一种潜射无人机的实时可靠性评估系统及方法
- 国知局
- 2024-07-31 22:38:58
本发明公开一种潜射无人机的实时可靠性评估系统及方法,属于可靠性评估。
背景技术:
1、随着潜射无人机技术的发展,其可靠性问题也越来越受到重视,作为潜艇等水下平台的“耳目”,一旦发生故障,无人机无法从运载器弹射起飞或者无人机在空中失去动力,会造成不可挽回的损失,因此评估潜射无人机的实时可靠度,避免故障的发生成为一个重要的问题。在潜射无人机的可靠性研究方面,传统无人机的相关研究已经趋于成熟,但是对于这种跨介质无人机的可靠性分析并不多,跨介质涉及到复杂的动力学问题。对于运载器从潜艇发射到无人机弹射到空中的整个作业工程涉及到多种部件的协同作业,在进行可靠性分析时需要借助传统可靠性分析方法找出其潜在故障模式,但是传统的可靠性评估方法很难进行实时可靠度评估,不能基于部件的实时状态给出不同时刻的实时可靠度。同时潜射无人机不同于普通无人机,潜射无人机的可靠性分析还涉及到运载器的可靠性、跨介质问题等,潜射无人机会遇到诸如运载器丧失动力、运载器发射角错误、折叠翼无法展开的故障,因此分析潜其从运载器水下发射到无人机水面弹射的过程是潜射无人机可靠性分析的重中之重。实时可靠性评估需要具有高精度和实时性。考虑到机器学习、深度学习方法可以高效准确的提炼出潜射无人机状态监测数据中的异常,可以很好的满足实时可靠性分析中的时效性要求。基于上述情况,本发明基于深度学习方法公开了一种潜射无人机的实时可靠性评估系统及方法。
技术实现思路
1、本发明的目的在于提供一种潜射无人机的实时可靠性评估系统及方法,以解决现有技术中,潜射无人机的实时可靠性评估效果差的问题。
2、一种潜射无人机的实时可靠性评估系统,包括潜射无人机系统、数据监测模块、数据传输存储模块、数据评估模块和报警系统,数据监测模块采集潜射无人机系统各个部件的实时状态数据,经过数据预处理后将数据上传至数据传输存储模块,数据传输存储模块将数据存储到云端数据库后发送给数据评估模块,经数据评估模块的神经网络模型训练完成生成实时可靠性评估报告,报警系统将报告上传数据传输存储模块的数据库,若实时可靠度低于阈值,则报警系统报警,并更新网络模型。
3、数据监测模块由分布式多传感器组成,包括转速传感器、温度传感器、压力传感器和imo姿态角传感器,数据监测模块利用故障树法fta或故障模式和影响分析法fmea进行可靠性分析,找出潜射无人机系统的潜在故障类型,针对每种潜在故障类型分别布置一种传感器进行数据监测,数据监测模块采集运载器和无人机的部件状态数据以及环境数据;
4、数据传输模块通过声呐、无线电、卫星通信实现数据传输以及无人机、运载器和潜艇的互联;
5、无人机和运载器通过无线电通信,运载器和潜艇之间通过声呐通信,无人机、运载器和潜艇三者之间通过卫星通信访问边缘计算服务器;数据传输模块将传感器特征信号通过上位机上载到边缘计算服务器中的云端数据库中,云端数据库包括历史故障数据库、实时监测数据库、专家经验数据库、故障特征数据集。
6、数据评估模块包括运载器基于ssa-bp神经网络的实时可靠性模型。
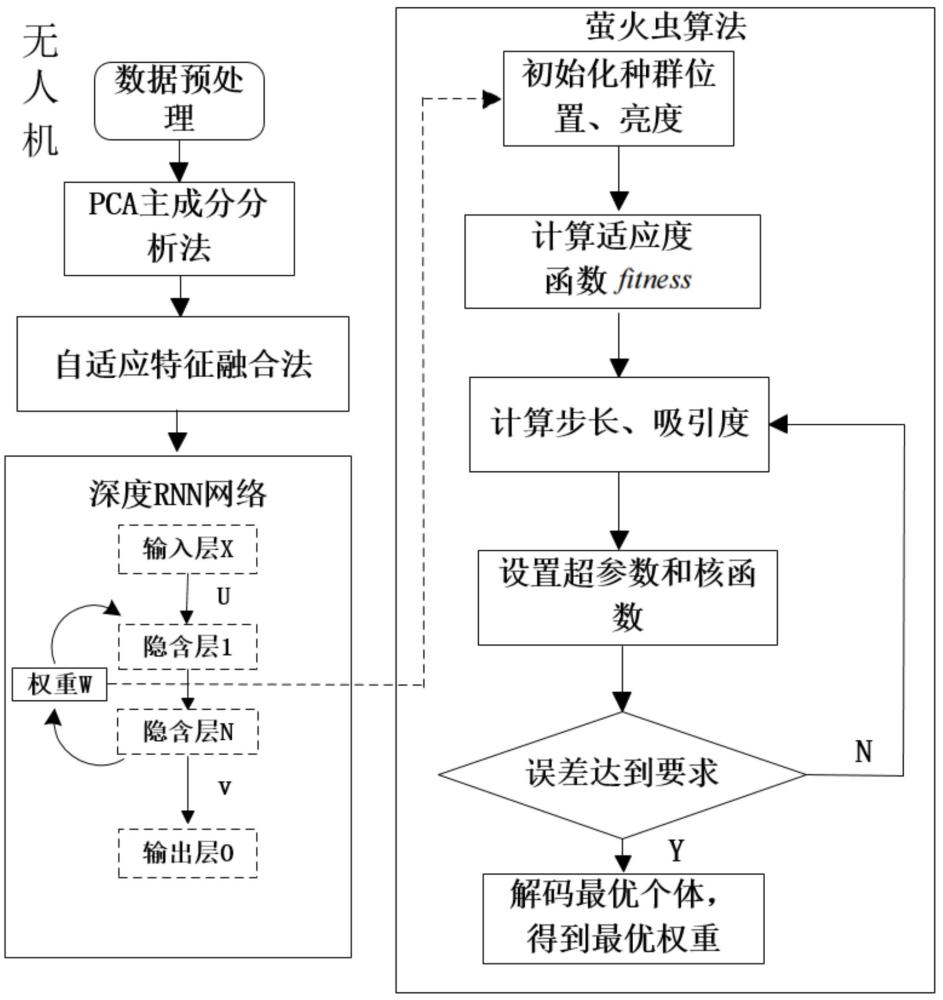
7、数据评估模块包括无人机基于萤火虫算法与深度循环神经网络rnn相结合的实时可靠性模型。
8、数据评估模块利用卫星通信访问边缘计算云端服务器,生成可靠性报告,计算出的实时可靠度低于阈值则报警系统报警;
9、报警系统的包括生成工作日志、操作控制台和维护修理,报警系统报警时操作员通过操作控制台控制潜射无人机取消发射任务进行预维修或者调整飞行姿态避免进一步损失,工作日志根据数据评估模块的可靠性报告生成日志上传到云端数据库中,并更新训练模型。
10、一种潜射无人机的实时可靠性评估方法,使用所述的一种潜射无人机的实时可靠性评估系统,包括:
11、s1数据采集,通过可靠性分析方法进行故障模式分析,确定潜在故障类型,针对每种故障类型布置传感器进行数据监测,数据监测包括转速、温度、压力、姿态角,对传感器获取的原始数据进行预处理,预处理手段包括数据清洗、数据降维、异常检测;
12、s2数据传输与存储,数据传输模块通过声呐、无线电和卫星通信实现无人机、运载器和潜艇之间的互联,通过卫星通信便捷的访问边缘计算云端服务器,将采集到的传感器特征信号通过卫星通信存储至边缘计算服务器的云端数据库;
13、s3无人机实时可靠性评估,无人机基于萤火虫算法与深度循环神经网络rnn相结合的实时可靠性模型先经过主成分分析法进行特征提取,然后利用自适应特征融合法进行特征融合,将融合后的数据作为深度循环神经网络rnn的输入层,同时利用萤火虫算法计算出最优的隐藏层权重矩阵,代入rnn模型的隐藏层中,完成模型训练后,达到误差要求输出实时可靠性评估报告;
14、s4运载器实时可靠性评估,运载器基于ssa-bp神经网络的实时可靠性模型先经过深度自编码网络进行特征提取,之后用流形正则化方法进行特征数据降维,利用降维后的数据分为测试集和训练集进行神经网络模型的训练,利用麻雀搜索算法ssa计算bp神经网络中隐藏层的权重矩阵,计算出最优参数后完成模型训练输出实时可靠性评估报告。
15、s3包括:
16、s3.1利用主成分分析法对转速、温度、压力、姿态角进行特征提取,特征提出后对样本矩阵进行降维;
17、s3.1.1将s1中经过数据预处理的传感器采集数据作为长度为m的时序信号,假设有m个特征,n个数据样本,这n个数据所组成的矩阵记为d;
18、s3.1.2标准化处理后,根据累计贡献率大小选取前m个主成分,完成降维处理。
19、s3包括:
20、s3.2将s3.1中的特征提取结果利用自适应特征融合方法asff进行特征融合;
21、s3.2.1计算特征值之间的距离di;
22、s3.2.2在同一时刻,i代表第i个特征,j代表第j个特征,d表示维度值,计算i≠j时的k个d值,在k个d值中找出最小值,作为权重分配的方式wi;
23、s3.2.3在权值赋值完毕后,根据赋值的不同进行加权平均。
24、s3包括:
25、s3.3将经过特征融合的特征向量输入到深度循环神经网络rnn中,将特征向量作为输入层进行rnn模型的训练,利用萤火虫算法计算隐含层的最优权重矩阵;
26、s3.3.1rnn网络模型训练过程方程;
27、s3.3.2rnn的前向传播法进行迭代运算;
28、s3.3.3引入萤火虫算法进行rnn深度循环网络中隐含层的最优权重矩阵;
29、s3.3.4计算损失函数并更新rnn网络;
30、s3.3.5输出无人机实时可靠性结果;
31、s3.4报警系统报警。
32、s4包括:
33、s4.1对转速、温度、压力、姿态角进行分析,利用深度自编码网络进行特征提取;
34、s4.2将s3.1中提取的特征矩阵利用利用最大投影差方法进行特征矩阵的降维;
35、s4.2.1将s4.1中特征提取的数据集s1写成矩阵形式;
36、s4.2.2选取投影方差最大作为目标函数并求解;
37、s4.3将降维的特征向量输入到ssa-bp神经网络模型中,利用麻雀搜索算法ssa计算bp神经网络中最优权值、阈值,将数据监测模块的数据分为测试集和训练集展开模型训练,完成模型训练输出实时可靠性评估报告;
38、s4.3.1首先确定ssa-bp网络各层的节点数量,然后选择隐含层和输出层的传递函数,并初始化权值阈值、迭代次数;
39、s4.3.2采用正向传播法验证初始权值、阈值模型的误差是否满足要求;
40、s4.3.3若误差不满足要求,引入麻雀搜索算法进行bp神经网络中权值和阈值的调整优化,找到最优权值阈值;
41、s4.3.4输出运载器实时可靠性结果;
42、s4.4报警系统报警。
43、相对比现有技术,本发明具有以下有益效果:本发明提出了一种基于传感器数据的实时可靠性评估方法,通过传统可靠性分析方法确定潜在故障类型,并布置传感器进行数据监测,包括部件状态和环境数据。对传感器获取的原始数据进行预处理,包括数据清洗、数据降维和异常检测等。利用pca主成分分析法和自编码网络方法对传感器监测数据进行特征提取和降维。利用深度循环神经网络(rnn)和ssa-bp神经网络分别对无人机和运载器的可靠性模型进行训练。通过萤火虫算法(firefly)和麻雀搜索算法(ssa)计算网络模型最优参数,可以提高模型的训练效果和预测准确性。本发明可持续实时输出潜射无人机可靠性评估结果和评估报告,可以及时发现和预测系统的故障和可靠性问题,为运维人员提供决策支持和故障排除的依据。
本文地址:https://www.jishuxx.com/zhuanli/20240730/193996.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。