一种机动原子钟守时方法及装置
- 国知局
- 2024-07-30 10:33:19
本发明涉及原子钟,尤其涉及一种原子钟守时方法及装置。
背景技术:
1、守时系统是实时输出稳定可靠的时间频率信号的装置。随着时间频率信号的广泛应用,车载守时系统或者舰船等位置移动守时系统成为位置固定守时系统的备份和补充,为用户提供更快捷有效的时间频率信号。
2、目前已有的原子钟守时方法是一种适用于位置固定的精密实验室环境的守时系统产生的原子钟守时方法,车载或舰船等位置移动守时系统与常见的位置固定的守时系统不同在于多种运行状态,包括:初始运行状态、静止状态和移动状态时的不同原子钟守时方法。氢原子钟的频率稳定度受环境温度影响大,在移动状态和静止状态切换时频率稳定度变化达到一个数量级,并且从移动状态切换到静止状态后16小时内仍然不能达到静止状态时的频率稳定度,现有的技术基本都是以氢原子钟做主钟的原子钟守时方法,因此现有的原子钟守时方法不适用于机动守时系统,本发明中增加了守时系统从静止状态向移动状态切换或者从移动状态向静止状态切换时的守时方法策略,守时系统处于移动状态时选择铯原子钟为主钟,守时系统从移动状态切换为静止状态时,根据氢原子钟的性能来确定主钟,这样降低了移动过程中由于氢原子钟稳定度变差造成守时系统性能变差的可能性,因此本发明提出的守时方法更适用于机动守时系统;
3、另外,现有技术中原子时尺度算法均建立在原子钟稳定运行并且原子钟时差比对数据积累3-7天上,因此从守时系统设备接通电源到数据积累3-7天期间,守时系统无法提供稳定的时间频率信号。本发明依据铯原子钟从接通电源开始到稳定时间比氢原子钟用时短的特点,在守时系统初始运行时设计了以铯原子钟为主钟的初始运行原子时尺度计算方法,这样以来,从守时系统设备接通电源到提供稳定的时间频率信号时间约为9-12小时,大大缩短了守时系统从设备接通电源到输出稳定的时间频率信号的时间。
4、综上,现有的原子钟守时方法与装置受限于位置固定的守时系统,无法适用位置移动的守时系统;同时,现有的原子钟守时方法中守时系统从设备接通电源到输出稳定的时间频率信号时间较长,3-7天后才能提供时间频率服务。因此,亟待发明一种机动原子钟守时方法及装置。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种机动原子钟守时方法及装置,既适用于位置固定的守时系统,也适用于位置移动的守时系统的原子钟守时方法与装置,能够解决现有原子钟守时方法对于位置移动守时系统无法运行的问题,也能够解决现有原子钟守时方法造成短时间内无法提供时间频率服务的问题。
2、本发明解决其技术问题所采用的技术方案是:
3、一种机动原子钟守时方法,包括四个步骤:
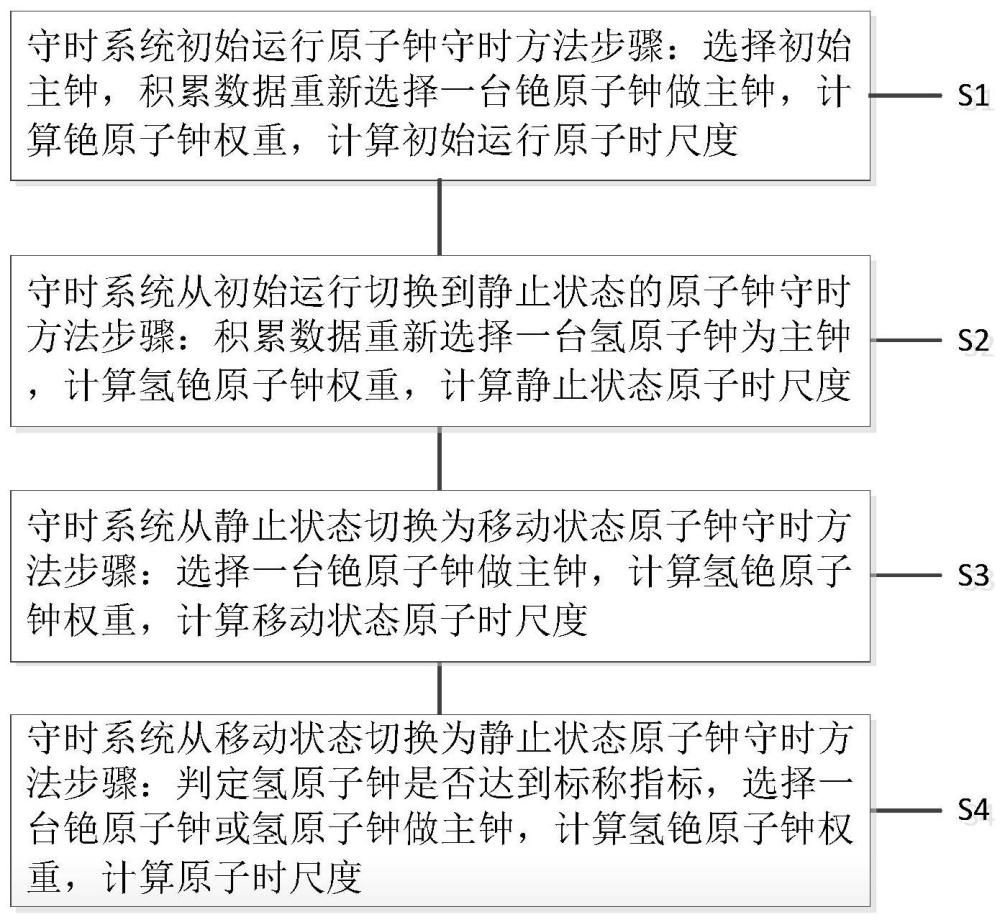
4、s1,首先利用出厂测试数据选择初始主钟,依据铯原子钟参数判定铯原子钟达到标称指标后开始积累原子钟相差比对数据,利用原子钟相差比对数据重新选择一台铯原子钟为主钟,并计算驾驭量后切换主钟,然后利用原子钟时差比对数据计算各铯原子钟权重,接着利用原子钟时差比对数据和各铯原子钟权重计算初始运行原子时尺度,并利用初始运行原子时尺度对主钟进行驾驭;守时系统初始运行原子时尺度步骤缩短了从守时系统设备接通电源到守时系统输出稳定的时间频率信号的时间;
5、s2,氢原子钟达到标称指标后,开始积累原子钟时差比对数据和原子钟相差比对数据,然后利用原子钟相差比对数据重新选择一台氢原子钟为主钟,并切换主钟,此时守时系统进入静止状态,接着利用原子钟时差比对数据计算各氢铯原子钟权重,利用原子钟时差比对数据和各氢铯原子钟权重计算静止状态原子时尺度;
6、s3,当守时系统从静止状态切换为移动状态时,利用原子钟相差比对数据选择一台铯原子钟做主钟,并切换主钟,利用原子钟时差比对数据计算各氢铯原子钟权重,接着利用原子钟时差比对数据和各氢铯原子钟权重计算移动状态原子时尺度;
7、s4,当守时系统从移动状态切换为静止状态时,首先依据氢原子钟参数判定氢原子钟是否达到标称指标,当氢原子钟达到标称指标时,利用原子钟相差比对数据选择一台氢原子钟做主钟,并切换主钟,当氢原子钟未达到标称指标时,利用原子钟相差比对数据选择一台铯原子钟做主钟,并切换主钟,利用原子钟时差比对数据计算各氢铯原子钟权重,接着利用原子钟时差比对数据和各氢铯原子钟权重计算原子时尺度。
8、进一步的,步骤s1中选择初始主钟,是利用依据铯原子钟出厂测试的稳定度数据,选择指定时间间隔的稳定度值最小的铯原子钟为初始主钟。
9、进一步的,步骤s1和步骤s2中重新选择一台原子钟为主钟,并切换主钟,是利用原子钟相差比对数据计算各原子钟的稳定度,选择指定时间间隔的稳定度最小的原子钟为主钟,重新计算驾驭量,切换主钟。
10、进一步的,步骤s1中计算各铯原子钟权重的步骤为:
11、在i-1时刻对设定长度的原子钟时差比对数据进行二次项或一次项拟合,得到原子钟的预报频漂和预报速率,接着根据预报频漂和预报速率计算得到i时刻原子钟时差比对预报值,然后从i时刻原子钟时差比对数据中扣除所述原子钟时差比对预报数据,利用第一公式计算得到各原子钟标准偏差,其中,σ(i,j)表示i时刻第j台原子钟的标准偏差,xij表示i时刻第j台原子钟时差比对数据,xij′表示i时刻的第j台原子钟时差比对预报值,n表示选取的第j台原子钟时差比对数据长度;
12、最后利用第二公式计算得到各原子钟权重,并利用对原子钟权重的最大值进行限制,其中,w1(i,j)表示i时刻第j台原子钟在守时系统初始运行时的权重,m表示参与计算权重的原子钟数量,σ(i,j)表示所述i时刻第j台原子钟的标准偏差。
13、进一步的,步骤s2、步骤s3和步骤s4中计算原子钟权重的步骤为:
14、在i-1时刻对设定长度的原子钟时差比对数据x扣除原子时尺度ta后得到ta-x,然后对ta-x进行一次项拟合,得到i-1时刻原子钟的预报速率v(i-1,j)′,接着在i时刻对所述设定长度的原子钟时差比对数据扣除原子时尺度并进行一次项拟合,得到i时刻原子钟的预报速率v(i,j)′,然后计算速率变化量δv(i,j)=v(i,j)′-v(i-1,j)′,最后利用公式计算得到各原子钟权重,并利用对原子钟权重的最大值进行限制,其中,w2(i,j)表示i时刻第j台原子钟在静止状态时的权重,m表示参与计算权重的原子钟数量,δv(i,j)表示所述i时刻第j台原子钟的速率变化量;
15、原子钟权重计算方法旨在为预测性较好的原子钟取较大的权,预测性较差的原子钟取较小的权,让“好”的原子钟在原子时尺度计算中发挥更好的作用,保证了原子时尺度的准确性和稳定性。
16、进一步的,步骤s1,s2,s3,s4中计算原子时尺度的步骤为:
17、利用第三公式计算原子时尺度,其中,ta(i)表示i时刻原子时尺度,xij表示i时刻第j台原子钟时差比对数据,xij′表示i时刻的第j台原子钟时差比对预报值,w(i,j)表示i时刻第j台原子钟的权重,m表示参与原子时尺度计算的原子钟数量。
18、进一步的,步骤s1,s2,s3,s4中计算驾驭量的步骤为:
19、根据第四公式计算驾驭量对主钟进行驾驭,当原子时尺度ta(i)还未生成之前,计算驾驭量时使用第五公式其中,s(i,j)表示i时刻第j台原子钟作为主钟的驾驭量,v(i,j)′表示主钟预报速率,τ表示原子钟时差数据的最小时间间隔,ta(i)表示i时刻的原子时尺度,xij表示i时刻第j台原子钟时差比对数据,f表示主钟驾驭频度。
20、本发明还提供一种机动原子钟守时装置,包括氢铯原子钟组、无损切换器、相位微调器、多通道比相仪,多通道计数器和控制计算机。
21、所述的氢铯原子钟组输出的10mhz频率信号接入无损切换器,氢铯原子钟组产生10mhz频率信号和1pps脉冲信号,无损切换器完成主钟切换,各氢铯原子钟中某一台原子钟被选为主钟后,无损切换器无缝输出当前主钟的10mhz频率信号,即完成了旧主钟到新主钟的无缝切换;
22、所述的无损切换器输出的10mhz频率信号接入相位微调器,相位微调器实现主钟驾驭,相位微调器接收到所述驾驭量后,通过频率调整或相位调整实现主钟驾驭;
23、所述的相位微调器输出的10mhz信号接入多通道比相仪的参考通道,所述氢铯原子钟组输出的10mhz频率信号接入多通道比相仪除参考通道外其他通道,产生各原子钟10mhz频率信号相对于驾驭后的主钟10mhz频率信号的相差比对数据,为优选主钟时提供数据;所述相位微调器输出的1pps脉冲信号接入所述多通道计数器的参考通道,所述氢铯原子钟组输出的1pps脉冲信号接入所述多通道计数器除参考通道外其他通道,用来产生各原子钟1pps脉冲信号相对于驾驭后的主钟1pps脉冲信号的时差比对数据,为原子时尺度计算提供数据。
24、本发明的有益效果在于:
25、1)与现有技术相比较,本发明中增加了守时系统从静止状态向移动状态切换或者从移动状态向静止状态切换时的守时方法策略,如步骤s3和s4所述,守时系统处于移动状态时选择铯原子钟为主钟,守时系统从移动状态切换为静止状态时,根据氢原子钟的性能来确定主钟,这样做是基于氢原子钟的频率稳定度受环境温度影响大,如文献[1](翟造成,氢脉泽谐振腔频率-温度效应分析,宇航计测技术,2006年10月,vol26,no.5,p7-p11)所述,氢原子钟谐振腔的温度变化是影响氢原子钟输出频率稳定度的重要因素,文献[2](孙长嫔,李锡瑞,刘铁新,氢原子钟的数字温控设计,天文研究与技术,2023年3月,vol20,no.2,p165-p172)中指出国际上对氢原子钟工作环境要求小于±0.01℃;氢原子钟装载在移动介质时,温度控制能力很难达到±0.01℃,一般情况下,可控制在±0.1℃,因此氢原子钟稳定度会变差;文献[3](李帅辰,武建锋,崔海波,方婧,国产氢原子钟移动守时性能测试与分析[j/ol],导航定位学报,2022年10月)中利用实验数据得到结论:氢原子钟在移动过程中频率稳定度变差了1个数量级,从移动状态切换到静止状态后16小时内氢原子钟的频率稳定度介于静止状态和移动状态之间的频率稳定度,并且频率稳定度波动很大,因此采用本发明的所述的守时方法,降低了移动过程中由于氢原子钟稳定度变差造成守时系统性能变差的可能性;与现有技术比较,本发明提出的守时方法适用于机动守时系统,解决了现有原子钟守时方法不适用于机动守时系统的问题;
26、2)本发明增加了守时系统初始运行时以铯原子钟为主钟的初始运行原子时尺度计算方法。现有技术中,原子时尺度算法均建立在原子钟稳定运行并且原子钟时差比对数据积累3-7天上,因此从守时系统设备接通电源到数据积累3-7天期间,守时系统无法提供稳定的时间频率信号。本发明依据铯原子钟从接通电源开始到稳定时间比氢原子钟用时短的特点,铯原子钟从接通电源到稳定输出信号时间为4-5小时,氢原子钟相应时间为12-72小时,因此首先选择铯原子钟做主钟,接着利用5-7小时的原子钟时差比对数据预报主钟速率并进行驾驭,从而输出稳定的时间频率信号,这样守时系统从设备接通电源到输出稳定的时间频率信号时间为9-12小时,与现有技术相应时间3-7天,缩短了27-156小时。
本文地址:https://www.jishuxx.com/zhuanli/20240730/153389.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表