一种装备器材智能采集识别系统及方法
- 国知局
- 2024-07-31 22:52:07
本发明涉及装备器材检测识别,尤其涉及一种装备器材智能采集识别系统及方法。
背景技术:
1、在装备器材的仓库管理过程中,通常使用条码标签及射频识别技术对目标装备器材进行识别并查询存储仓位,且构建了完善的装备器材仓储管理系统,实现了高效的自动化管理。而在基层维修单位实际的装备器材使用保障时,器材包装会被拆掉或撕毁,在装备检修过程中不可避免地导致粘贴在器材上的条码标签污损或损坏,这就导致难以通过包装箱上的条码标签或器材上的条码标签来识别器材,只能通过仓管人员凭经验识别或采用实物比对来识别器材名称或编号,这就导致在装备器材零件数量众多时器材识别效率低下、准确性难以保证。因此,在装备器材使用保障中采用自动化的器材采集识别系统,能够打通仓储管理系统和器材识别过程,提高器材识别的准确率和器材申领效率。
技术实现思路
1、为了提高维修单位装备器材使用保障效率,本发明申请提出了一种装备器材智能采集识别系统及方法。
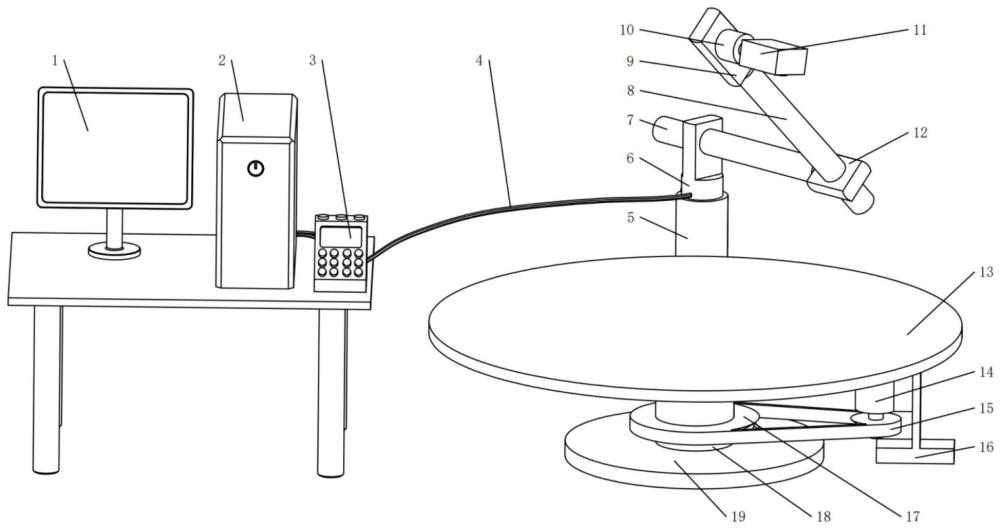
2、本发明一方面提供了一种装备器材智能采集识别系统,该系统包括图片采集装置、装备器材智能识别模型、路径规划软件、电脑主机、显示器以及控制盒,电脑主机分别与显示器和控制盒连接,图片采集装置与控制盒连接,装备器材智能识别模型和路径规划软件均设于电脑主机上,其中:
3、路径规划软件用于规划图片采集装置采集图片时的拍摄路径;
4、控制盒用于接收路径规划软件规划出的拍摄路径并控制图片采集装置沿着拍摄路径运动;
5、图片采集装置用于在控制盒控制下沿着拍摄路径采集待识别装备器材的图片,并将采集到的图片发送至电脑主机;
6、电脑主机接收待识别装备器材的图片并通过设于其上的装备器材智能识别模型处理,得到待识别装备器材的器材编码和器材名称,并将待识别装备器材的器材编码和器材名称通过显示器显示。
7、优选地,图片采集装置包括转盘组件、机械臂以及设于机械臂顶部末端的图像采集模块,其中,
8、转盘组件用于放置待识别装备器材并带动其转动;
9、图像采集模块用于采集放置在转盘组件上并随转盘组件转动的待识别装备器材的图片;
10、机械臂用于调整图像采集模块和待识别装备器材的相对位置,使图像采集模块上的摄像头始终正对着待识别的装备器材。
11、优选地,机械臂包括在三维空间上相互垂直的第一连杆、第二连杆和第三连杆,以及分别位于第一连杆末端且用于驱动第二连杆在水平面上旋转的第一步进电机,位于第二连杆末端且用于驱动第三连杆在垂直平面上旋转的第二步进电机,位于第三连杆末端且用于驱动图像采集模块绕第三连杆轴线旋转的第三步进电机,第一步进电机、第二步进电机、第三步进电机上的线束均与控制盒连接。
12、优选地,图像采集模块包括拍摄模块和第四步进电机,拍摄模块固设于第四步进电机的转轴上,第四步进电机本体固定连接在第三步进电机的转轴上,第四步进电机本体可绕第三步进电机的转轴旋转,第四步进电机上的线束与控制盒连接。
13、优选地,拍摄模块包括摄像头和补光灯,摄像头用于拍摄待识别装备器材的图片,补光灯用于为待识别装备器材拍照时提供照明。
14、优选地,转盘组件包括底座、设于底座上的支撑杆、位于支撑杆上方且与支撑杆固定连接的转盘、固定套设在支撑杆下方且靠近底座一侧的同步带轮、固设于地面的电机支架、安装在电机支架上的第五步进电机以及同步带,第五步进电机通过同步带驱动同步带轮带动转盘转动。
15、本发明另一方面还提供了一种装备器材智能采集识别方法,采用如上所述的装备器材智能采集识别系统对目标器材进行自动采集并识别,该方法包括如下步骤:
16、s1、搭建装备器材智能采集识别系统,该系统包括图片采集装置、装备器材智能识别模型、路径规划软件、电脑主机、显示器以及控制盒;
17、s2、采用设置在电脑主机上的路径规划软件规划拍摄路径,控制盒根据拍摄路径控制图片采集装置采集待识别装备器材的图片,将采集到的图片存储在电脑主机上;
18、s3、采用设置在电脑主机上的装备器材智能识别模型对待识别装备器材的图片进行处理,得到待识别装备器材的器材编码和器材名称;
19、s4、将待识别装备器材的器材编码和器材名称通过显示器显示。
20、优选地,s2具体包括如下步骤:
21、s21、将待识别装备器材放置在转盘中央;
22、s22、预设拍摄总高度、分层数量、单层拍摄的间隔角度,根据拍摄高度和分层数量计算设定单层拍摄下降高度,根据分层数量和单层拍摄的间隔角度设置拍摄照片的总数,路径规划软件根据拍摄总高度、单层拍摄下降高度、单层拍摄的间隔角度r以及拍摄照片的总数规划出拍摄路径;
23、s23、控制盒接收规划好的拍摄路径,驱动图片采集装置按照拍摄路径运动并采集待识别装备器材的图片;
24、s24、将采集到的待识别装备器材图片传输至电脑主机并按照拍摄的先后顺序命名,将命名后的图片存储在电脑主机上设定的文件夹中。
25、优选地,s3中的装备器材智能识别模型在正式投入使用前还需要进行训练,具体训练过程如下:
26、s31、通过路径规划软件采集不同种类装备器材的图片;
27、s32、使用labelimg软件对采集到的不同种类装备器材的图片进行标注;
28、s33、对标注后的图片进行图像增强和数据归一化处理,根据数据归一化处理后的图片构建数据集,并按照预设比例将数据集划分为训练集、验证集和测试集;
29、s34、预设学习率、训练总次数和每一轮的训练次数,根据预设的学习率采用训练集对装备器材智能识别模型进行训练,每完成一轮训练后,采用验证集对模型进行一次评估验证,直到达到预设的训练总次数,得到经训练和验证后的装备器材智能识别模型;
30、s35、预设识别准确率阈值,采用测试集评估经训练和验证后的装备器材智能识别模型的识别效果并计算识别准确率,将计算得出的识别准确率与预设的识别准确率阈值进行比较,将满足识别准确率要求的装备器材智能识别模型投入正式使用。
31、优选地,s3中的装备器材智能识别模型具体为nanodet深度学习模型。
32、上述一种装备器材智能采集识别系统及方法,包括图片采集装置、装备器材智能识别模型、路径规划软件、电脑主机、显示器以及控制盒,路径规划软件规划图片采集装置采集图片时的拍摄路径,控制盒接收路径规划软件规划出的拍摄路径并控制图片采集装置沿着拍摄路径运动并采集待识别装备器材的图片,将采集到的图片发送至电脑主机,电脑主机接收待识别装备器材的图片并通过设于其上的装备器材智能识别模型处理,得到待识别装备器材的器材编码和器材名称,并将待识别装备器材的器材编码和器材名称通过显示器显示。该系统及方法可准确及高效地实现装备器材的图像数据采集、装备器材智能识别模型的训练和智能识别,提高了装备器材识别的准确率。
技术特征:1.一种装备器材智能采集识别系统,其特征在于,该系统包括图片采集装置、装备器材智能识别模型、路径规划软件、电脑主机、显示器以及控制盒,电脑主机分别与显示器和控制盒连接,图片采集装置与控制盒连接,装备器材智能识别模型和路径规划软件均设于电脑主机上,其中:
2.如权利要求1所述的装备器材智能采集识别系统,其特征在于,图片采集装置包括转盘组件、机械臂以及设于机械臂顶部末端的图像采集模块,其中,
3.如权利要求2所述的装备器材智能采集识别系统,其特征在于,机械臂包括在三维空间上相互垂直的第一连杆、第二连杆和第三连杆,以及分别位于第一连杆末端且用于驱动第二连杆在水平面上旋转的第一步进电机,位于第二连杆末端且用于驱动第三连杆在垂直平面上旋转的第二步进电机,位于第三连杆末端且用于驱动图像采集模块绕第三连杆轴线旋转的第三步进电机,第一步进电机、第二步进电机、第三步进电机上的线束均与控制盒连接。
4.如权利要求3所述的装备器材智能采集识别系统,其特征在于,图像采集模块包括拍摄模块和第四步进电机,拍摄模块固设于第四步进电机的转轴上,第四步进电机本体固定连接在第三步进电机的转轴上,第四步进电机本体可绕第三步进电机的转轴旋转,第四步进电机上的线束与控制盒连接。
5.如权利要求4所述的装备器材智能采集识别系统,其特征在于,拍摄模块包括摄像头和补光灯,摄像头用于拍摄待识别装备器材的图片,补光灯用于为待识别装备器材拍照时提供照明。
6.如权利要求2所述的装备器材智能采集识别系统,其特征在于,转盘组件包括底座、设于底座上的支撑杆、位于支撑杆上方且与支撑杆固定连接的转盘、固定套设在支撑杆下方且靠近底座一侧的同步带轮、固设于地面的电机支架、安装在电机支架上的第五步进电机以及同步带,第五步进电机通过同步带驱动同步带轮带动转盘转动。
7.一种装备器材智能采集识别方法,采用如权利要求1至6任一项所述的装备器材智能采集识别系统对目标器材进行自动采集并识别,其特征在于,该方法包括如下步骤:
8.如权利要求7所述的装备器材智能采集识别方法,其特征在于,s2具体包括如下步骤:
9.如权利要求7所述的装备器材智能采集识别方法,其特征在于,s3中的装备器材智能识别模型在正式投入使用前还需要进行训练,具体训练过程如下:
10.如权利要求9所述的装备器材智能采集识别方法,其特征在于,s3中的装备器材智能识别模型具体为nanodet深度学习模型。
技术总结本发明公开了一种装备器材智能采集识别系统及方法,包括图片采集装置、装备器材智能识别模型、路径规划软件、电脑主机、显示器以及控制盒,路径规划软件规划采集图片时的拍摄路径并传输至控制盒,控制盒控制图片采集装置按照拍摄路径运动采集待识别装备器材的图片,将采集到的图片发送至电脑主机,电脑主机接收待识别装备器材的图片并通过设于其上的装备器材智能识别模型处理,得到待识别装备器材的器材编码和器材名称,并将待识别装备器材的器材编码和器材名称通过显示器显示。该系统及方法可准确及高效地实现对待识别装备器材的图像采集,提高了装备器材识别的准确率。技术研发人员:董孟高,舒昕浩,周建,李磊,张士刚,罗旭,沈国际,杨拥民受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195078.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表