一种基于极坐标转换的林隙提取方法
- 国知局
- 2024-07-31 23:02:44
本发明涉及林隙提取,具体涉及一种基于极坐标转换的林隙提取方法。
背景技术:
1、林隙通常是指连续的森林冠层由于人为因素(如森林砍伐、森林管理等)或自然因素(如病虫害、雷击、大风等)的干扰而出现断裂,导致森林冠层之间出现空隙的现象。林隙的出现会引发一系列生态效应,包括改变森林的结构和促进林下群落的演替更新。因此,林隙在森林生态学研究中扮演着重要的角色,它被视为描述森林叶面积指数、生物量、碳储量、动物栖息地和局部气候调节等森林参数特征和功能的关键因素,同时也有助于理解这些森林参数特征和功能在空间上的变化。
2、林隙边界形状和林隙面积作为林隙的关键要素,传统的测量方法涉及研究人员进入森林区域,这不仅费时费力,还受到冠层遮挡和复杂的林下条件的干扰,因此难以保证测量结果的准确性。激光雷达遥感技术作为一种新兴的遥感技术,因其可以快速、准确地获得研究对象的高密度三维点云数据备受关注,特别是机载激光雷达技术,采用的是从上而下的扫描方式,能够精准地获取大范围的森林冠层三维点云数据,逐渐成为林隙提取的重要技术手段。
3、目前,利用机载激光雷达提取林隙可分为基于冠层高度模型(canopy heightmodel, chm)和直接基于点云提取两种方法。基于chm方法可以通过林隙与周围树高的差异反映林隙的位置,直接从chm中识别林隙,该方法使用较为普遍。但由于点云数据在生成chm过程中可能引起一定的形变,导致chm产生误差。因此,利用这些方法提取的林隙边界往往呈现较为圆滑的特征,难以准确逼近真实的林隙边界,甚至可能发生偏移,这一情况导致林隙面积的计算精度误差较大。基于点云提取的方法不需要将点云转换成chm,减少了数据转换过程中的误差,提取精度较高。但是目前像这种直接通过冠层点云进行林隙提取的研究较少,因为这种方法精度容易受到点云密度的影响,且在不同森林类型中的适用性难以评估,特别是树冠不明显的树种。因此,直接通过点云来提取林隙的方法仍然面临着参数设置优化困难、林分种类适用性差等方面的问题。
4、综上所述,针对目前林隙提取方法存在林隙边界识别不准确,林隙面积提取精度较低等问题,本发明提出了一种新的林隙提取方法,旨在提高林隙识别以及林隙参数提取的精度,弥补当前方法的不足。
技术实现思路
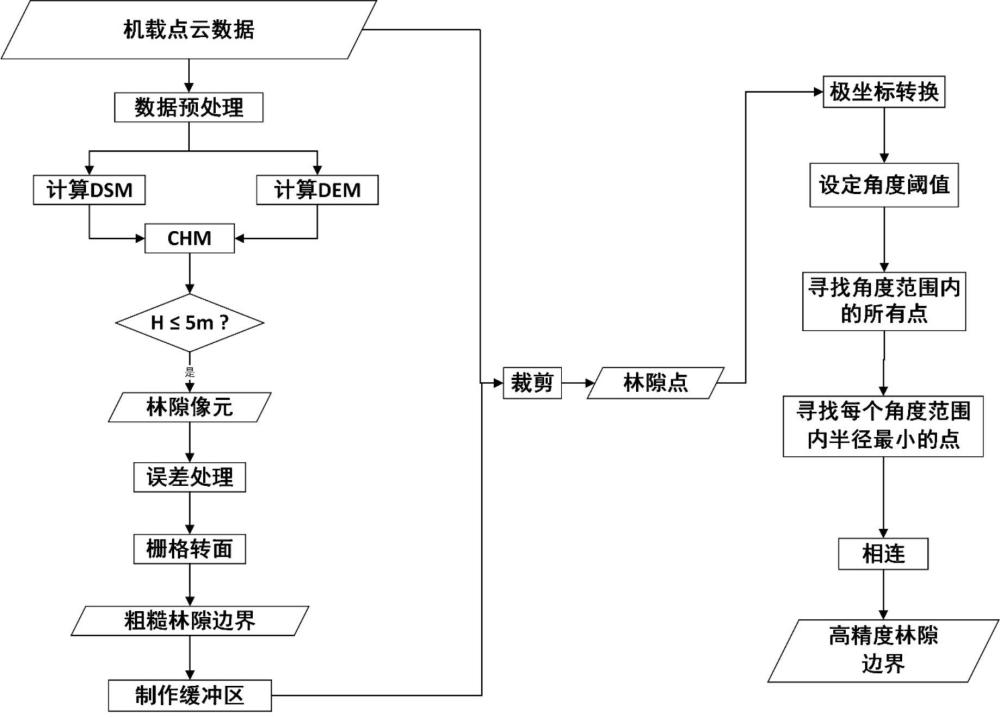
1、本发明的目的在于:针对目前存在的上述问题,提供了一种基于极坐标转换的林隙提取方法,以chm提取的粗糙林隙为基础,然后以粗糙林隙建立缓冲区对原始点云进行裁剪,最后对裁剪出来的林隙点云进行极坐标转换,以固定角度为步长搜索范围内半径最短的点作为林隙点,将这些点相连得到高精度的林隙结果。
2、本发明的技术方案如下:
3、一种基于极坐标转换的林隙提取方法,包括以下步骤:
4、s1:利用数字高程模型dem和数字表面模型dsm生成冠层高度模型chm;
5、s2:基于冠层高度模型chm进行初步林隙识别,获取粗略的林隙范围,根据粗略的林隙范围生成相应的缓冲区,利用生成的缓冲区裁剪原始点云数据,获取准确的林隙点云;
6、s3:对每个林隙点云提取中心点,进行极坐标转换,并按照角度步长和最短半径搜索符合条件的点,并将符合条件的点进行连接,得到高精度的林隙范围;
7、s4:基于最终提取的林隙范围,计算林隙的面积,并计算实际面积进行对比以评估精度。
8、进一步的,所述s3具体包括以下步骤:
9、将得到的林隙点云在平面上进行极坐标转换:
10、根据如下公式找到每个林隙点云的中心点:
11、;
12、其中,、表示第个点的坐标值,表示点的数量;
13、根据得到的中心点,利用林隙点云的坐标剪去中心坐标,将林隙点云中心化,计算公式如下:
14、;
15、;
16、其中,、表示中心化后的坐标值, 、表示每个点的原始坐标值;
17、将中心化后的林隙点云转换为极坐标,计算公式为:
18、;
19、。
20、进一步的,所述s3还包括以下步骤:
21、设置角度步长,按照角度步长将圆周分成不同的角度:
22、;
23、根据分成角度的长度依次进行循环,计算每个点与当前角度的差值;
24、设置角度阈值,找到满足的所有点;
25、找到点中最小的点;
26、循环结束后将满足条件的所有点依次相连得到最终的林隙。
27、进一步的,所述s4具体包括以下步骤:
28、连接顶点:将多边形的相邻顶点两两连接,形成系列的边,计算三角形面积:对于每一对相邻顶点形成的边,构成三角形;
29、计算每个三角形的有向面积,计算公式为:
30、,
31、其中,和是三角形的两个顶点坐标;
32、求和:将所有三角形的有向面积相加,得到多边形的有向面积;
33、取绝对值:取有向面积的绝对值为计算得到的林隙面积。
34、进一步的,所述s2具体包括以下步骤:
35、在arcmap中以五米为高度阈值对chm图像进行二值化处理;
36、在处理中,将高度小于等于五米的像元标记为一,高度大于五米的标记为零;
37、将噪点、独立单木和裁剪边界产生的误差进行处理后,得到初步的林隙识别结果。
38、进一步的,所述s2还包括以下步骤:
39、将初步提取的林隙识别结果与原始点云数据进行叠加;
40、以提取的粗糙林隙边界生成缓冲区,使真实的林隙边界点云包括在缓冲区内;
41、以缓冲区边界对原始点云进行裁剪,逐一得到林隙点云数据。
42、进一步的,所述s1具体包括以下步骤:
43、通过数据去噪、裁剪预处理方式处理数据;
44、通过滤波方法得到地面点和非地面点,基于地面点利用普通克里金法插值生成dem,基于非地面点中的第一次回拨利用反距离权重法插值生成dsm;
45、通过利用dsm和dem做差得到chm,计算公式为:。
46、进一步的,所述林隙的实际面积提取方法步骤为:
47、基于提取出来的林隙,在原始数据中一一找到对应的林隙,并对该林隙进行裁剪;
48、将裁剪出来的林隙点云导入到arcgis中,对最内侧的点进行矢量化,从而计算林隙面积,以此作为真实的林隙面积。
49、与现有的技术相比本发明的有益效果是:
50、1、一种基于极坐标转换的林隙提取方法,以chm提取的粗糙林隙为基础,然后以粗糙林隙建立缓冲区对原始点云进行裁剪,最后对裁剪出来的林隙点云进行极坐标转换,以固定角度为步长搜索范围内半径最短的点作为林隙点,将这些点相连得到高精度的林隙结果;
51、2、一种基于极坐标转换的林隙提取方法,充分利用了chm的优势,同时也顾及了真实的林隙点,本发明提出的方法可实现林隙的高精度提取,该方法可为森林生态研究提供相关理论支持。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195759.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表