一种信号处理的方法以及相关装置与流程
- 国知局
- 2024-07-30 11:25:19
本技术涉及光电,并且更具体地,涉及一种信号处理的方法以及相关装置。
背景技术:
1、激光雷达是无人驾驶系统最重要的传感器之一,其中,调频连续波(frequencymodulated continuous wave,fmcw)雷达是汽车雷达中常用的雷达体制,而基于fmcw雷达能够实现目标测距、目标测速等功能。以测距为例,fmcw雷达通过频率调制激光发射信号和回波信号形成稳定的拍频信号来解算距离。基于fmcw的测距原理可知,为达到测距的高分辨率,基于fmcw雷达的测距系统需要保证很高的频率调制线性度。但是受限于诸多非理想因素,在实际应用场景下,激光雷达的频率调制通常是非线性的,这极大地限制了测距精度。在测速等检测场景中同理。
2、因此,如何实时准确地校正激光器调频的非线性,是亟需解决的问题。
技术实现思路
1、本技术实施例提供一种信号处理的方法以及相关装置,可以通过第一调频信号和具体时段对应的第一反馈信号,确定第一预失真信号,能够实时准确地校正激光器调频的非线性。
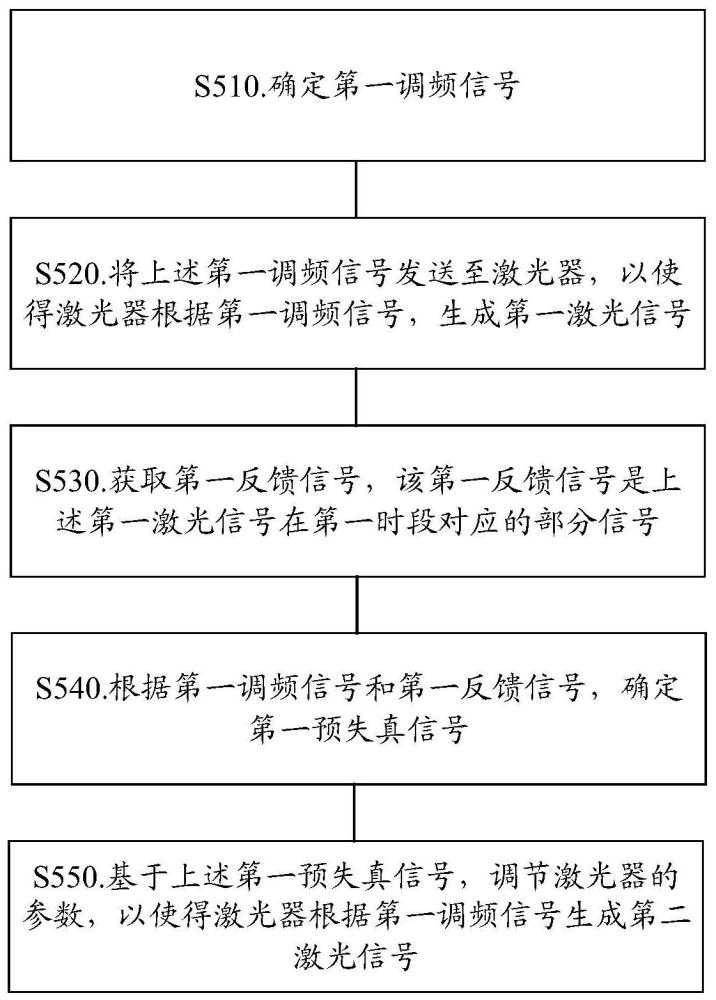
2、第一方面,提供了一种信号处理的方法,该方法包括:确定第一调频信号;将第一调频信号发送至激光器,以使得激光器根据第一调频信号,生成第一激光信号;获取第一反馈信号,该第一反馈信号是第一激光信号在第一时段对应的部分信号;根据上述第一调频信号和上述第一反馈信号,确定第一预失真信号;基于该第一预失真信号,调节激光器的参数,以使得激光器根据上述第一调频信号生成第二激光信号。
3、示例地,上述第一时段既可以是一个较短的时间段,也可以是一个时间点,即第一时刻。其中,第一时段可以是当前时段,也可以是历史时段,进而第一时刻可以是当前时刻,也可以是历史时刻。
4、示例地,上述第一调频信号、第一反馈信号、第一预失真信号等非激光器发射出去的信号,均为信号处理系统中的电信号,而激光器发射出去的第一激光信号是一种光信号。
5、示例地,上述第一激光信号的预失真信号更新方式,包括快更新、慢更新以及指定时段内不更新的选择。因此,外界环境变化剧烈,要求预失真信号的更新速度能快速响应变化,以保障校正的跟踪能力。当外界环境稳定时,对应预失真信号也会较稳定,可策略性考虑慢更新或者指定时段内不更新。
6、示例地,可以对激光器调频的行为模型建模,可以从时域角度建模,也可以从频域角度建模。
7、基于上述技术方案,将第一激光信号中第一时段甚至是第一时刻对应的部分信号用于作为第一反馈信号,并基于该第一反馈信号确定第一预失真信号,能够对第一激光信号进行校正补偿,增加了基于激光雷达进行目标检测的准确性。
8、结合第一方面,在第一方面的某些实现方式中,在根据第一调频信号和第一反馈信号,确定第一预失真信号之前,以第一调频信号为基准调节第一反馈信号,使第一反馈信号与第一调频信号的时延和/或增益对齐。
9、基于上述技术方案,能够将上述第一反馈信号和上述第一调频信号的时频关系对齐,增加了信号处理的准确性。
10、结合第一方面,在第一方面的某些实现方式中,对上述第一调频信号进行快速傅里叶变换fft,确定第二调频信号;对上述第一反馈信号进行fft,确定第二反馈信号;将第二调频信号和第二反馈信号输入至第一补偿模型,以确定第一模型参数,该第一补偿模型包括误差信号项和模型参数项,误差信号项是基于第二调频信号和第二反馈信号之间的偏差确定的,模型参数项包括第一模型参数和频域基函数,第一模型参数是在第一补偿模型的迭代计算满足迭代结束条件时确定的,迭代结束条件包括误差信号项和模型参数项在向量空间中的向量之差为零向量;根据第一模型参数,确定第二预失真信号;对该第二预失真信号进行快速傅里叶逆变换(inverse fast fourier transform,ifft),确定上述第一预失真信号。
11、示例地,上述第一调频信号可以是一种调频周期较大的调频信号,以至于基于现有的数字预失真(digital predistortion,dpd)方法难以保证根据上述第一时段对应的调频信号,确定预失真信号的准确性。
12、示例地,可以通过在频域上建模的方式,基于上述第二调频信号和第二反馈信号,确定关于第二预失真信号的信号表达式,进而能够确定第一预失真信号的信号表达式。基于此,当确定信号表达式的各个参数后,即可快速确定当前第一预失真信号的表达式。
13、基于上述技术方案,在频域上进行信号处理的过程中,由于频域不受限于时域限制条件,只需要选取频域信号中的几个阶的信号,即可准确地解算出模型参数,并确定第一预失真信号,能够实现准实时的对第一激光信号的校正补偿,在增加调频信号校正的实时性的同时,还保障了调频信号校正的准确性。
14、结合第一方面,在第一方面的某些实现方式中,上述第一模型参数通过如下公式(1)表示:
15、
16、其中,表示第l个模型项在第n次迭代时对应的第一模型参数,n∈[1,n],n表示第一模型参数在第一补偿模型的迭代计算满足迭代结束条件时对应的迭代次序,表示第l个模型项在第n-1次迭代时对应的第一模型参数,μ表示迭代步径,表示第二反馈信号相较于第二调频信号在第n-1次迭代时的误差,gl(f)表示第l个模型项对应的频域基函数。
17、示例地,上述第一模型参数可以包括上述第二调频信号的幅值和相移值。
18、基于上述技术方案,通过一个确定的迭代公式,来表示上述第一模型参数,因为除第一模型参数之外的所有变量都能够获取到,所以能够直接通过迭代计算确定第一模型参数,以使得第一补偿模型能够快速收敛。
19、结合第一方面,在第一方面的某些实现方式中,上述第二预失真信号通过如下公式(2)表示:
20、
21、其中,表示经过n次迭代后得到的第二预失真信号,表示第l个模型项在第n次迭代时对应的第一模型参数,n∈[1,n],n表示第一模型参数在第一补偿模型的迭代计算满足迭代结束条件时对应的迭代次序,表示第二调频信号。
22、基于上述技术方案,通过一个确定的公式,来表示上述第二预失真信号,所以在确定第一模型参数之后,即可直接获得第二预失真信号的表达式,计算效率高,并且该表达式能够表示一个完整的信号,保障了对激光器校正的实时性和准确性。
23、结合第一方面,在第一方面的某些实现方式中,将第二调频信号和第二反馈信号通过傅里叶级数展开表示;根据经过傅里叶级数展开后的第二调频信号和第二反馈信号,确定第二调频信号和第二反馈信号对应的幅相补偿参数,该幅相补偿参数属于第一模型参数;根据上述幅相补偿参数,确定第二预失真信号。
24、示例地,在确定上述幅相补偿参数后,即可确定具有一般性的第二预失真信号的信号表达式,该表达式可以由如下公式(3)表示:
25、
26、其中,表示经过n次迭代后得到的第二预失真信号,表示第k个模型项在第n次迭代时第二调频信号的幅值,属于上述幅相补偿参数,f0表示第二调频信号的频率,表示第k个模型项在第n次迭代时第二调频信号的相移值,属于上述幅相补偿参数,t表示时间。
27、基于上述技术方案,通过傅里叶级数展开的方式,能够进一步确定第二预失真信号的信号模型表达式,所以在实时地获取到信号模型表达式中各个参数后,基于信号模型表达式即可实时地确定第二预失真信号,降低了解算第一模型参数,和确定第二预失真信号的复杂度,进一步增加了校正调频信号的实时性。
28、结合第一方面,在第一方面的某些实现方式中,在将第二调频信号和第二反馈信号输入至第一补偿模型之前,截取低阶带宽内的第二调频信号和第二反馈信号。
29、示例地,在时域中,可以选取时域上感兴趣区域(region of interest,roi)的信号,忽视对激光器调频的拐点部分的调频信号。
30、示例地,在频域中,可以在频域上对频率做带限处理,包括不限于直接截断或者经过滤波器滤波。
31、基于上述技术方案,截取低阶带宽内的第一调频信号和第一反馈信号确定第一预失真信号,可以减小模型阶数,降低算力开销。一方面,激光器调频在高频处存在谐振等因素,调频的响应并不准确,对高频校正可能会导致性能恶化。另一方面,高频部分也不是影响激光器调频线性度性能的主要因素,所以频域的带限处理,可以提升校正的准确性和降低模型计算复杂度。
32、第二方面,提供了一种信号处理的装置,该装置包括:确定单元,用于确定第一调频信号;发送单元,用于将第一调频信号发送至激光器,以使得激光器根据第一调频信号,生成第一激光信号;获取单元,用于获取第一反馈信号,第一反馈信号是第一激光信号在第一时段对应的部分信号;处理单元,用于根据第一调频信号和第一反馈信号,确定第一预失真信号;并且基于第一预失真信号,调节激光器的参数,以使得激光器根据第一调频信号生成第二激光信号。
33、基于上述技术方案,将第一激光信号中第一时段甚至是第一时刻对应的部分信号用于作为第一反馈信号,并基于该第一反馈信号确定第一预失真信号,能够对第一激光信号进行校正补偿,增加了基于激光雷达进行目标检测的准确性。
34、结合第二方面,在第二方面的某些实现方式中,上述处理单元还用于:以第一调频信号为基准调节第一反馈信号,使第一反馈信号与第一调频信号的时延和/或增益对齐。
35、基于上述技术方案,能够将第一反馈信号和第一调频信号的时频关系对齐,增加了信号处理的准确性。
36、结合第二方面,在第二方面的某些实现方式中,上述处理单元具体用于:对第一调频信号进行快速傅里叶变换fft,确定第二调频信号;对第一反馈信号进行fft,确定第二反馈信号;将第二调频信号和第二反馈信号输入至第一补偿模型,以确定第一模型参数,第一补偿模型包括误差信号项和模型参数项,误差信号项是基于第二调频信号和第二反馈信号之间的偏差确定的,模型参数项包括第一模型参数和频域基函数,第一模型参数是在第一补偿模型的迭代计算满足迭代结束条件时确定的,迭代结束条件包括误差信号项和模型参数项在向量空间中的向量之差为零向量;根据第一模型参数,确定第二预失真信号;对第二预失真信号进行快速傅里叶逆变换ifft,确定第一预失真信号。
37、基于上述技术方案,在频域上进行信号处理的过程中,由于频域不受限于时域限制条件,只需要选取频域信号中的几个阶的信号,即可准确地解算出模型参数,并确定第一预失真信号,能够实现准实时的对第一激光信号的校正补偿,在增加调频信号校正的实时性的同时,还保障了调频信号校正的准确性。
38、结合第二方面,在第二方面的某些实现方式中,上述第一模型参数通过如下公式(4)表示:
39、
40、其中,表示第l个模型项在第n次迭代时对应的第一模型参数,n∈[1,n],n表示第一模型参数在第一补偿模型的迭代计算满足迭代结束条件时对应的迭代次序,表示第l个模型项在第n-1次迭代时对应的第一模型参数,μ表示迭代步径,表示第二反馈信号相较于第二调频信号在第n-1次迭代时的误差,gl(f)表示第l个模型项对应的频域基函数。
41、基于上述技术方案,通过一个确定的迭代公式,来表示上述第一模型参数,因为除第一模型参数之外的所有变量都能够获取到,所以能够直接通过迭代计算确定第一模型参数,以使得第一补偿模型能够快速收敛。
42、结合第二方面,在第二方面的某些实现方式中,上述第二预失真信号通过如下公式(5)表示:
43、
44、其中,表示经过n次迭代后得到的第二预失真信号,表示第l个模型项在第n次迭代时对应的第一模型参数,n∈[1,n],n表示第一模型参数在第一补偿模型的迭代计算满足迭代结束条件时对应的迭代次序,表示第二调频信号。
45、基于上述技术方案,通过一个确定的公式,来表示上述第二预失真信号,所以在确定第一模型参数之后,即可直接获得第二预失真信号的表达式,计算效率高,并且该表达式能够表示一个完整的信号,保障了对激光器校正的准实时性和准确性。
46、结合第二方面,在第二方面的某些实现方式中,上述处理单元还用于:将第二调频信号和第二反馈信号通过傅里叶级数展开表示;根据经过傅里叶级数展开后的第二调频信号和第二反馈信号,确定第二调频信号和第二反馈信号对应的幅相补偿参数,该幅相补偿参数属于第一模型参数;根据上述幅相补偿参数,确定第二预失真信号。
47、示例地,在确定上述幅相补偿参数后,即可确定具有一般性的第二预失真信号的信号表达式,该表达式可以由如下公式(6)表示:
48、
49、其中,表示经过n次迭代后得到的第二预失真信号,表示第k个模型项在第n次迭代时第二调频信号的幅值,属于上述幅相补偿参数,f0表示第二调频信号的频率,表示第k个模型项在第n次迭代时第二调频信号的相移值,属于上述幅相补偿参数,t表示时间。
50、基于上述技术方案,通过傅里叶级数展开的方式,能够进一步确定第二预失真信号的信号模型表达式,所以在实时地获取到信号模型表达式中各个模型参数后,基于信号模型表达式即可实时地确定第二预失真信号,降低了解算第一模型参数和确定第二预失真信号的复杂度,进一步增加了校正调频信号的实时性。
51、结合第二方面,在第二方面的某些实现方式中,上述处理单元还用于:在将第二调频信号和第二反馈信号输入至第一补偿模型之前,截取低阶带宽内的第二调频信号和第二反馈信号。
52、基于上述技术方案,截取低阶带宽内的第一调频信号和第一反馈信号确定第一预失真信号,可以减小模型阶数,降低算力开销。一方面,激光器调频在高频处存在谐振等因素,调频的响应并不准确,对高频校正可能会导致性能恶化。另一方面,高频部分也不是影响激光器调频线性度性能的主要因素,所以频域的带限处理,可以提升校正的准确性和降低模型计算复杂度。
53、第三方面,提供了一种信号处理的装置,包括处理器和存储器,其中,处理器和存储器相连,其中,存储器用于存储程序代码,处理器用于调用程序代码,以执行上述第一方面的方法设计中任意一种可能的实现方式中的方法。
54、第四方面,提供了一种芯片系统,芯片系统应用于电子设备;芯片系统包括一个或多个接口电路,以及一个或多个处理器;接口电路和处理器通过线路互联;接口电路用于从电子设备的存储器接收信号,并向处理器发送信号,信号包括存储器中存储的计算机指令;当处理器执行计算机指令时,电子设备执行上述第一方面的方法设计中任意一种可能的实现方式中的方法。
55、第五方面,提供了一种计算机可读存储介质,存储有计算机程序或指令,该计算机程序或指令用于实现第一方面的方法设计中任意一种可能的实现方式中的方法。
56、第六方面,提供了一种计算机程序产品,该计算机程序代码或指令在计算机上执行时,使得计算机执行上述第一方面的方法设计中任意一种可能的实现方式中的方法。
57、第七方面,提供了一种车辆,该车辆包括如第二方面或第三方面中任一种可能实现方式中的装置。
本文地址:https://www.jishuxx.com/zhuanli/20240730/156642.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表