一种基于CIM的危险废物企业远程监管方法与流程
- 国知局
- 2024-07-31 23:03:27
本技术涉及城市信息模型,尤其涉及一种基于cim(city informationmodeling,城市信息模型)的危险废物企业远程监管方法。
背景技术:
1、随着工业化进程的加速和经济的快速发展,各类危险废物的产生量急剧上升。这些废物因含有有害化学物质,若未经妥善管理,会对水体、土壤、空气造成严重污染,进而影响人类健康、生态系统平衡乃至生物多样性。因此,有效管理危险废物成为保护环境和公众健康的重要议题。
2、传统处理方法难以满足日益增长的危险废物处理需求,危险废物企业应运而生,专门从事危险废物的收集、运输、储存、处理和最终处置,提供一站式专业化服务,满足了法律法规要求和市场的需求。而危废企业监管单位需要负责危险废物企业的日常监管工作,目前危废企业监管单位的监管模式依赖于人工上门巡查,这种方式在面对数量众多、分布广泛的危险废物企业时,显得效率低下,人力成本高昂。
3、因此,如何提高对危险废物企业的监管效率,成为了一个亟待解决的问题。
4、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术的主要目的在于提供一种基于cim的危险废物企业远程监管方法,旨在解决如何提高对危险废物企业的监管效率的技术问题。
2、为实现上述目的,本技术提出一种基于cim的危险废物企业远程监管方法,所述基于cim的危险废物企业远程监管方法包括:
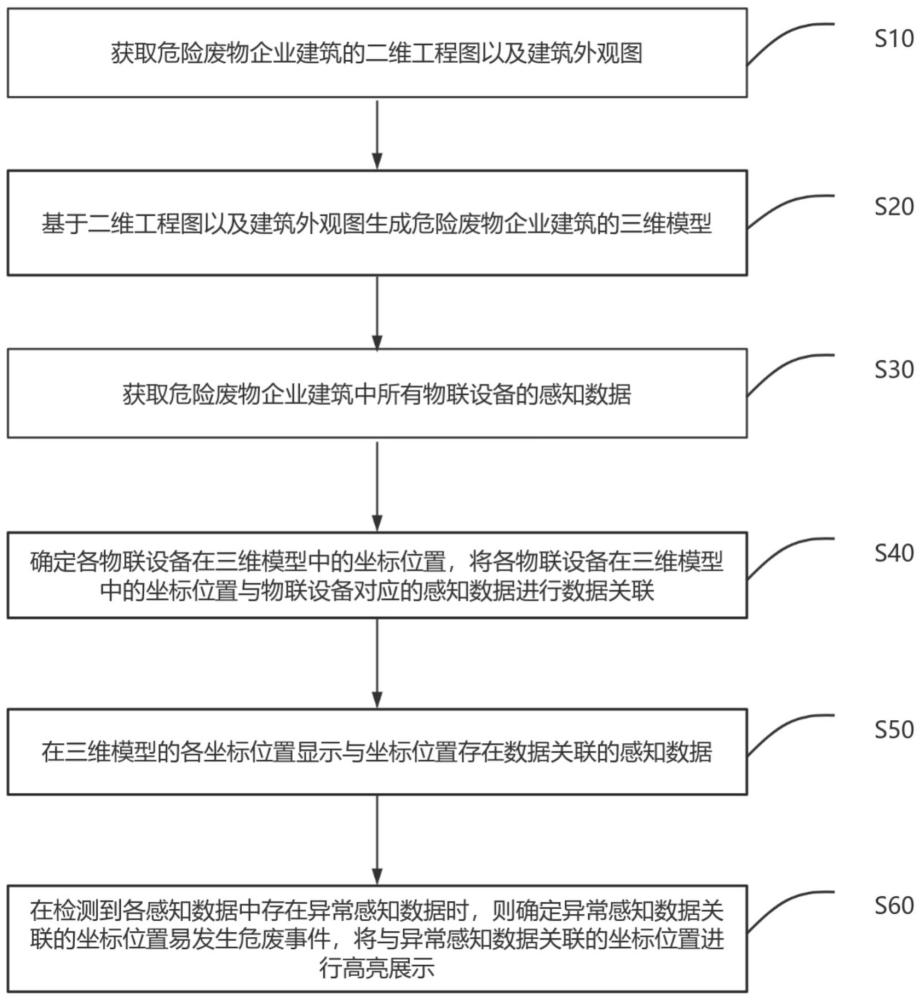
3、获取危险废物企业建筑的二维工程图以及建筑外观图;
4、基于所述二维工程图以及所述建筑外观图生成所述危险废物企业建筑的三维模型;
5、获取所述危险废物企业建筑中所有物联设备的感知数据,其中,所述感知数据是由所述感知设备采集并记录下来的,当前环境中各种状态和事件的信息;
6、确定各所述物联设备在所述三维模型中的坐标位置,将各所述物联设备在所述三维模型中的坐标位置与所述物联设备对应的感知数据进行数据关联;
7、在所述三维模型的各坐标位置显示与所述坐标位置存在数据关联的感知数据;
8、在检测到各所述感知数据中存在异常感知数据时,则确定所述异常感知数据关联的坐标位置易发生危废事件,将与所述异常感知数据关联的坐标位置进行高亮展示。
9、在一实施例中,所述基于所述二维工程图以及所述建筑外观图生成所述危险废物企业建筑的三维模型的步骤,包括:
10、根据所述二维工程图确定所述危险废物企业建筑的所有基础模型,其中,所述二维工程图为cad工程图纸,所述基础模型包括cad工程图纸的设计信息中组成所述危险废物企业建筑的所有基础结构、电子设备、家具和装饰物体;
11、从所述建筑外观图中识别所述危险废物企业建筑中各基础模型的外观特征,其中,所述外观特征包括纹理、颜色和材料;
12、将各所述基础模型的外观特征映射至对应的基础模型在所述三维模型中的坐标位置,生成所述危险废物企业建筑的三维模型。
13、在一实施例中,所述将各所述物联设备在所述三维模型中的坐标位置与所述物联设备对应的感知数据进行数据关联的步骤,包括:
14、获取所有物联设备的设备识别码;
15、获取所述三维模型中各基础模型的模型识别码;
16、将各所述模型识别码与各所述设备识别码进行匹配,确定匹配成功的模型识别码和设备识别码;
17、将匹配成功的模型识别码对应的基础模型与所述设备识别码对应的物联设备进行关联;
18、获取各所述基础模型在所述三维模型中的坐标位置;
19、将各所述基础模型的坐标位置与所述基础模型关联的物联设备的感知数据进行数据关联。
20、在一实施例中,在所述三维模型的各坐标位置显示与所述坐标位置存在数据关联的感知数据的步骤之前,包括:
21、确定城市信息模型平台的基础坐标系与所述三维模型的初始坐标系,其中,所述基础坐标系为大地坐标系,所述初始坐标系为所述三维模型内部设定的坐标系;
22、将所述三维模型的初始坐标系转换为所述城市信息模型平台的基础坐标系;
23、基于所述三维模型的基础坐标系将所述三维模型导入所述城市信息模型平台。
24、在一实施例中,所述三维模型包括多个基础模型和所述基础模型对应的属性信息,所述基于所述基础坐标系将所述三维模型导入所述城市信息模型平台的步骤,包括:
25、将各所述基础模型与各所述基础模型对应的属性信息进行关联,并将各所述基础模型与对应关联的属性信息存入预设数据库;
26、基于所述基础坐标系将各所述基础模型导入所述城市信息模型平台;
27、所述在所述三维模型的各坐标位置显示与所述坐标位置存在数据关联的感知数据的步骤之后,还包括:
28、若接收到所述基础模型的查看指令,则从所述预设数据库中获取与所述基础模型关联的属性信息,并在所述三维模型中加载所述属性信息。
29、在一实施例中,所述感知数据包括视频数据,所述感知数据包括视频数据,所述在所述三维模型的各坐标位置显示与所述坐标位置存在数据关联的感知数据的步骤,包括:
30、根据所述三维模型中各基础模型的坐标位置确定各所述基础模型的表面显示区域,其中,所述表面显示区域为所述基础模型用于显示视频数据的区域;
31、基于各所述基础模型对应的表面显示区域计算各所述视频数据所需的透视变换矩阵;
32、根据所述透视变换矩阵对各所述视频数据进行透视变换,将变换后的视频数据投影至对应基础模型的表面显示区域。
33、在一实施例中,所述基于各所述基础模型对应的表面显示区域计算各所述视频数据所需的透视变换矩阵的步骤,包括:
34、获取所述视频数据的视角参数,其中,所述视角参数包括摄像机的位置、朝向、视野角参数;
35、确定所述表面显示区域的区域边界和表面法线方向;
36、基于所述视频数据的视角参数,所述表面显示区域的区域边界和表面法线方向计算所述视频数据中每一像素点映射到所述基础模型对应表面点的透视变换矩阵。
37、此外,为实现上述目的,本技术还提出一种基于cim的危险废物企业远程监管装置,所述基于cim的危险废物企业远程监管装置包括:
38、图纸模块,用于获取危险废物企业建筑的二维工程图以及建筑外观图;
39、生成模块,用于基于所述二维工程图以及所述建筑外观图生成所述危险废物企业建筑的三维模型;
40、感知模块,用于获取所述危险废物企业建筑中所有物联设备的感知数据,其中,所述感知数据是由所述感知设备采集并记录下来的,当前环境中各种状态和事件的信息;
41、关联模块,用于确定各所述物联设备在所述三维模型中的坐标位置,将各所述物联设备在所述三维模型中的坐标位置与所述物联设备对应的感知数据进行数据关联;
42、展示模块,用于在所述三维模型的各坐标位置显示与所述坐标位置存在数据关联的感知数据;
43、监测模块,用于在检测到各所述感知数据中存在异常感知数据时,则确定所述异常感知数据关联的坐标位置易发生危废事件,将与所述异常感知数据关联的坐标位置进行高亮展示。
44、此外,为实现上述目的,本技术还提出一种基于cim的危险废物企业远程监管设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上文所述的基于cim的危险废物企业远程监管方法的步骤。
45、此外,为实现上述目的,本技术还提出一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的基于cim的危险废物企业远程监管方法的步骤。
46、此外,为实现上述目的,本技术还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现如上文所述的基于cim的危险废物企业远程监管方法的步骤。
47、本技术获取建筑的二维工程图以及建筑外观图获取危险废物企业建筑的二维工程图以及建筑外观图;基于所述二维工程图以及所述建筑外观图生成所述危险废物企业建筑的三维模型,自动识别图纸上的元素并将其转换为三维对象,监管人员可以直观地理解和分析企业内部结构和设备布局;获取所述危险废物企业建筑中所有物联设备的感知数据,其中,所述感知数据是由所述感知设备采集并记录下来的,当前环境中各种状态和事件的信息,为监管系统提供数据支持;确定各所述物联设备在所述三维模型中的坐标位置,将各所述物联设备在所述三维模型中的坐标位置与所述物联设备对应的感知数据进行数据关联,数据关联后,每个设备在虚拟空间中的状态可以通过其感知数据反映出来,使得管理者能够即时掌握企业内环境状态、设备运行情况等信息;在所述三维模型的各坐标位置显示与所述坐标位置存在数据关联的感知数据,监管人员可以直接在模型界面上查看各厂区的实时状态,在检测到各所述感知数据中存在异常感知数据时,则确定所述异常感知数据关联的坐标位置易发生危废事件,将与所述异常感知数据关联的坐标位置进行高亮展示,能够快速聚焦问题区域,能够辅助管理人员做出更加精准、及时的应对措施,减少人为判断的误差和延迟,本技术通过对危险废物企业建筑进行建模,并在模型中同步显示物联设备的感知数据,在数据异常时对异常位置进行标注,能够直接通过该模型对危险废物企业进行监管,无需人工上门进行巡查,提高了对危险废物企业运行情况的监管效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195825.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表