一种超声速近地双体分离风洞试验系统及方法与流程
- 国知局
- 2024-07-30 10:53:22
本发明涉及风洞试验装备,尤其涉及一种超声速近地双体分离风洞试验系统及方法。
背景技术:
1、电磁助推发射水平起降空天飞行器是近年研究热点,典型发射过程为助推器携带飞行器加速至超声速后,助推器与飞行器完成近地双体分离,飞行器随后自主入轨。该发射方式有助于解决空天飞行器低速起飞阶段中升力不足、推阻匹配难及燃料消耗大等方面问题。
2、在发射过程中,飞行器受地面效应以及助推器干扰,流动特征极为复杂,难以通过理论计算或数值模拟进行分析,有必要通过风洞试验预示飞行器-助推器近地双体分离过程中的气动及流场特性。
3、目前,现有超声速地面效应及双体分离模拟方面的试验具有以下特点及问题:
4、1、在超声速地面效应方面主要包括固定地板、移动地板两类方法。两类方法的试验装置多用于低速地面效应相关试验,包括飞机水平起降、垂直起降等领域。固定地板存在包括边界层厚度、前缘激波在内的流场干扰;移动地板存在速度上限较低,振动难以消除的问题。因此,低速地面效应相关试验装置及方法无法直接应用于在风洞中建立超声速地面效应。
5、2、在双体分离模拟方面主要包括自由飞、捕获轨迹两类方法。自由飞方法需严格满足几何相似、质量相似、动力相似等相似准则,以此为前提才能正确再现飞行器双体联动分离过程。由于模型加工的客观困难,上述相似准则只能部分满足。双体捕获轨迹方法适用于开域内飞行器分离轨迹模拟,如需进一步在风洞试验中布放建立地面效应的装置,则会对原有试验机构造成干涉。
6、因此,现有风洞试验方法只能部分模拟低速地面效应或双体分离,难以满足超声速近地双体分离模拟需求。
技术实现思路
1、本发明提供了一种超声速近地双体分离风洞试验系统及方法,能够解决现有技术难以满足超声速近地双体分离模拟需求的技术问题。
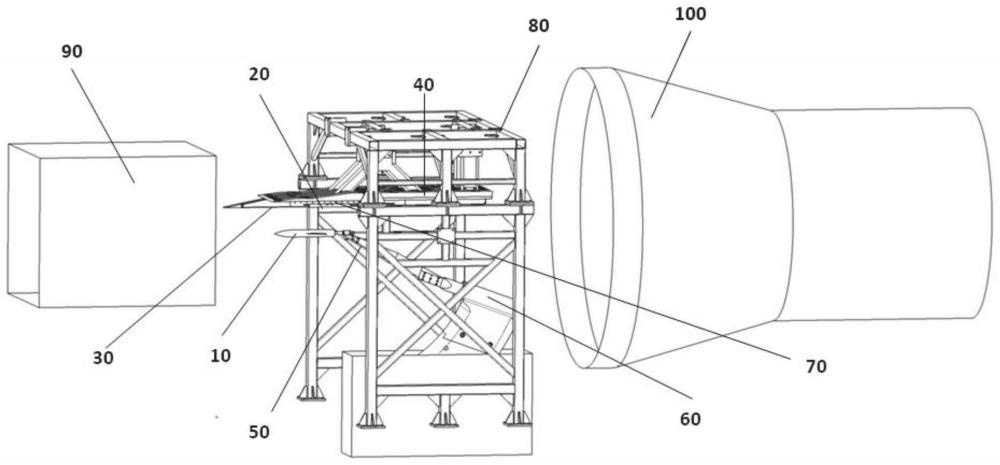
2、根据本发明的一方面,提供了一种超声速近地双体分离风洞试验系统,所述系统包括飞行器模型、助推器模型、轨道模型、地效试验台、飞行器模型支撑部、飞行器模型三自由度运动机构、助推器模型直线运动机构和地效试验台支撑部;
3、所述地效试验台支撑部设置于风洞喷口及风洞收集器之间,且与开口风洞试验段相连,所述地效试验台支撑部用于支撑所述地效试验台;
4、所述地效试验台倒置安装于所述地效试验台支撑部上;
5、所述轨道模型倒置安装于所述地效试验台的下方,所述轨道模型的中段具有空腔,所述空腔某一侧沿纵向设有敞口段;
6、所述助推器模型直线运动机构倒置安装于所述空腔内,且与所述轨道模型相连;
7、所述助推器模型的一侧从所述敞口段伸入所述空腔并倒置安装于所述助推器模型直线运动机构上,且在所述助推器模型直线运动机构的驱动下沿纵向进行直线运动;
8、所述飞行器模型设置于所述助推器模型的下方,通过所述飞行器模型支撑部与所述飞行器模型三自由度运动机构相连,所述飞行器模型在所述飞行器模型三自由度运动机构的驱动下进行三自由度运动;
9、所述飞行器模型三自由度运动机构固定于风洞试验段内。
10、优选的,所述飞行器模型的模型缩比根据风洞射流菱形区、所述飞行器模型与所述地效试验台以及所述轨道模型的相对位置、风洞喷口特征高度和风洞阻塞比确定。
11、优选的,所述飞行器模型在满足下述约束条件方程组的情况下,获取所述飞行器模型的模型缩比的取值范围:
12、r=lm/lf
13、(h-hmax-h1)cotθ1-(lm+l0)>0.2lm
14、l0>l1+(hmax-(h2-h1))cotθ2
15、l0>l2+hmaxcotθ3
16、σ=sm/h2<σmax
17、θ1=90-1/arcsin(ma)
18、θ2=θ3=1/arcsin(ma)
19、式中,r为飞行器模型的模型缩比,hmax为飞行器模型纵轴到地面试验台正面的最大垂向距离,h1为地效试验台正面到风洞喷口上沿延长线的垂向距离,h2为轨道模型顶面到风洞喷口上沿延长线的垂向距离,h为风洞喷口的高度,θ1为欠膨胀超声速喷菱形区半顶角,θ2、θ3分别为轨道模型顶面前缘激波角、地效试验台前缘激波角,l0、l1、l2分别为飞行器模型尖点、轨道模型尖点、地效试验台尖点到风洞喷口端面的纵向距离,lm、lf、sm分别为飞行器模型长度、飞行器实际长度、飞行器模型参考面积,ma为所模拟的来流马赫数,σ为风洞阻塞比,σmax为安装超声速近地双体分离风洞试验系统后风洞允许最大阻塞比;其中,垂向为重力方向,纵向为风洞轴线方向。
20、优选的,所述飞行器模型的模型缩比为所述飞行器模型的模型缩比的取值范围中的最大值。
21、优选的,所述地效试验台尾端面到风洞喷口端面的纵向距离l3不小于2h。
22、优选的,所述飞行器模型尾端面到所述地效试验台尾端面的纵向距离l4不小于3lm。
23、优选的,所述地效试验台宽度w不小于2倍的飞行器模型展长b。
24、优选的,所述地效试验台支撑部包括垂向支撑组件、横向支撑组件、y字型吊臂和i字型吊臂,所述横向支撑组件设置于所述垂向支撑组件的上侧,所述y字型吊臂和所述i字型吊臂倒置安装于所述横向支撑组件上,所述y字型吊臂和所述i字型吊臂用于连接所述地效试验台,所述y字型吊臂和所述i字型吊臂的垂向高度均不小于h1。
25、根据本发明的另一方面,提供了一种超声速近地双体分离风洞试验方法,所述方法采用上述任一所述系统进行试验,所述方法包括:
26、s10、将所述系统放置于风洞喷口及风洞收集器之间,进行风洞试验;
27、s20、启动风洞,建立流场;
28、s30、判断飞行器模型和助推器模型是否双体联动,若是,转至s40,否则,转至s50;
29、s40、令助推器模型纵向运动到位;
30、s50、令飞行器模型垂向和攻角运动到位;
31、s60、在流场稳定的情况下,采集通过风洞试验得到的飞行器超声速自由来流下气动特性、通过风洞试验得到的飞行器超声速近轨与自由来流下气动特性的差值、通过风洞试验得到的飞行器超声速近地双体分离与近轨气动特性的差值;
32、s70、基于通过风洞试验得到的飞行器超声速自由来流下气动特性、通过风洞试验得到的飞行器超声速近轨与自由来流下气动特性的差值、通过风洞试验得到的飞行器超声速近地双体分离与近轨气动特性的差值和通过数值模拟得到的地效试验台与实际地面在形成超声速地面效应时差异的修正值获取经修正的飞行器双体分离过程飞行器气动特性;
33、s80、判断风洞试验是否结束,若是,系统状态复位,否则,转至s30。
34、优选的,在进行风洞试验之前,所述方法还包括:
35、输入当前工况,并进行模拟飞行,其中,所述工况包括来流条件、飞行器模型垂向位置及攻角、助推器模型纵向位置;
36、在模拟飞行状态正常的情况下,进行系统状态复位,在模拟飞行状态异常的情况下,重新输入当前工况。
37、优选的,通过下式获取经修正的飞行器双体分离过程飞行器气动特性:
38、
39、其中,
40、
41、
42、式中,为经修正的飞行器双体分离过程飞行器气动特性,为通过风洞试验得到的飞行器超声速自由来流下气动特性,为通过风洞试验得到的飞行器超声速近轨与自由来流下气动特性的差值,为通过数值模拟得到的地效试验台与实际地面在形成超声速地面效应时差异的修正值,为通过风洞试验得到的飞行器超声速近地双体分离与近轨气动特性的差值,为通过风洞试验得到的飞行器超声速近轨气动特性,为通过数值模拟得到的实际地面条件下飞行器超声速近轨气动特性,为通过数值模拟得到的地效试验台条件下飞行器超声速近轨气动特性,为通过风洞试验得到的飞行器双体分离过程飞行器气动特性的试验值。
43、优选的,所述方法还包括:在风洞试验过程中,实时对地效试验台进行振动监测,在振动正常的情况下,继续进行风洞试验;在振动异常的情况下,直接结束风洞试验。
44、应用本发明的技术方案,将该超声速近地双体分离风洞试验系统设置于风洞试验段内,可在风洞中建立超声速地面效应,实现超声速近地双体分离,并得到飞行器分离过程中的气动特性。本发明可满足航天电磁助推发射过程分离特性研究需求。
45、本发明与现有技术相比,具有如下有益效果:
46、1、该试验系统具有流场干扰小、适用速域宽的特点,能在风洞中实现按预定飞行器离地高度、飞行攻角及飞行器与助推器相对位置开展飞行器气动特性测量,解决目前无法开展此类型试验的现状;
47、2、该试验方法能对试验过程中风洞喷口自由射流欠膨胀、激波及边界层等因素引起的测量数据系统性偏差进行修正,从而获得更为真实的气动特性演化规律。
本文地址:https://www.jishuxx.com/zhuanli/20240730/154776.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。