一种多频阵列探地雷达数据实时成像识别方法
- 国知局
- 2024-07-30 11:21:12
本发明属于雷达探测,特别涉及该领域中的一种多频阵列探地雷达数据实时成像识别方法。
背景技术:
1、探地雷达(ground penetrating radar简称gpr)又称地质雷达,是一种利用高频无线电波来探测地下埋藏物结构和特征的一种地球物理雷达。探地雷达通过目标与周边介质存在电性差异来进行探测,当遇到存在电性差异的地下介质时,电磁波会发生反射,反射回上方的电磁波被接收天线所接收,地下介质介电常数差异导致电磁波在其内部传播过程中出现振幅与相位的变化,通过对接收的雷达回波信号进行分析处理,分析其特征,可以得到地下或路面各层的厚度、孤立体大小、缺陷分布等信息。传统的单天线探地雷达使用单一频率的电磁波信号,通过单一的发射和接收天线进行地下勘探,如常见的400mhz或200mhz单天线。然而单天线最大的弊端是探测深度和探测分辨率之间的矛盾:即频率低的天线探测深,但不能发现浅层的小目标;频率高的天线能发现浅层小目标,但探测深度较浅。为了克服这些缺陷,也为了提高探测效率,通常采用一个雷达主机控制多个不同频率范围的探地雷达天线阵列对整个区域进行探测,以获得更多的地下信息,进一步提升成像分辨率和准确性。
2、专利“一种探地雷达的多通道数据实时融合方法”(cn104569947b)公开了一种方法:先将各个通道数据进行带通滤波;确定时间零点,对各通道数据重新排列,对齐;确定坐标系原点,对各通道观测数据坐标转换;计算各通道数据的信息熵;采用加权平均的融合规则进行融合估计。该发明针对不同频率的单天线,不适合阵列雷达数据,且信息熵的计算是根据雷达图像中目标来判断的,计算量较大。
3、专利“一种用于多频多通道探地雷达的数据融合方法”(cn 104793203 b)公开了一种方法:将多频多个通道的原始数据经过预处理后进行时频分析,得到时频域多个通道的雷达信号,再将不同通道对应的雷达信号在时频域进行合成,即可在每个扫描道位置上获得由不同通道合成的一道时频域雷达数据,再对时频域雷达数据进行逆时频变换,即可得时间域的多频融合雷达图像。在这个专利中多频是指多种不同频率单天线、多通道其实也是指多种单天线采集的不同通道的数据,并不涉及多频阵列探地雷达。其次探地雷达天线是超宽带天线,并不是一个单一的频点,而是一个频率范围,通过简单频域叠加很容易将有用信号淹没在噪声中,导致在时域中无法恢复高频细节信息,从而降低成像的清晰度和精度。
4、文献“探地雷达多频数据融合算法研究”同样也是将不同通道的雷达数据进行时频变换,然后再进行频率加权融合后转为时域融合信号。
5、上述几种方法都是针对多个单频率天线数据进行的融合,而且都是事后处理。此外在数据实时采集过程中,还存在以下几个问题:
6、1、数据展示受限。多频阵列探地雷达在数据采集过程中,一般只能在屏幕上显示某一个通道或某一位置切片的数据,不能查看整个探测区域的雷达检测情况。
7、2、数据量巨大。多频阵列探地雷达在采集数据的过程中会带来巨大的数据量,给数据显示和传输带来巨大的压力。
8、3、数据处理复杂。多频阵列探地雷达采集到的数据包含多个频段的原始信号。处理这些数据需要相应的算法和计算能力。在实时采集过程中,快速且有效地处理和分析数据是一个挑战。因此有时只能保存原始数据。给雷达数据的后处理增加难度。
9、4、目标无法实时识别。由于数据量巨大,数据采集和目标识别是分开的,即数据采集完成后,需要非常长的时间进行后处理,用人工来判别出地下缺陷信息,无法在采集完成后就实时给出目标识别结果。
技术实现思路
1、本发明所要解决的技术问题就是提供一种简便、高效的多频阵列探地雷达数据实时成像识别方法。
2、本发明采用如下技术方案:
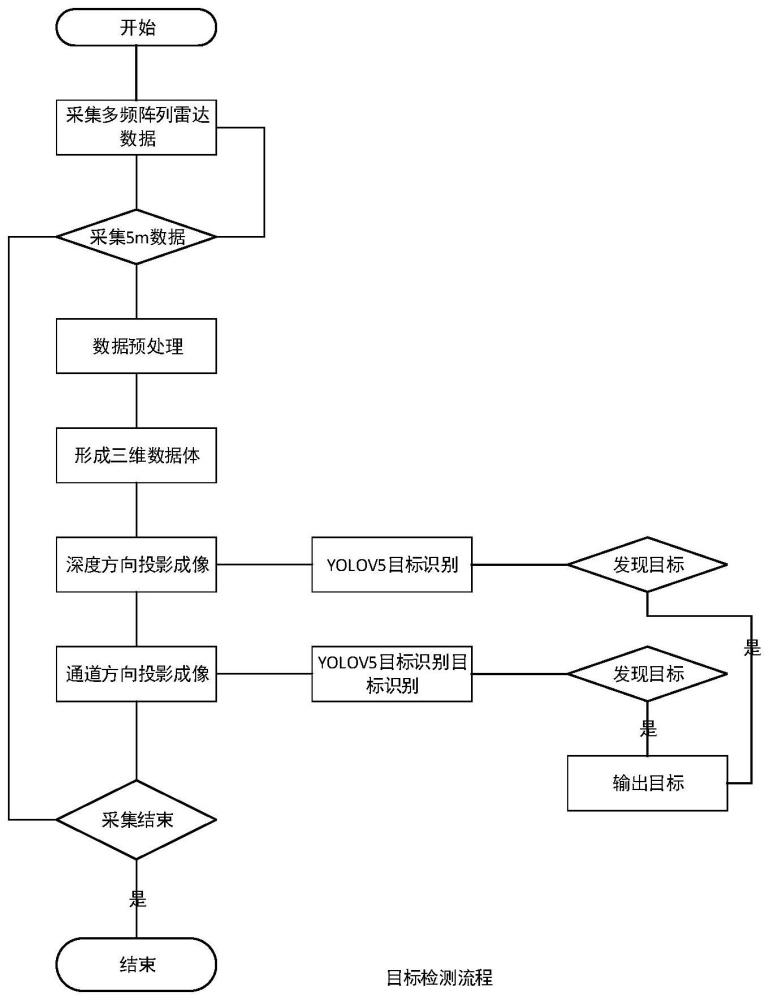
3、一种多频阵列探地雷达数据实时成像识别方法,其改进之处在于,包括如下步骤:
4、步骤1,对采集到的每个通道的探地雷达数据进行预处理,将预处理结果组合成一个三维数据体;
5、步骤2,利用光线投影及数字重建算法,从深度方向和通道方向对步骤1所得的三维数据体进行插值和投影,形成两个二维投影图像;
6、步骤3,对深度方向和通道方向的二维投影图像采用yolov5模型进行智能识别并融合判断,给出异常体的信息。
7、进一步的,所述步骤1具体包括如下步骤:
8、步骤11,实时采集一段距离的雷达数据,根据多频阵列天线的尺寸和采样间距,得到不同时间点、同一水平位置点、不同频率阵列天线采集的多频阵列探地雷达数据;该数据是由若干个频率天线,不同通道、同一水平位置的单道波形组成的二维数据;
9、步骤12,对步骤11采集的二维数据进行零偏校正,用于消除直流分量,其公式为:
10、
11、上式中,array[i][j]为某一个频率阵列天线第i道数据,第j个采样点的原始数据值,arraydewow[i][j]为某一个频率阵列天线第i道数据,第j个采样点零偏校正处理后的数据值,mwin为滑动窗的长度,mwin=采样点/时窗;
12、步骤13,对零偏校正后的数据进行背景消除,去除直达波和固定波干扰,其公式为:
13、
14、上式中,arraymov[i][j]为某一个频率阵列天线第i道数据,第j个采样点背景消除后的数据值,wmov为前进方向的滑动窗;
15、步骤14,对背景消除后的数据进行增益,凸显目标,其公式为:
16、arraysec[i][j]=arraymov[i][j]*p[j]
17、p[j]=max(1.3j*0.01,25)
18、上式中,arraysec[i][j]为经过增益放大后的数据,p[j]是每道的增益系数;
19、步骤15,连续采集固定长度三个以上位置点的数据,根据不同天线频率的时窗和时间间隔形成一个三维数据体arraycube,其公式为:
20、arraycube=[arraysec水平位置1,arraysec水平位置2,…,arraysec水平位置n]。
21、进一步的,所述步骤2具体包括如下步骤:
22、步骤21,利用光线投影穿过三维数据体;
23、步骤22,对光线上的数据进行着色,得到颜色值和透明度;
24、步骤23,将光线上的数据合成一个数据点;
25、沿光线上各个采样点的颜色合成操作公式为:
26、
27、上式中,c为最终合成颜色,n为深度方向和通道方向上的数据点数,ci为采样点i沿入射光线的颜色值,αi为采样点i沿入射光线的不透明度;
28、由上式得从前到后的合成递归方程:
29、
30、上式中,c′i为由第一个数据点到第i个数据点由透明度加权累计的颜色值,α′i为所对应的累计不透明度,c′1=0,α′1=0;
31、步骤24,重复上述步骤,直到深度方向和通道方向上的数据全部投影完毕。
32、进一步的,所述步骤3具体包括如下步骤:
33、步骤31,对深度方向和通道方向的投影图像进行基于yolov5神经网络的异常体目标识别,给出异常体目标位置;
34、步骤32,将同一异常体目标深度方向和通道方向的投影图像分别作为两个不同类别进行多目标识别,利用yolov5目标检测算法,对训练异常体目标在深度方向和通道方向的投影图像数据集进行训练和验证,获取两个方向目标识别的yolov5模型;
35、步骤33,利用训练后的yolov5模型实时检测多频阵列探地雷达深度方向和通道方向的异常体目标位置,通过保留深度方向和通道方向都存在的异常体目标位置,来剔除虚假目标,实时给出地下异常体的大小。
36、本发明的有益效果是:
37、本发明所公开的方法,不仅可以避免一次显示并存储所有通道的数据,而且还有效地保留了地下异常体的基本信息,采用深度方向和通道方向两个方向的投影图像,能更全面地展示地下异常体的信息。最后利用深度学习网络模型更快更准确地识别地下异常体。进而达到快速、高精度显示并识别探地雷达目标的技术效果,彻底改变了现有阵列数据先采集后处理的方式,解决了现有探地雷达数据量巨大且不能在探测现场直接给出探测结果的问题,实现了数据采集完成就能现场给出识别结果的飞跃。
本文地址:https://www.jishuxx.com/zhuanli/20240730/156335.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表