一种仿人体下肢减振馈能悬架及其设计方法与流程
- 国知局
- 2024-07-31 23:10:42
本发明属于车辆悬架,一种仿人体下肢减振馈能悬架及其设计方法。
背景技术:
1、悬架是一种连接车轮和车身的装置,其主要的功能是实现承载车身重量与缓解路面冲击。而目前研究使用的悬架主要有传统被动悬架、半主动悬架与主动悬架。被动悬架由于刚度与阻尼不可调存在着车辆平顺性难以得到保障的缺点,而且受路面颠簸产生的能量往往以热能的方式耗散掉。半主动悬架与主动悬架则通过复杂的机械结构与控制系统实现车辆平顺性。但是依靠复杂的机械结构、繁多的传感元件使得系统能耗大,系统可靠性降低,因此难以实现广泛使用。
2、仿生的思想给解决一些棘手的工程问题提供了新的方案。人体下肢(大腿、小腿、脚掌)是人体重要组成,扮演者支撑和减振两大重要角色。人体上身的重量,需要依靠大腿、小腿和脚掌的骨骼和肌肉的共同作用完成支撑。在运动中需要依赖大腿和小腿之间的转动,小腿和脚掌之间转动,削减人体落地所受的冲击。因此,人体下肢骨骼结构与周围伴随的肌肉具有符合良好悬架的特征。
3、本发明通过模拟人体下肢结构设计了一种减振性能可调节且可以馈能的悬架,并提供了可以使悬架减振性能达到最优的参数评估方法和反映馈能效果的仿真模型。
技术实现思路
1、本发明的目的是提供一种新颖的仿人体下肢结构的减振和馈能悬架,并在此基础之上提供了一种计算悬架垂向减振性能和馈能效果的计算方法。本发明解决的技术问题:克服现阶段传统悬架减振效果不佳,振动产生能量不能有效回收的缺陷。
2、为达到上述目的,解决上述技术问题,本发明的技术方案如下:
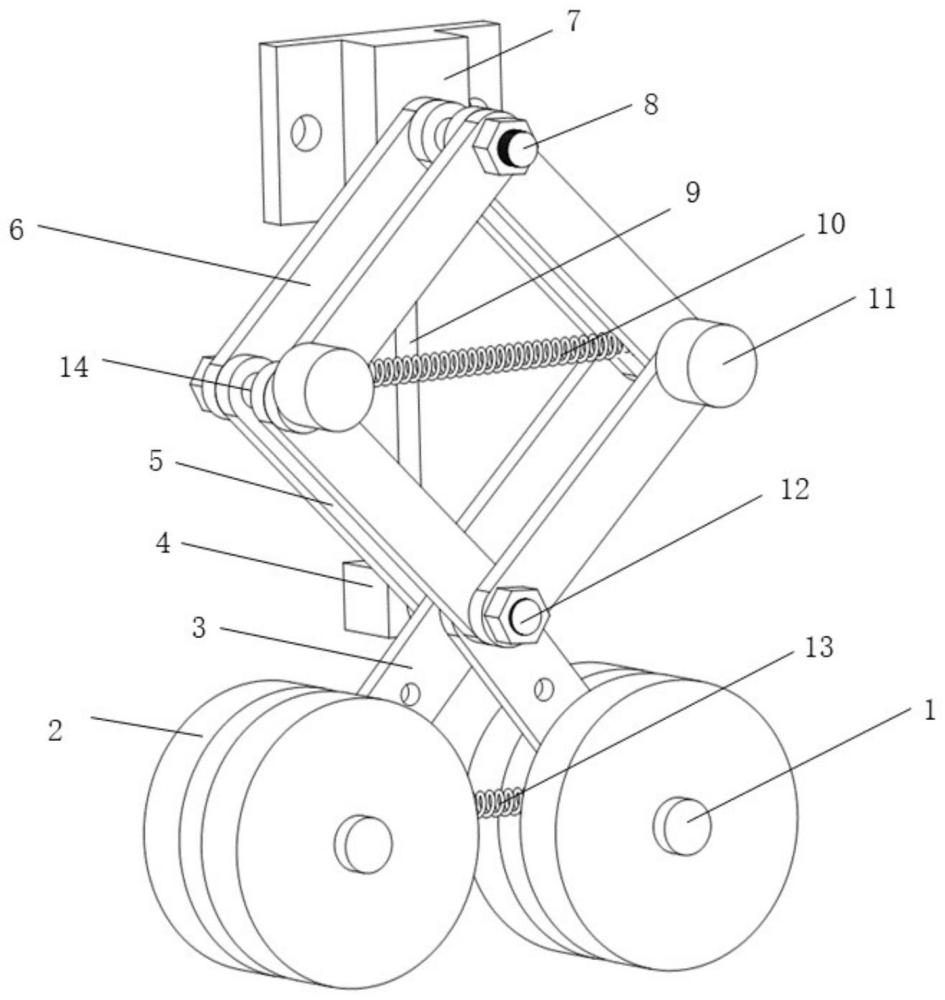
3、一种仿人体下肢减振馈能悬架,包括脚掌连杆、小腿连杆和大腿连杆;小腿连杆与大腿连杆长度比近似1:1,小腿连杆与大腿连杆各一对,用于左右两侧仿人体下肢的连接;本发明根据人体下肢的三段式结构,构造出脚掌连杆、小腿连杆和大腿连杆;模拟小腿与大腿之间近似1:1的比例,将大小腿设计为长度相等的连杆;
4、将脚掌连杆对称布置,脚掌连杆下端与车轮轴安装,脚掌连杆上端与脚跟轴连接;小腿连杆下端与脚跟轴连接,上端与膝关节轴连接;左侧膝关节轴中间开有键槽,左侧小腿连杆和膝关节轴之间通过键连接;左侧大腿连杆安装在小腿连杆外侧;左侧电机转轴与左侧膝关节轴焊接,左侧电机外壳与左侧大腿焊接固定;在左侧小腿连杆和左侧大腿连杆转动时,会带动电机的转动,对于一个外接负载的闭合电路系统,电机向系统输出电磁阻尼力,同时回收能量;
5、右侧小腿连杆安装在左侧小腿连杆外端,一端通过脚跟轴连接,一端与右侧膝关节轴安装;右侧大腿连杆安装在右侧小腿连杆内侧,上端与髋关节轴连接,下端与开有键槽的膝关节轴连接,右侧膝关节轴的转动能带动右侧大腿连杆的转动;右侧电机转轴与右侧膝关节轴焊接连接,右侧电机外壳与右侧小腿连杆焊接;在右侧小腿连杆和右侧大腿连杆相对转动时,带动电机的转动,同时电机向结构输出阻尼力;
6、弹簧1连接左右脚掌连杆下端,提供恢复力;弹簧2连接左右膝关节轴,用于提供恢复力;
7、固定支座两端打孔,通过螺栓连接在车身,中间打孔内攻内螺纹,通过内螺纹与髋关节轴连接;配重块一端与脚跟轴连接,相邻一端将导向杆竖直安装在内,引导脚跟轴受到激励后垂向运动。
8、同时本发明还提供一种计算仿人体下肢减振馈能悬架减震效果的方法,具体包括如下步骤:
9、步骤1、通过仿人体下肢减振馈能悬架运动变化,推导恢复力与阻尼力关系;
10、通过仿人体下肢减振馈能悬架运动变化,推导弹簧1和弹簧2的水平位移以及三角函数关系如下:
11、
12、
13、
14、
15、通过弹簧水平位移与运动时刻的水平角度函数可以得出弹簧1和弹簧2的在运动过程中竖直方向的恢复力和阻尼力:
16、
17、
18、其中x1表示弹簧1水平位移变化量;表示脚掌连杆竖直方向位移量;x2表示弹簧2水平位移变化量;表示大腿连杆和小腿连杆竖直方向相对位移量;fk1为弹簧1竖直方向恢复力;fc1为弹簧1竖直方向阻尼力;fk2为弹簧2竖直方向恢复力;fc2为弹簧2竖直方向阻尼力;l1为脚掌连杆长度;l2为大腿和小腿连杆长度;θ1为初始平衡状态脚掌连杆与水平线夹角;θ2为初始平衡状态小腿连杆与水平线夹角;k1为弹簧1的刚度系数;c1为弹簧1的阻尼系数;k2为弹簧2的刚度系数;c2为弹簧2的阻尼系数;为脚掌连杆转动角度变化量;为小腿连杆转动角度变化量;
19、当电机输入转速时,对于外接负载的闭合电路,会产生感应电动势进而产生感应电流,同时电机产生电磁转矩,在齿轮箱传动比作用下放大,传递给外界系统;
20、有如下e=kewge;tge=kti;单个电机产生转矩在连杆作用下的竖直方向的力为:
21、
22、其中wge为电机内部转子转速;e为感应电动势;i为感应电流;kt为转矩常数;ke为反电动势常数;rin为电机内阻;rex为负载电阻;n为电机传动比;tge为转子电磁阻尼力;ten为经齿轮箱放大后电磁转矩;
23、步骤2、由牛顿第二定律得出动力学方程,并对非线性方程近似处理通过牛顿第二定律得出下列动力学方程:
24、
25、
26、对式中非线性刚度项和阻尼项进行泰勒展开,代入动力学方程并进行无量纲化,得到动力学方程:
27、
28、
29、其中:
30、
31、
32、
33、
34、
35、
36、其中,y1为y1的无量纲位移;y2为y2的无量纲位移;α为刚度比;μ为质量比;ξ1为c1的阻尼比;ξ2为c2的阻尼比;ξ3为c3的阻尼比;为的无量纲表示;为的无量纲表示;ωn为固有频率;ω为频率比;t为无量纲时间;
37、步骤3、推导位移传递率公式,对幅频特性方程编程,得出参数对系统减振效果的影响。
38、对方程设解求值,设z=z0sin(tω)
39、
40、
41、推导出位移传递率公式为
42、
43、同时能得出结构幅频特性方程,在matlab中设置结构初始状态时的参数,对幅频特性方程编程求解,即可得出该参数条件下的幅频特性曲线,判断在不同频率下的减振效果。设置不同参数可得出不同参数下的幅频特性曲线,进一步判断不同参数对结构减振性能的影响,以此得出结构最优减振参数。
44、步骤4、将一定结构参数下仿人体下肢减振馈能悬架实体模型导入adams,设置不同工况,测量膝关节处转速,计算得出馈能效果
45、将结构导入adams软件,对模型进行化简,添加材料,对零件添加运动副,依据具体参数,在adams中添加弹簧1和弹簧2的刚度系数及阻尼系数。将扭簧的阻尼系数等效设置电机的参数。在驱动中添加相应幅值的正弦函数作为位移激励,并设置振动频率。进行仿真后测量提取出膝关节处的转速换算得出转子转速计算出感应电动势e=kewge,通过电压分配定律得出外接负载的电压理论计算得到输出功率在matlab中除以离散点的个数则得出每一工况下的平均输出功率。
46、相对于现有技术,本发明的有益效果是:
47、1、本发明可以通过更换不同刚度的弹簧、调整脚掌连杆、大小腿连杆的初始安装角度、配重块质量等参数实现使系统良好的减振。可以更换不同类型传动比电机与外接负载实现结构阻尼力变化,同时实现振动能量回收。
48、2、本发明可以通过计算得出不同结构参数对悬架隔振性能的影响,从而设计得出悬架最优减振状态的结构参数,以及最佳馈能效果结构参数,为结构优化提供参考。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196250.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。