基于Modelica的无人艇动力学多领域耦合建模方法
- 国知局
- 2024-07-31 22:50:45
本发明属于模型化无人艇动力学领域,具体涉及基于modelica的无人艇动力学多领域耦合建模方法。
背景技术:
1、随着海洋资源开发与利用的不断深入,无人水面艇(unmanned surface vehicle,usv)凭借其高效、安全的特点,在军事侦察、海洋探测等领域发挥着日益重要的作用。无人艇作为一种自主导航的水面无人平台,其研究和应用已经成为海洋工程及相关学科的重要领域之一。传统的无人艇建模仿真技术多集中于单一系统的分析,如机械系统、液压系统或控制系统等,这些方法虽然在各自领域内取得了一定的成果,但面临着模型融合难、仿真效率低等挑战。
2、在大的背景技术方面,无人水面艇系统的建模仿真涉及复杂的多领域耦合问题,包括但不限于本体动力学系统、控制系统、动力系统、传动系统以及喷水推进系统等。这些系统的耦合与交互对无人艇的设计、调试及性能优化至关重要。现有的研究通常采用matlab/simulink、simscape等工具建立仿真模型,或将数字孪生技术应用于无人艇研究中,尽管这些方法为无人艇的设计与分析提供了重要的理论和实践基础,但依旧存在模型的可重用性和可重构性差,多类模型融合困难的问题。
3、在小的背景技术方面,尽管已有的研究在无人艇的单一系统建模仿真方面取得了进展,如基于matlab/simulink、simscape等工具的船舶推进系统、喷水推进倒航控制系统的建模与仿真,以及利用modelica语言进行大功率舰用柴油机模型的建立和故障模拟等,但这些研究未能充分解决无人艇系统的多领域耦合性问题。特别是在动力学系统、控制系统、动力系统、传动系统及喷水推进系统的综合仿真方面,现有技术存在模型融合难、仿真效率低、模型的可重用性和可重构性差等问题。此外,现有研究多采用多个软件建模后再进行联合仿真的方法,容易导致仿真结果与实际情况存在较大偏差的情况出现。
技术实现思路
1、本发明提供了基于modelica的无人艇动力学多领域耦合建模方法,该建模方法采用非因果陈述式建模的modelica语言,结合mworks平台的强大功能,实现了无人艇在直航运动、回转运动、倒车运动及任务型运动等海上作业场景下的多领域统一建模与仿真。通过构建本体动力学系统、控制系统、动力系统、传动系统及喷水推进系统等多领域耦合系统模型,本研究不仅提高了仿真效率,同时也优化了模型的可重用性和可重构性,为无人艇的系统设计、自主航行、路径规划及实时避障等提供了有效的仿真工具。
2、本发明构建的无人艇建模方法,显著提升了无人艇仿真的准确性和效率,特别是在处理复杂的多领域耦合问题上表现出色。通过采用统一的建模语言和平台,本发明不仅简化了无人艇多系统集成的复杂度,还确保了仿真结果的高度一致性和可靠性。此外,本发明还为无人艇的进一步研究和开发,特别是在集群控制等高级功能的研究提供了坚实的基础。
3、为实现上述目的,本发明提供如下技术方案:基于modelica的无人艇动力学多领域耦合建模方法,所述耦合建模方法包括如下步骤:
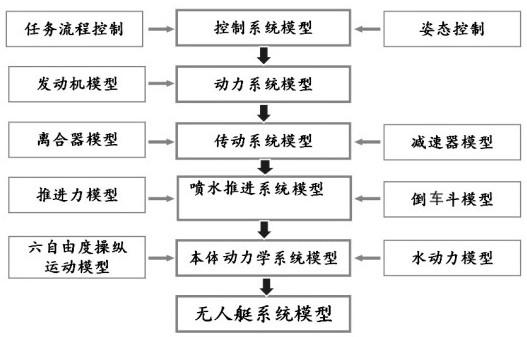
4、步骤1,采用modelica语言对无人艇的五个子系统进行建模,包括无人艇本体动力学系统、无人艇控制系统、无人艇动力系统、无人艇传动系统及无人艇喷水推进系统;
5、步骤2,采用mworks平台,对步骤1中无人艇五个子系统的多领域建模结果进行耦合,得到无人艇仿真平台;
6、步骤3,采用步骤2得到的无人艇仿真平台,对无人艇的运动进行动态响应仿真分析验证。
7、优选的,所述无人艇本体动力学系统建模包括了无人艇运动的六个自由度:纵荡、横荡、垂荡、纵摇、横摇和艏摇,并建立两种右手坐标系,固定坐标系和随船运动坐标系。
8、优选的,所述固定坐标系和随船运动坐标系用来确定无人艇在空间的位置,无人艇在空间的位置取决于随船运动坐标系在固定坐标系中的三个位置向量导数、、,以及随船运动坐标系对于固定坐标系的三个姿态向量导数、、;三个位置向量和三个姿态向量之间的关系式为:
9、 (1)
10、 (2)
11、(3)
12、 (4)
13、其中v为无人艇的重心航速,u,v,w为v在随船运动坐标系上的投影,ω为角速度,p,q,r为ω在随船运动坐标系上的投影。
14、优选的,所述无人艇运动的六个自由度操纵运动数学模型,在随船运动坐标系上的投影式为:
15、 (5)
16、其中是加速度;(qw-rv)、(ru-pw)、(pv-qu)是由于坐标系运动引起的物体向心加速度; (iz - iy)qr、(ix - iz) rp、 (iy - ix)pq是回转效应;无人艇艇体所受到的力表示为:
17、 (6)
18、其中xj、yj、zj、kj、mj、nj表示喷水推进推力的各项分力及其对艇重心的力矩,xh、yh、zh、kh、mh、nh表示艇体受到的各向水动力及其对艇重心的力矩。
19、优选的,所述无人艇动力系统建模包括五个模块,进气系统、排气系统、供油系统、发动机缸和发动机曲轴;并通过如下的控制逻辑方程来描述:
20、 (7)
21、其中,δ m f是调节的燃油喷射量变化, r s是设定的目标转速, r a是实际转速, k p、 k i、和 k d分别是比例、积分和微分的控制系数, t表示时间。
22、优选的,所述无人艇传动系统建模包括了传动装置和离合器;采用如下式表征传动比对输出转速的影响:
23、 (8)
24、其中, ωout是传动系统输出端,即喷水推进器端的角速度, ωin是输入端即发动机端的角速度, i是传动系统的传动比,表示输入转速与输出转速之比;采用如下式表示输出功率与输入功率的关系:
25、 (9)
26、其中, η为传动效率, pout是传动系统输出功率, pin是传动系统输入功率,即发动机输出功率。
27、优选的,所述无人艇喷水推进系统建模包括喷水推进器的喷嘴及其倒车斗喷射水流产生反推力来实现的,喷嘴受力 f n、右倒车斗受力 f dr和左倒车斗受力 f dl为:
28、 (10)
29、其中,vn为喷嘴射流的流速,假设,分流后流速不变,则vn = vdr = vdl = q/sn,其中q为流量,sn为喷嘴的射流面积;ve = (1-ω) vs,vs为无人艇速,ω为伴流系数,
30、喷水推进力及其对无人艇体重心力矩在随船运动坐标系上的投影如式:
31、(11)
32、其中,δj为喷嘴转角,向左转为正; γj为倒车斗转角,定义为倒车斗射流方向和随船运动坐标系x轴的夹角; xj、yj、zj为喷口中心在随船运动坐标系上的坐标;xj、yj、zj、kj、mj、nj表示喷水推进推力的各项分力及其对艇重心的力矩。
33、优选的,所述无人艇控制系统建模是将无人艇在海上的运动分为启动、巡航、到达目标点和驶离四个任务阶段,无人艇的非线性响应模型如式:
34、 (12)
35、其中, α、 β分别为非线性项系数; k、 t、 α、 β均与船舶航速有关,通过试验数据辨识获得,为随船运动坐标系对于固定坐标系的姿态向量二次导数。
36、优选的,所述步骤2中对多领域建模结果进行耦合包括无人艇控制系统与无人艇动力系统的耦合,并且重点关注于对无人艇动力响应的精确控制。
37、优选的,所述步骤3的仿真分析验证包括直航运动仿真验证、回转运动仿真验证、倒航运动仿真验证、任务型仿真验证。
38、与现有技术相比,本发明的有益效果是:
39、1.采用统一的建模语言和平台,采用modelica语言进行建模,结合mworks平台的应用,能够实现对无人艇系统中不同领域,如动力学系统、控制系统、动力系统等的统一建模与仿真。modelica语言的非因果性特点使得模型之间的耦合更加灵活,提高了模型的可重用性和可重构性。同时,mworks平台提供了强大的仿真环境,支持复杂系统的集成仿真,极大地提高了仿真的效率和准确性。根据无人艇的运动特点,选取并采用了适宜的系统模型构建参数及方法,并且通过统一的建模语言和平台减少了多软件许可的成本。提高了仿真的准确性和效率,尤其是在处理多领域耦合问题时。一套工具完成所有建模与仿真工作,用户学习和使用成本降低。
40、2.多领域耦合系统模型的构建,本发明通过构建包括本体动力学系统、控制系统、动力系统、传动系统及喷水推进系统在内的多领域耦合系统模型,实现了无人艇在各种海上作业场景下的动态响应仿真。这种方法能够全面模拟无人艇在实际海洋环境中的表现,提高模型的实际应用价值。提升了模型的全面性和准确性,更贴近实际运行状态的模拟。在一个统一模型框架下实现多领域耦合,简化了系统的复杂度。
41、3.高效的仿真分析验证方法,通过高效的仿真分析验证方法,本发明能够对无人艇在直航、回转、倒车及任务型运动等多种海上作业场景下进行动态响应仿真。这种方法提高了仿真的效率和准确性,能够快速有效地评估无人艇的性能及其在不同条件下的反应,为无人艇的设计和优化提供了科学的依据。通过模拟真实海洋环境和操作场景,仿真结果能够更准确地预测无人艇的性能,为优化设计提供支持。提供了一个高效的仿真验证流程,使得研究人员和工程师能够快速评估和调整设计,减少了实地测试的需求。通过高效的仿真分析减少了对物理原型的依赖,从而降低了研发和测试成本。
42、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194965.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种触控笔的制作方法
下一篇
返回列表