一种适用于智能手表的表圈旋转自动检测装置及方法与流程
- 国知局
- 2024-07-30 10:30:49
本发明涉及智能手表的表圈旋转自动检测,具体而言,涉及一种适用于智能手表的表圈旋转自动检测装置及方法。
背景技术:
1、手表是人们日常生活中最常见的计时设备,传统的机械手表通过单纯的机械结构实现表圈旋转,通过表圈刻度与内影圈刻度或指针的偏差记录潜水时间,或装饰作用。随着智能手表越来越普及,我们提出了一种混合智能手表,既具备三根实体机械物理指针,又具备智能手表的功能特性(amoled(或lcd)等显示屏、高速处理器、智能支付、离线支付等智能应用),因此需要更多的交互方式,单纯的机械结构旋转远无法满足交互需求。
技术实现思路
1、本发明的目的在于提供一种适用于智能手表的表圈旋转自动检测装置及方法,以改善上述问题。为了实现上述目的,本发明采取的技术方案如下:
2、第一方面,本申请提供了一种适用于智能手表的表圈旋转自动检测装置,包括旋转表圈、旋转检测模块、磁铁、固定中框和混合智能机芯模块,其中旋转表圈底部开设有用于容纳磁铁的凹槽,旋转检测模块设置在固定中框的侧壁上,并通过软排线与混合智能机芯模块连接;混合智能机芯模块固定连接在固定中框上;
3、装配时,旋转表圈与固定中框旋转连接;其中,旋转检测模块和混合智能机芯模块通信连接,旋转检测模块用于检测所处磁场的磁力强度和磁场变化,并形成动态磁场曲线
4、优选地,所述旋转检测模块和混合智能机芯模块通过iic或spi接口进行数据通信。
5、优选地,所述旋转表圈通过八爪弓线卡入固定中框,并与固定中框旋转连接。
6、优选地,所述旋转表圈内环侧壁均匀间隔45度设有八个安装槽,每一个安装槽中设有一磁铁,并将每个磁铁分别进行标号为n1、s1、n2、s2、n3、s3、n4和s4,其中间隔排列的n1、n2、n3和n4为n极极性朝下,s1、s2、s3和s4为s极极性朝下;每个磁铁的磁力大小排列方式为n1=s1>n2=s2>n3=s3>n4=s4。
7、第二方面,本申请还提供了一种适用于智能手表的表圈旋转自动检测方法,其中包括:
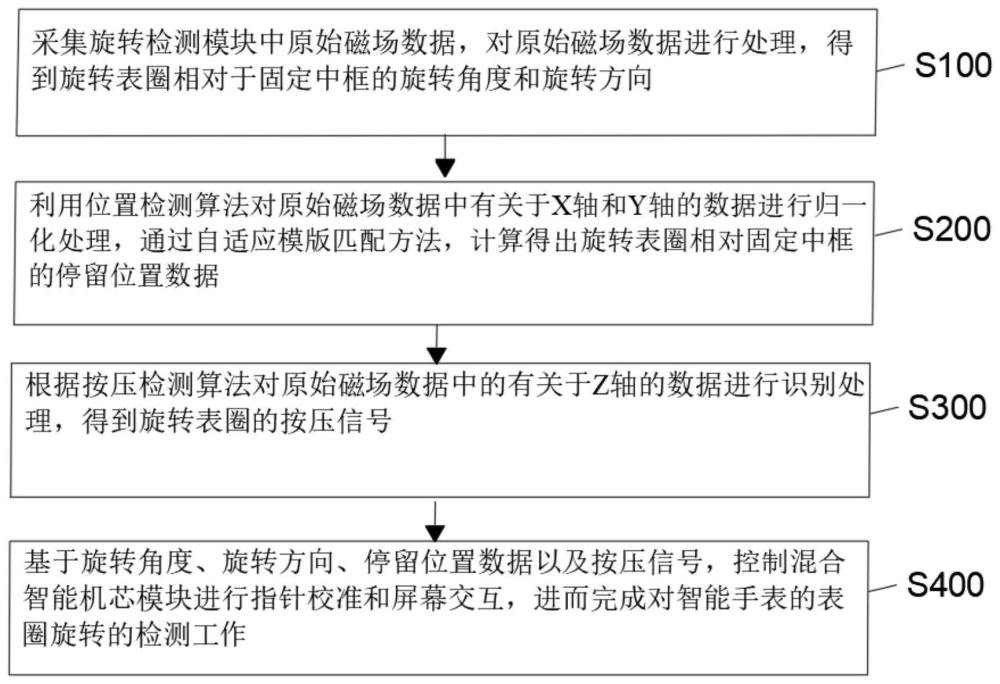
8、采集旋转检测模块中原始磁场数据,对原始磁场数据进行处理,得到旋转表圈相对于固定中框的旋转角度和旋转方向;
9、利用位置检测算法对原始磁场数据中有关于x轴和y轴的数据进行归一化处理,通过自适应模版匹配方法,计算得出旋转表圈相对固定中框的停留位置数据;
10、根据按压检测算法对原始磁场数据中的有关于z轴的数据进行识别处理,得到旋转表圈的按压信号;
11、基于旋转角度、旋转方向、停留位置数据以及按压信号,控制混合智能机芯模块进行指针校准和屏幕交互,进而完成对智能手表的表圈旋转的检测工作。
12、优选地,所述通过自适应模版匹配方法,计算得出旋转表圈相对固定中框的停留位置数据,其中包括:
13、对处理后的x轴和y轴的磁场数据gx(t)和gy(t)进行计算,得到x-y平均磁场强度幅值;
14、采用自适应模版匹配方法,将x-y平均磁场强度幅值和预设的特征磁场强度幅值进行比较,求解得到位置变量;
15、基于位置变量计算得到旋转表圈相对固定中框的停留位置数据,其计算公式如下:
16、
17、其中,degp为停留位置,n为位置变量,n为磁铁数目。
18、优选地,所述根据按压检测算法对原始磁场数据中的有关于z轴的数据进行识别处理,得到旋转表圈的按压信号,其中包括:
19、基于按压检测算法,针对不同采样时刻采集到的z轴磁场数据进行差值计算,得到第一差值,其中第一差值为z轴磁场变化量,其计算公式如下:
20、δgz=gz(t)-gz(t-1)
21、式中,δgz为z轴磁场变化量,gz(t)为当前采样时刻的z轴磁场数据,gz(t-1)为上一次采样时刻的z轴磁场数据;
22、判断第一差值与预设的z轴磁场阈值参数的大小,若第一差值大于预设的z轴磁场阈值参数,则记作一次按压输入信号,若第一差值小于预设的z轴磁场阈值参数,则继续进行差值计算。
23、本发明的有益效果为:
24、本发明提出一种适用于混合智能手表的表圈旋转自动检测方法,主要由结构硬件和软件算法两部分组成,通过两者配合,手表智能机芯能够准确检测手表表圈的旋转、按压和停留等操作,进而通过检测信号来控制调节手表指针、菜单翻转和选中等交互需求。
25、本发明通过结构硬件和软件算法两部分组合,实现旋转表圈相对固定中框的旋转角度、旋转方向、停留位置、按压信号的精准检测;采用3d磁传感器,极大提升了旋转磁场的检测精度和范围。
26、本发明采用检测算法能够自动进行参数校准,优化检测精度;可以解决批生产及使用过程中,由于器件差异、装配公差和器件老化等带来的检测一致性问题;能够根据检测算法的输出信号,发出控制指令进行指针校准和显示交互。
27、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:1.一种适用于智能手表的表圈旋转自动检测装置,其特征在于,包括旋转表圈、旋转检测模块、磁铁、固定中框和混合智能机芯模块,其中旋转表圈底部开设有用于容纳磁铁的凹槽,旋转检测模块设置在固定中框的侧壁上,并通过软排线与混合智能机芯模块连接,混合智能机芯模块固定连接在固定中框上;
2.根据权利要求1所述的适用于智能手表的表圈旋转自动检测装置,其特征在于,所述旋转检测模块和混合智能机芯模块通过iic或spi接口进行数据通信。
3.根据权利要求1所述的适用于智能手表的表圈旋转自动检测装置,其特征在于,所述旋转表圈通过八爪弓线卡入固定中框,并与固定中框旋转连接。
4.根据权利要求3所述的适用于智能手表的表圈旋转自动检测装置,其特征在于,所述旋转表圈内环侧壁均匀间隔45度设有八个安装槽,每一个安装槽中设有一磁铁,并将每个磁铁分别进行标号为n1、s1、n2、s2、n3、s3、n4和s4,其中间隔排列的n1、n2、n3和n4为n极极性朝下,s1、s2、s3和s4为s极极性朝下。
5.根据权利要求4所述的适用于智能手表的表圈旋转自动检测装置,其特征在于,每个磁铁的磁力大小排列方式为n1=s1>n2=s2>n3=s3>n4=s4。
6.一种适用于智能手表的表圈旋转自动检测方法,其特征在于,所述检测方法如权利要求1-5中任一所述的适用于智能手表的表圈旋转自动检测装置进行检测,所述检测方法包括:
7.根据权利要求6所述的适用于智能手表的表圈旋转自动检测方法,其特征在于,所述采集旋转检测模块中原始磁场数据,其中包括x-y-z三轴磁场数据(gx(t)、gy(t)、gz(t)),其中x轴磁场数据gx(t)基于x轴旋转角度呈现正弦变化趋势,y轴磁场数据gy(t)基于y轴旋转角度呈现余弦变化趋势,计算公式如下:
8.根据权利要求7所述的适用于智能手表的表圈旋转自动检测方法,其特征在于,所述旋转角度的计算过程如下:
9.根据权利要求7所述的适用于智能手表的表圈旋转自动检测方法,其特征在于,所述通过自适应模版匹配方法,计算得出旋转表圈相对固定中框的停留位置数据,其中包括:
10.根据权利要求6所述的适用于智能手表的表圈旋转自动检测方法,其特征在于,所述根据按压检测算法对原始磁场数据中的有关于z轴的数据进行识别处理,得到旋转表圈的按压信号,其中包括:
技术总结本发明提供了一种适用于智能手表的表圈旋转自动检测装置及方法,涉及智能手表的表圈旋转自动检测技术领域,包括旋转表圈、旋转检测模块、磁铁、固定中框和混合智能机芯模块,采集旋转检测模块中原始磁场数据,得到旋转表圈相对于固定中框的旋转角度和旋转方向;利用位置检测算法对关于X轴和Y轴的数据进行归一化处理,计算得出旋转表圈相对固定中框的停留位置数据;得到旋转表圈的按压信号;控制混合智能机芯模块进行指针校准和屏幕交互,进而完成对智能手表的表圈旋转的检测工作。本发明的有益效果为通过两者配合,手表智能机芯能够准确检测手表表圈的旋转、按压和停留操作,通过检测信号来控制调节手表指针、菜单翻转和选中等交互需求。技术研发人员:杨志远,李喆,董涵智,史贤力,王成军受保护的技术使用者:成都天奥电子股份有限公司技术研发日:技术公布日:2024/4/7本文地址:https://www.jishuxx.com/zhuanli/20240730/153148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表