基于多角度增量学习的动态三维成像雷达异物检测方法
- 国知局
- 2024-07-30 11:22:22
本公开涉及毫米波图像目标检测,具体涉及一种基于多角度增量学习的动态三维成像雷达异物检测方法。
背景技术:
1、目前毫米波图像目标检测的算法主要从光学领域迁移而来,与光学图像相比,毫米波图像所含信息少,背景噪声易于违禁品产生混淆。深度学习算法虽然功能强大,但是也有一定的局限性。其中最突出的是用于训练深度学习模型的数据只能在训练时可用,而实际应用时在模型训练阶段并不总是可用获得所有可用的数据,如果将新旧数据融合在一起进行训练,这会导致计算成本大幅增加,耗时耗力;而如果只对新数据进行训练,模型在旧任务上的性能会降低,导致“灾难性遗忘问题”,而且增量学习算法大多用于图像分类的任务上,而目标检测方向需要更注重前景和背景的分离以及目标的精准定位,有时图像中还不止包含一种类型的目标。
技术实现思路
1、本公开意图提供一种基于多角度增量学习的动态三维成像雷达异物检测方法及计算机可读存储介质,有效提高了模型的检测速度,有效改善了“灾难性遗忘问题”。
2、根据本公开的方案之一,提供一种基于多角度增量学习的动态三维成像雷达异物检测方法,包括:
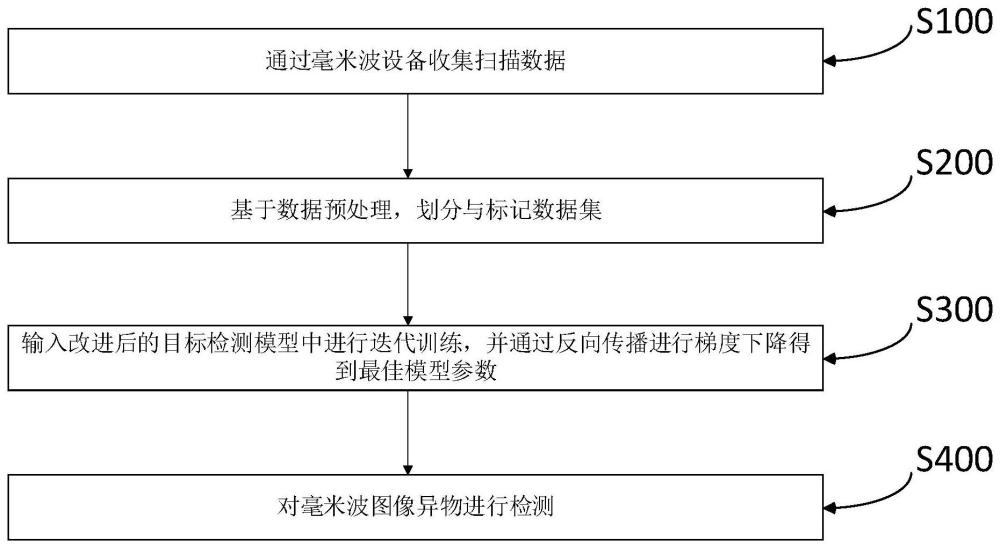
3、通过毫米波设备收集扫描数据;
4、基于数据预处理,划分与标记数据集;
5、输入改进后的目标检测模型中进行迭代训练,并通过反向传播进行梯度下降得到最佳模型参数;
6、对毫米波图像异物进行检测。
7、在一些实施例中,其中,通过毫米波设备收集扫描数据,包括:
8、通过毫米波安检设备对目标多个角度进行成像;
9、按类别对采集到的数据进行分类。
10、在一些实施例中,其中,划分与标记数据集,包括:
11、将每类样本按预设比例分为训练集、验证集和测试集,设置a类基本样本和b类增量样本;
12、对训练数据集进行标记。
13、在一些实施例中,其中,输入改进后的目标检测模型中进行迭代训练,并通过反向传播进行梯度下降得到最佳模型参数,包括:
14、采用resnet-50作为基准主干网络实现对目标图像的特征提取;
15、采用rpn网络使优化候选框;
16、修改训练超参数,设置包括learning_rate、batch_size、max_iters在内的参数进行训练,重复预设轮次数量得到训练完成的目标检测网络;
17、至少基于引入增量学习方法,使模型保留之前学习到的知识。
18、在一些实施例中,其中,特征提取,包括:
19、设置初始化参数;
20、在resnet-50网络中引入残差拆分注意力模块,作为主干网络;
21、将一组目标的z张图像进行concat操作后输入主干网络形成多层特征图p1;
22、将p1分为相同的两支,其中一支输入残差卷积层后,在通道维度上分为k个基本特征组;
23、将每个基本特征组分为r个微型特征组则输入总共沿着通道尺寸被拆分成g=k×r组,其中表示跨多个拆分的元素的累加和;
24、对拆分的每个经过卷积层得到特征图组p2;
25、对p2进行sum操作,得到特征图组p3;
26、将p3经过全局池化层,得到通道权重统计量并产生特征图组p4;
27、将p4经过r个不同的全连接层得到特征图组p5;
28、将p5经过r-softmax层后与每个相乘,并将相乘之后的结果进行sum操作得到特征图组p6;
29、将p6与其他基本特征组得到的输出进行concat操作,再通过卷积层得到拆分注意力模块的输出特征图组p7;
30、将p7与另一支p1进行sum操作得到残差拆分注意力模块的总输出特征图组p8。
31、在一些实施例中,其中,优化候选框,包括:
32、p8经过卷积之后,输出分为两支,其中一支经过卷积再进行分类和回归;
33、另一支经过卷积,用于预测锚框与真实框之间的偏移量;
34、定义rpn损失函数以指导模型更新权重;
35、将候选区域池化为相同大小的特征图p9,再将p9展平通过全连接层得到预测结果;
36、去除同一目标重叠的框。
37、在一些实施例中,其中,定义rpn损失函数以指导模型更新权重
38、
39、
40、
41、
42、其中,pi表示第i个anchor预测为真实标签的概率,pi*当为正样本时值为1,当为负样本时值为0,ti表示预测第i个anchor的边界框回归参数,表示第i个anchor对应的真实框的边界框回归参数,ncls表示一个mini-batch中的所有样本数量,nreg表示anchor位置的个数,μ表示平衡系数,lcls表示分类损失,lreg表示边界框回归损失。
43、在一些实施例中,其中,去除同一目标重叠的框,包括:
44、经分类器得到i个候选框,确定其对应属于该类别的概率得分为qi;
45、计算候选框之间的iou值;
46、重复确定qi以及计算iou值,每个类别目标只剩下一个候选框。
47、在一些实施例中,其中,对毫米波图像异物进行检测,包括:
48、将预处理后的图像制作成数据集后形成毫米波人体安检图像数据集;
49、将未经过训练的数据集输入训练完成的检测网络中,通过模型输出检测结果,必要时形成文件形式。
50、在一些实施例中,其中,预处理,包括:
51、使用高斯滤波对图像进行降噪;和/或
52、使用直方图均衡化提高图像的对比度。
53、本公开的各种实施例的基于多角度增量学习的动态三维成像雷达异物检测方法及计算机可读存储介质,至少通过毫米波设备收集扫描数据;基于数据预处理,划分与标记数据集;输入改进后的目标检测模型中进行迭代训练,并通过反向传播进行梯度下降得到最佳模型参数;对毫米波图像异物进行检测,从而利用增量学习的特点,以准网络进行异物(例如违禁品)检测,在骨干网络中引入残差拆分注意力模块,并对其卷积模块进行改进以增强对多角度目标的特征识别,在损失函数中引入l2正则化惩罚项,减轻模型对旧数据的遗忘。本公开各实施例有效提高了模型的检测速度,有效改善了“灾难性遗忘问题”。
54、应当理解,前面的大体描述以及后续的详细描述只是示例性的和说明性的,并非对所要求保护的本公开的限制。
技术特征:1.基于多角度增量学习的动态三维成像雷达异物检测方法,包括:
2.根据权利要求1所述的方法,其中,通过毫米波设备收集扫描数据,包括:
3.根据权利要求2所述的方法,其中,划分与标记数据集,包括:
4.根据权利要求3所述的方法,其中,输入改进后的目标检测模型中进行迭代训练,并通过反向传播进行梯度下降得到最佳模型参数,包括:
5.根据权利要求4所述的方法,其中,特征提取,包括:
6.根据权利要求2所述的方法,其中,优化候选框,包括:
7.根据权利要求4所述的方法,其中,定义rpn损失函数以指导模型更新权重
8.根据权利要求7所述的方法,其中,去除同一目标重叠的框,包括:
9.根据权利要求8所述的方法,对毫米波图像异物进行检测,包括:
10.根据权利要求1至9中任一项所述的方法,预处理,包括:
技术总结本公开涉及基于多角度增量学习的动态三维成像雷达异物检测方法,方法包括:通过毫米波设备收集扫描数据;基于数据预处理,划分与标记数据集;输入改进后的目标检测模型中进行迭代训练,并通过反向传播进行梯度下降得到最佳模型参数;对毫米波图像异物进行检测。通过本公开各实施例有效提高了模型的检测速度,有效改善了“灾难性遗忘问题”。技术研发人员:谭维贤,何雨新,苏耘,董亦凡,徐伟,乞耀龙,黄平平受保护的技术使用者:内蒙古工业大学技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/156431.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。