一种基于天气雷达参数的有效三维空域生成方法与流程
- 国知局
- 2024-07-30 11:14:09
本发明涉及雷达,尤其涉及一种基于天气雷达参数的有效三维空域生成方法。
背景技术:
1、在气象监测和预警领域,天气雷达作为一种重要的遥感探测工具,对于监测云、降雨、强对流天气等具有不可替代的作用,而站网布局则是确保雷达数据全面覆盖和准确探测的基础。传统的天气雷达站网布局多基于地形等高平面遮蔽图,但这种方法无法全面反映雷达波束在三维空间中的传播特性,以及地形、建筑物等障碍物对雷达波束的遮挡情况。因此,如何解决传统雷达站网布局规划中平面遮蔽图无法准确反映雷达波束在三维空间中的传播特性和地形遮挡影响的问题是目前需要考虑的。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供了一种基于天气雷达参数的有效三维空域生成方法,解决了传统雷达站网布局规划中存在的问题。
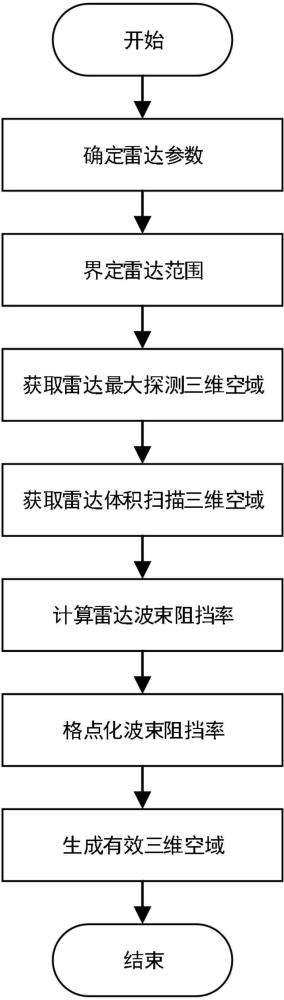
2、本发明的目的通过以下技术方案来实现:一种基于天气雷达参数的有效三维空域生成方法,所述生成方法包括:
3、步骤一、确定雷达参数,并根据雷达参数确定雷达的理论探测范围;
4、步骤二、根据雷达的位置和探测范围,构建一个雷达最大三维探测空域,并将雷达最大三维探测空域划分为若干个小格点;
5、步骤三、根据雷达扫描以及波束传播特性获取雷达体积扫描三维空域,并计算每个格点上的雷达波束阻挡率;
6、步骤四、通过坐标变换将波束阻挡率格点化到雷达三维探测空域格点中,在每个格点上根据雷达波束阻挡率的计算结果,评估该格点是否属于有效探测区域;
7、步骤五、将所有属于有效探测区域的格点进行组合,形成一个考虑遮挡的三维格点构成的有效三维空域。
8、所述步骤一具体包括以下内容:
9、a21、将地球近似为一个球体,通过表示因为纬度不断变化的修正球半径长度,表示任意纬度glat所在的纬度圈半径,ea表示赤道半径,eb表示极半径;
10、a22、已知雷达站点的经纬度为(glon,glat),根据最大探测距离dis计算外接正方形的对角线距离的一半为,即外接正方形四个顶点到雷达站点的距离为maxd,方位角为θ的一顶点的经纬度为(lon2,lat2),则该顶点到雷达站点之间经度方向的长度dx=maxd×1000×sinθ,纬度方向的长度dy=maxd×1000×cosθ;
11、a23、根据弧长计算公式,得到该顶点的经度为,纬度为,l表示圆心角弧长,r表示半径,α表示圆心角度数;
12、a24、重复a22和a23步骤三次得到另外三个顶点的经纬度,根据外接正方形四个顶点的经纬度得到雷达探测经纬度范围,将四个顶点中的最小经度值和最小纬度值作为探测范围的最小经纬度为(rlon1,rlat1),四个顶点中的最大经度值和最大纬度值作为探测范围的最大经纬度为(rlon2,rlat2)。
13、所述步骤二具体包括以下内容:
14、根据雷达探测经纬范围和有效探测高度确定一个雷达最大探测三维空域,雷达最大探测空域的三维格点的基本参数为,经度范围:rlon1~rlon2,纬度范围:rlat1~rlat2,高度范围:0~20km;
15、设水平面网格分辨率为0.01°×0.01°,垂直高度分辨率500m,则经度方向格点数为x =(rlon2-rlon1)/ 0.01,纬度方向格点数为y =(rlat2-rlat1)/ 0.01,高度上格点数为z =(15-0)/ 0.5,最大探测三维空域格点的总格点数为total = x×y×z。
16、所述根据雷达扫描以及波束传播特性获取雷达体积扫描三维空域具体包括以下内容:
17、计算每个扫描仰角β的探测距离b投影到水平面的距离hordis=b×cosβ;
18、根据水平面的距离计算当前扫描仰角的经纬度范围及其对应格点位置,以及计算当前扫描仰角波束宽度在垂直方向上对应的格点位置;
19、将当前扫描仰角所在的所有水平格点上方对应的波束所在垂直格点全部标识为雷达体积扫描三维空域。
20、所述根据水平面的距离计算当前仰角的经纬度范围及其对应格点位置,以及计算当前仰角波束宽度在垂直方向上对应的格点位置包括:
21、根据雷达探测范围的经纬度:最小经纬度(rlon1,rlat1),最大经纬度(rlon2,rlat2),当前扫描仰角范围的经纬度:最小经纬度(lon1,lat1),最大经纬度(lon2,lat2),得到当前扫描仰角范围对应的格点坐标,经度方向:最大最小经度相对于雷达探测范围最小经度差值除于网格分辨率,(lon1-rlon1)/0.01到ceil((lon1-rlon2)/0.01),纬度方向:最大最小纬度相对于雷达探测范围最小纬度差值除于网格分辨率,(lat1-rlat1)/0.01到ceil((lat2-rlat2)/0.01),ceil表示向上取整函数;
22、对于每个扫描仰角的数据遍历所有径向上的所有距离库,根据雷达测高公式计算出每个距离库对应的海拔高度,h表示每个距离库对应的海拔高度,h3表示雷达馈源位置海拔高度,r1表示目标的倾斜距离,β表示雷达扫描的仰角,表示等效地球半径;
23、根据波束上下边界的高度,将同一水平距离处对应上下波束边界内的区域按照高度分辨率进行格点化。
24、所述计算每个格点上的雷达波束阻挡率包括:
25、以某波束轴为中心,沿方位角每个0.1°向左、向右扩展n=±15条,沿仰角每隔0.1°向上、向下扩展m=±15条,即将雷达波束细分为31×31个单元,得到一个31×31条射线小单元组成的波束区域;
26、根据波束阻挡率计算公式计算得到某方位、某仰角和某距离库上的雷达波束的波束阻挡率为,b(n)表示波束扩展区域第n个方位上的阻挡程度,b(n)的取值与m有关,m反映第n个方位上波束被阻挡的程度,w(|n|)表示b(n)对整个波束阻挡率的贡献权重。
27、计算波束阻挡率中的m时,一个数据位置对应多个地形数据,采用最大值作为最终地形数据值进行判断,其中,一个数据位置对应的地形数据获取方法包括:
28、根据雷达站点经纬度和当前距离库的相对方位和距离,计算当前距离库的经纬度范围;
29、根据距离库的经纬度范围,获取经纬度范围内的所有数字高程模型高程数据值;
30、利用单元内的有效数字高程模型高程数据值的最大值,和距离库内31个单元点的高度进行比较,得到m的结果。
31、所述通过坐标变换将波束阻挡率格点化到雷达三维探测空域格点中具体包括以下内容:
32、根据经纬度距离计算方式计算每个极坐标点的经纬度,根据雷达最大探测三维空域格点的边界经纬度和水平分辨率得到当前极坐标点对应的格点序号;
33、根据测高公式计算得到当前极坐标点的高度,根据雷达最大探测三维空域格点的垂直分辨率,得到当前极坐标点对应的高度层序号;
34、遍历完所有极坐标点,获得雷达最大探测三维空域格点的队友关系;
35、当多个极坐标点对应同一球坐标点时,采用最大值方式确定当前球坐标点的最终结果,形成雷达波束阻挡率三维格点数据结果。
36、所述在每个格点上根据雷达波束阻挡率的计算结果,评估该格点是否属于有效探测区域具体包括:
37、将雷达体积扫描空域和波束阻挡率结果进行对比判断,如果雷达体积扫描空域对应点的值不为0,且波束阻挡率三维格点对应位置的值大于阈值,则认为当前雷达扫描三维格点被遮挡,标识为无效,否则认为当前雷达扫描三维格点不会被遮挡,标识为有效。
38、本发明具有以下优点:一种基于天气雷达参数的有效三维空域生成方法,能够全面且精确地反映雷达波束在三维空间中的传播特性,考虑到地形起伏、建筑物等障碍物对雷达波束的遮挡影响,从而实现从传统的等高平面遮蔽图分析升级到三维空域分析。此外,还能基于生成的三维空域数据,优化现有雷达的扫描策略,提高雷达系统的运行效率和天气实况的探测能力。同时,该方法为多雷达组网中的三维空域覆盖率计算提供了关键数据支持,助力构建高效的气象监测网络。通过本发明的应用,能显著提升雷达对云、降雨、强对流天气等气象现象的监测能力,为气象预警预报的实时性和准确性提供更为坚实的数据保障,从而更好地保障人民群众的生命财产安全。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155916.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。