星向s2进行时间同步,依此类推,实现编队的星间时间同步。
34、与现有技术相比,本发明具有以下有益效果:
35、1、本发明的方法,获得时差测量结果后通过相位修正和频率修正实现时间同步同时,有效解决了时分复用体制下的时间同步问题,具有可扩展性强的优势,适用于大规模编队,为微小卫星多星编队相对导航提供统一的高精度时间基准。
36、2.本发明针对nco产生的时钟具有较大的频率杂散的问题,采用dither算法和lpf优化nco产生的星上时钟。该补偿方法与测量系统在同一硬件平台上实现,大大简化了系统设计。
本文地址:https://www.jishuxx.com/zhuanli/20240730/152312.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表