一种航行器组合导航地面验证系统及方法与流程
- 国知局
- 2024-07-30 11:07:34
本发明涉及导航精度验证,尤其涉及一种航行器组合导航地面验证系统及方法。
背景技术:
1、随着航天、航空和航海等领域的高速发展,对于导航精度的要求越来越高。其中,对于可重复运载火箭在返回着陆过程中,为避免速度位置误差过大而导致的硬着陆,需要对速度位置误差进行严格控制,这对导航系统的精度提出了很高的要求。传统的惯性导航不受外界环境影响,但导航误差随时间积累,而gnss导航定位精度高,其定位误差不随时间发散,但容易受到外界环境影响,因此以gnss/惯组组合导航方式是现阶段的主流导航手段。
2、目前,在实际飞行试验过程中,运载火箭返回着陆段处于动态条件下,无法直接对组合导航精度进行验证,因此无法判断运载火箭返回段组合导航系统是否满足所需高精度导航的问题。
3、因此,亟需一种航行器组合导航地面验证系统及方法来解决上述问题。
技术实现思路
1、基于以上所述,本发明的目的在于提供一种航行器组合导航地面验证系统及方法,克服了现有条件下组合导航系统精度无法得到验证的缺陷,试验成本较低,验证准确性较高。
2、为达上述目的,本发明采用以下技术方案:
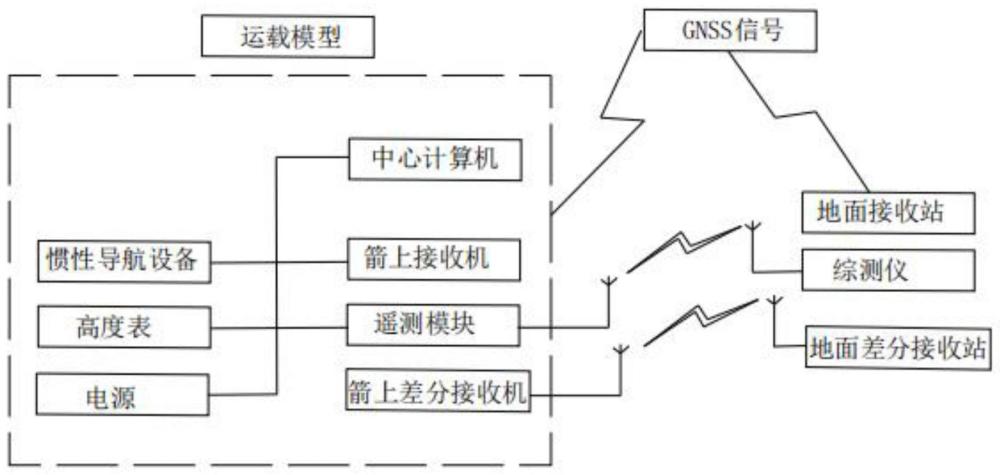
3、一种航行器组合导航地面验证系统,包括包括运载模型、精度校核用差分gnss、惯性导航设备、gnss和中心计算机;
4、所述运载模型用于模拟航行器的工况;
5、所述精度校核用差分gnss包括地面差分接收机和箭上差分接收机,所述地面差分接收机用于接收卫星数据,并处理成差分数据,所述箭上差分接收机装载在所述运载模型上,用于接收卫星数据,并根据所述卫星数据和所述差分数据进行导航计算得到校核用定位信息;
6、所述惯性导航设备装载在所述运载模型上,用于获取所述运载模型的第一信息;
7、所述gnss包括地面接收机和箭上接收机,所述箭上接收机装载在所述运载模型上;所述地面接收机用于接收卫星数据,并处理后发送给所述箭上接收机,所述箭上接收机进行导航计算得到第二信息;
8、所述中心计算机装载在所述运载模型上,所述惯性导航设备和所述箭上接收机均通过总线与所述中心计算机连接,所述中心计算机根据所述第一信息和所述第二信息进行组合导航计算,得到待校核用定位信息。
9、作为一种航行器组合导航地面验证系统的优选方案,还包括高度表,所述高度表装载在所述运载模型上,并与所述中心计算机通过总线连接,所述高度表用于测量得到第三信息,所述中心计算机根据所述第一信息和所述第三信息进行组合导航计算,得到所述待校核用定位信息。
10、作为一种航行器组合导航地面验证系统的优选方案,还包括遥测模块,所述遥测模块包括地面程控天线和箭上地基天线,所述箭上地基天线装载在所述运载模型上,所述地面程控天线用于将所述地面接收机处理后的数据通过上行链路传递给所述箭上地基天线,所述箭上地基天线将所述地面接收机处理后的数据传输给所述箭上接收机。
11、作为一种航行器组合导航地面验证系统的优选方案,所述运载模型的重量和外形分别与预设航行器的重量和外形相同。
12、一种航行器组合导航地面验证系统方法,基于上述任一技术方案所述的航行器组合导航地面验证系统,所述验证方法包括:
13、将所述地面差分接收机和所述地面接收机按预设位置布置在地面上,将所述箭上差分接收机、所述惯性导航设备、所述箭上接收机和所述中心计算机按预设坐标安装在所述运载模型上;
14、所述运载模型模拟航行器的工况;
15、所述惯性导航设备测量所述运载模型在导航坐标系下的所述第一信息,所述箭上接收机获取在地心坐标下的所述第二信息;
16、所述中心计算机采集所述第一信息和所述第二信息,并根据采集的所述第一信息和所述第二信息进行组合导航计算得到所述待校核用定位信息;
17、所述地面差分接收机接收卫星数据,并处理成差分数据,所述箭上差分接收机接收卫星数据并根据所述卫星数据和所述差分数据计算得到所述校核用定位信息;
18、比较所述待校核用定位信息和所述校核用定位信息。
19、作为一种航行器组合导航地面验证方法的优选方案,所述中心计算机在进行组合导航计算前还包括:
20、所述中心计算机将采集到的所述运载模型在导航坐标系下的所述第一信息转换至所述运载模型在发射系坐标下的第一转换信息;
21、所述中心计算机将采集到的所述箭上接收机在地心坐标系下的所述第二信息转换至所述箭上接收机在发射坐标系下的第二转换信息。
22、作为一种航行器组合导航地面验证方法的优选方案,所述中心计算机在进行组合导航计算前还包括:
23、所述中心计算机将所述运载模型在发射系坐标下的所述第一转换信息通过杆臂补偿转换至在发射坐标系下惯性导航设备处的第一补偿信息;
24、所述中心计算机将所述箭上接收机在发射坐标系下的所述第二转换信息通过杆臂补偿转换至在发射坐标系下惯性导航设备处的第二补偿信息;
25、所述中心计算机根据所述第一补偿信息和所述第二补偿信息进行组合导航计算得到所述待校核用定位信息;
26、所述箭上差分接收机在进行导航计算前还包括:
27、将所述箭上差分接收机在地心坐标系下的测量定位信息经过坐标转换至所述箭上差分接收机在发射坐标下的转换测量定位信息,然后通过杆臂补偿转换至在发射坐标系下惯性导航设备处的所述校核用定位信息。
28、作为一种航行器组合导航地面验证方法的优选方案,所述中心计算机采集到的所述第一信息和所述第二信息均具有utc时间和中心计算机时间,所述中心计算机在进行组合导航计算前还包括:
29、所述中心计算机将所述第一信息的utc时间与中心计算机时间同步,并将所述第二信息的utc时间与中心计算机时间同步。
30、作为一种航行器组合导航地面验证方法的优选方案,在比较所述待校核用定位信息和所述校核用定位信息时还包括:
31、将所述箭上差分接收机输出的所述校核用定位信息的utc时间与所述箭上接收机的所述第二信息的utc时间同步,然后将其与所述第一信息和所述第二信息同步后具有的中心计算机时间进行同步;
32、比较同一时刻下的所述待校核用定位信息和所述校核用定位信息。
33、作为一种航行器组合导航地面验证方法的优选方案,所述验证系统还包括高度表,所述验证方法还包括:
34、将高度表按预设坐标安装在所述运载模型上作为所述gnss的冗余,所述高度表测量得到第三信息;
35、若所述gnss失效,所述中心计算机根据所述第三信息和所述第一信息进行组合导航计算得到所述待校核用定位信息。
36、本发明的有益效果为:
37、本发明提供一种航行器组合导航地面验证系统,该一种航行器组合导航地面验证系统包括运载模型、精度校核用差分gnss、惯性导航设备、gnss和中心计算机,通过惯性导航设备、gnss和中心计算机组成组合导航系统,并由运载模型装载,试验时进行导航测量得到待校核用定位信息;同时通过精度校核用差分gnss得到导航定位较为精确的校核用定位信息,将待校核用定位信息与校核用定位信息进行比较即可分析组合导航的测量精度,克服了现有条件下组合导航系统精度无法得到验证的缺陷,且试验系统简单可靠,成本较低,同时适用范围较广,能应用于航天、航空和航海等领域。
38、本发明还提供一种航行器组合导航地面验证方法,基于上述的航行器组合导航地面验证系统,通过将待校核用定位信息与校核用定位信息进行比较即可分析组合导航的测量精度,克服了现有条件下组合导航系统精度无法得到验证的缺陷,且试验方法简单易行。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155533.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。