一种基于智能洗碗机的三维参数化设计方法与流程
- 国知局
- 2024-07-31 23:25:10
本发明涉及数据挖掘,尤其涉及一种基于智能洗碗机的三维参数化设计方法。
背景技术:
1、随着智能家居技术的不断发展,智能洗碗机作为一种高效、便捷的家用电器受到越来越多消费者的青睐。传统洗碗机在设计和生产过程中,通常使用的是二维设计方法,难以充分考虑到洗涤效果和资源利用效率之间的复杂关系。因此,有必要提出一种新的三维参数化设计方法,以满足消费者对洗碗机清洁效果的不断提升需求。
技术实现思路
1、基于此,本发明有必要提供一种基于智能洗碗机的三维参数化设计方法,以解决至少一个上述技术问题。
2、为实现上述目的,一种基于智能洗碗机的三维参数化设计方法,包括以下步骤:
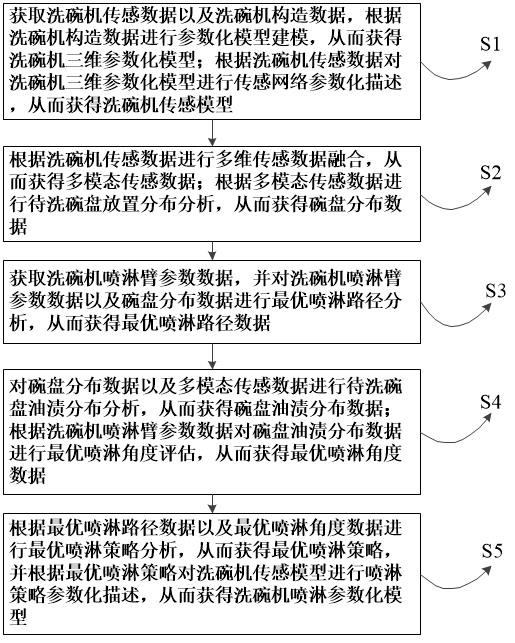
3、步骤s1:获取洗碗机传感数据以及洗碗机构造数据,根据洗碗机构造数据进行参数化模型建模,从而获得洗碗机三维参数化模型;根据洗碗机传感数据对洗碗机三维参数化模型进行传感网络参数化描述,从而获得洗碗机传感模型;
4、步骤s2:根据洗碗机传感数据进行多维传感数据融合,从而获得多模态传感数据;根据多模态传感数据进行待洗碗盘放置分布分析,从而获得碗盘分布数据;
5、步骤s3:获取洗碗机喷淋臂参数数据,并对洗碗机喷淋臂参数数据以及碗盘分布数据进行最优喷淋路径分析,从而获得最优喷淋路径数据;
6、步骤s4:对碗盘分布数据以及多模态传感数据进行待洗碗盘油渍分布分析,从而获得碗盘油渍分布数据;根据洗碗机喷淋臂参数数据对碗盘油渍分布数据进行最优喷淋角度评估,从而获得最优喷淋角度数据;
7、步骤s5:根据最优喷淋路径数据以及最优喷淋角度数据进行最优喷淋策略分析,从而获得最优喷淋策略,并根据最优喷淋策略对洗碗机传感模型进行喷淋策略参数化描述,从而获得洗碗机喷淋参数化模型。
8、本发明获取洗碗机传感数据和洗碗机结构数据,建立了一个三维参数化模型。这样的模型能够更准确地反映洗碗机的实际结构和运行状态,有助于在设计阶段就考虑到洗涤效果和资源利用效率之间的复杂关系。传感网络参数化描述则使得模型能够根据实时的传感数据进行调整,进一步提高了模型的准确性和适应性。利用洗碗机传感数据进行多维传感数据融合,可以获得更全面、更准确的数据信息。通过对待洗碗盘放置分布进行分析,可以了解到洗碗盘在洗碗机内的分布情况,有助于优化洗碗机的布局设计,提高洗碗效率。获取洗碗机喷淋臂参数数据并进行最优喷淋路径分析,可以确定最佳的喷淋路径,从而确保所有洗碗盘都能够充分接受清洗。这样做有助于提高洗碗机的清洁效果,减少洗碗不均匀或遗漏的情况。通过对碗盘分布数据和多模态传感数据的分析,可以了解到碗盘上的油渍分布情况。根据洗碗机喷淋臂参数数据评估最佳喷淋角度,可以确保水流能够充分冲刷油渍,从而提高清洁效果。最优喷淋策略的分析能够根据最佳的喷淋路径和角度,制定出最适合的喷淋方案。通过对洗碗机传感模型进行喷淋策略参数化描述,可以使得洗碗机在运行时根据实时情况调整喷淋策略,进一步提高清洁效果和资源利用效率。
9、可选地,步骤s1具体为:
10、步骤s11:获取洗碗机传感数据以及洗碗机构造数据;
11、步骤s12:对洗碗机构造数据进行拓扑结构分析,从而获得洗碗机拓扑结构数据;
12、步骤s13:基于洗碗机拓扑结构数据构建三维洗碗机模型,并对三维洗碗机模型进行参数化处理,从而获得洗碗机三维参数化模型;
13、步骤s14:根据洗碗机传感数据对洗碗机构造数据进行空间关联,从而获得传感器空间数据;
14、步骤s15:根据传感器空间数据对洗碗机三维参数化模型进行传感网络参数化描述,从而获得洗碗机传感模型。
15、本发明通过获取洗碗机传感数据以及洗碗机构造数据,可以全面了解洗碗机的运行状况和结构特征,为后续设计和优化提供基础数据。通过拓扑结构分析,可以识别洗碗机各组件之间的连接关系和相互作用。有助于建立对洗碗机整体结构的理解,为后续的建模和参数化提供基础。通过构建三维参数化模型,能够更准确地反映洗碗机的实际形态和结构。参数化处理有助于灵活地调整洗碗机的设计参数,提高设计的灵活性和适应性。通过空间关联,可以将传感器数据与洗碗机的实际结构相连接,实现对传感器数据的更准确、实时的解读。有助于提高洗碗机的感知和反应能力。通过传感网络参数化描述,可以将传感器数据与三维参数化模型相结合,建立洗碗机的传感模型。有助于模拟和优化洗碗机在不同工作条件下的性能,提高其智能化水平。
16、可选地,步骤s2具体为:
17、步骤s21:对洗碗机传感数据进行特征提取,从而获得传感特征数据;
18、步骤s22:对传感特征数据进行卡尔曼滤波传感融合,从而获得多模态传感数据;
19、步骤s23:基于洗碗机传感模型构建洗碗机三维图像,并根据多模态传感数据对洗碗机三维图像进行传感特征映射,从而获得洗碗机空间图像;
20、步骤s24:根据洗碗机构造数据对洗碗机空间图像进行承物架区域划分,从而获得承物架区域图像;
21、步骤s25:根据承物架区域图像进行待洗碗盘放置分布分析,从而获得碗盘分布数据。
22、本发明中的洗碗机传感数据包含大量信息,通过特征提取可以从中提取出与洗碗机状态和运行情况相关的关键特征。有助于减少数据的复杂性,提高数据处理的效率和准确性。卡尔曼滤波是一种常用的信号处理技术,可用于融合多个传感器的数据并估计系统状态。通过融合多模态传感数据,可以提高数据的稳定性和准确性,降低噪声干扰,更好地反映洗碗机的实际状态。构建洗碗机三维图像有助于更直观地理解洗碗机的结构和布局。通过将传感特征映射到三维图像上,可以在空间维度上更准确地观察传感数据的分布和变化,从而更好地理解洗碗机的工作状态和性能。通过将洗碗机空间图像划分为承物架区域,可以更清晰地分析洗碗机内部的结构和布局。有助于识别洗碗机内不同区域的功能和特征,为后续的分析和优化提供基础。通过对承物架区域图像进行分析,可以了解洗碗机中待洗碗盘的放置分布情况。有助于优化洗碗机的排布和装载方式,提高洗碗效率和清洗质量。
23、可选地,步骤s25具体为:
24、步骤s251:对承物架区域图像进行承物架图像剔除,从而获得优化区域图像;
25、步骤s252:对优化区域图像进行边缘检测,从而获得图像边缘点数据,并将图像边缘点数据进行相邻边缘点连接,从而获得边缘点连接图像;
26、步骤s253:对边缘点连接图像进行待洗碗盘分类,从而获得待洗碗盘数据;
27、步骤s254:根据待洗碗盘数据以及承物架区域图像进行碗盘放置分布可视化,从而获得碗盘分布数据。
28、本发明中承物架区域图像包含有待洗碗盘和负责装载待洗碗盘的承物架的图像,因此通过剔除承物架图像,可以减少干扰,使得后续的图像处理更加专注于分析待洗碗盘的区域。有助于提高待洗碗盘数据的准确性和分析效率。边缘检测可以帮助提取图像中物体的轮廓信息,从而更清晰地定位待洗碗盘的位置。连接相邻边缘点形成边缘点连接图像有助于消除孤立的边缘点,进一步减少图像中的噪声,使待洗碗盘的轮廓更加连贯和准确。通过对边缘点连接图像进行分类,可以有效地识别和区分待洗碗盘与其他图像中的元素。有助于准确提取待洗碗盘的信息,为后续的分析和可视化提供可靠的数据基础。通过可视化待洗碗盘的放置分布,可以直观地了解碗盘在洗碗机中的位置和分布情况。有助于优化洗碗机的排布方式,提高装载效率,并可能减少洗涤时间。可视化也为用户提供了对洗碗机内部结构和工作状态的直观认识。
29、可选地,步骤s251具体为:
30、对承物架区域图像进行灰度值统计,从而获得图像灰度值数据;
31、根据图像灰度值数据进行高频灰度值统计分析,从而获得高频灰度值数据;
32、根据图像灰度值数据对承物架区域图像进行高频灰度值标记,从而获得高频灰度值标记图像;
33、对高频灰度值标记图像进行相同高频灰度值距离计算,从而获得相同高频灰度值距离数据,并对相同高频灰度值距离数据进行规律性分析,从而获得高频灰度值规律数据;
34、根据高频灰度值规律数据对承物架区域图像进行高频灰度值规律图像剔除,从而获得优化区域图像。
35、本发明通过对承物架区域图像进行灰度值统计,可以了解图像中不同灰度级别的分布情况。有助于识别图像中的主要特征和背景信息,为后续的处理提供基础数据。高频灰度值通常代表图像中的细节和边缘信息。通过对图像灰度值数据进行高频灰度值统计分析,可以确定图像中重要的细节特征,为后续的处理提供关键线索。将图像中的高频灰度值标记出来,可以帮助进一步突出图像中的边缘和细节。有助于提高后续处理的准确性和有效性,特别是在边缘检测和特征提取方面。通过计算高频灰度值的距离并进行规律性分析,可以揭示图像中高频灰度值的分布规律和结构特征。有助于进一步理解图像中的边缘和细节信息,为后续处理提供指导。基于高频灰度值规律数据对图像进行剔除,可以去除图像中不需要的细节或噪声,从而得到更清晰、更准确的优化区域图像。有助于提高图像处理的效率和精度,同时减少后续处理的复杂性。
36、可选地,步骤s253具体为:
37、对边缘点连接图像进行相邻边缘点曲率计算,从而获得相邻边缘点曲率数据;
38、根据相邻边缘点曲率数据进行统计分析,从而获得弯曲曲率阈值以及平坦曲率阈值;
39、根据弯曲曲率阈值对相邻边缘点曲率数据进行分类计算,从而获得高弯曲曲率数据以及低弯曲曲率数据,并根据高弯曲曲率数据以及低弯曲曲率数据对边缘点连接图像分别进行边缘点曲率标记,从而获得高弯曲边缘点标记图像以及低弯曲边缘点标记图像;
40、根据平坦曲率阈值对相邻边缘点曲率数据进行聚类计算,从而获得平坦曲率数据,并根据平坦曲率数据对边缘点连接图像进行边缘点曲率标记,从而获得平坦边缘点标记图像;
41、根据边缘点连接图像对高弯曲边缘点标记图像以及平坦边缘点标记图像进行空间映射,从而获得待洗碗图像,并对待洗碗图像进行特征提取,从而获得待洗碗特征数据;
42、根据边缘点连接图像对低弯曲边缘点标记图像以及平坦边缘点标记图像进行空间映射,从而获得待洗盘图像,并对待洗盘图像进行特征提取,从而获得待洗盘特征数据;
43、将待洗碗特征数据以及待洗盘特征数据进行数据合并,从而获得待洗碗盘数据。
44、本发明通过计算相邻边缘点的曲率,可以量化边缘的弯曲程度。有助于识别图像中的曲线和边缘结构,为后续的分析和处理提供基础数据。通过统计分析相邻边缘点的曲率数据,可以了解边缘的曲率分布情况,并确定弯曲曲率阈值和平坦曲率阈值。有助于区分高曲率的边缘(可能代表物体的轮廓)和低曲率的边缘(可能代表表面的平坦区域)。根据不同的曲率阈值,将图像中的边缘点分为高曲率和低曲率两类,并标记在对应的图像上。有助于突出边缘的重要特征,为后续的特征提取和分析提供准确的边缘信息。通过将高弯曲边缘点标记图像和平坦边缘点标记图像与原始图像进行空间映射,可以得到分别突出高弯曲和平坦区域的图像。然后,对这些图像进行特征提取,有助于捕捉图像中的重要特征,如轮廓、纹理等。将待洗碗特征数据和待洗盘特征数据进行合并,可以综合考虑碗和盘的特征信息,从而更全面地描述待洗碗盘的状态。有助于后续的处理和分析,如自动洗碗机的控制或监测洗涤效果等。
45、可选地,步骤s3具体为:
46、步骤s31:获取洗碗机喷淋臂参数数据;
47、步骤s32:根据洗碗机喷淋臂参数数据进行喷淋范围估计,从而获得喷淋范围数据;
48、步骤s33:根据喷淋范围数据以及碗盘分布数据进行初步路径分析,从而获得初步喷淋路径数据;
49、步骤s34:根据初步喷淋路径数据,并通过洗碗机传感模型对碗盘分布数据以及喷淋范围数据进行喷淋运动模拟,从而获得喷淋运动模拟数据;
50、步骤s35:对频率运动模拟数据进行喷淋效率计算,从而获得喷淋效率数据;
51、步骤s36:根据频率效率数据对初步喷淋路径数据进行最大效率频率路径校正,从而获得最优喷淋路径数据。
52、本发明通过获取洗碗机喷淋臂的参数数据,可以了解喷淋臂的结构和性能特征,为后续的喷淋范围估计和路径分析提供基础数据。根据喷淋臂参数数据,可以估计喷淋范围,即洗碗机能够覆盖的区域。有助于确定洗碗机的清洁范围,为喷淋路径的规划提供依据。结合喷淋范围数据和碗盘分布数据,进行初步路径分析,可以确定洗碗机喷淋的初步路径。有助于了解洗碗机的清洁策略,并为喷淋运动模拟提供初始参数。利用洗碗机传感模型对碗盘分布数据和喷淋范围数据进行喷淋运动模拟,可以模拟出洗碗机在清洁过程中的实际运动情况。有助于评估清洁效果,优化喷淋路径,提高清洁效率。通过对喷淋运动模拟数据进行喷淋效率计算,可以评估洗碗机的喷淋效率。有助于发现潜在的改进点,提高洗碗机的清洁效率和节水效率。根据喷淋效率数据,对初步喷淋路径进行最大效率频率路径校正,可以优化喷淋路径,使其更加高效。有助于减少清洁时间和能源消耗,提高洗碗机的整体性能。
53、可选地,步骤s4具体为:
54、步骤s41:对碗盘分布数据进行空间特征提取,从而获得碗盘分布空间特征数据;
55、步骤s42:根据碗盘分布空间特征数据对多模态传感数据进行空间关联,从而获得碗盘传感数据;
56、步骤s43:对碗盘传感数据进行光学传感特征提取,从而获得碗盘光学传感数据;
57、步骤s44:对碗盘光学传感数据进行光反射度统计,从而获得低频光反射度数据;
58、步骤s45:根据低频光反射度数据对碗盘分布数据进行油渍区域标记,从而获得碗盘油渍分布数据;
59、步骤s46:根据洗碗机喷淋臂参数数据对碗盘油渍分布数据进行最优喷淋角度分析,从而获得最优喷淋角度数据。
60、本发明通过对碗盘分布数据进行空间特征提取,可以捕捉碗盘在洗碗机中的位置和分布情况,为后续分析提供详细的位置信息。通过使用碗盘分布空间特征数据对多模态传感数据进行空间关联,可以将传感数据与碗盘的位置关联起来。有助于获取与碗盘相关的传感信息,为后续的分析提供更全面的数据。对碗盘传感数据进行光学传感特征提取可以捕捉碗盘表面的光学特性,例如表面纹理和反射特征。这为后续的分析提供了更多有关碗盘表面的详细信息。通过对光学传感数据进行光反射度统计,可以获取碗盘表面的光学反射度数据。这为分析提供了有关碗盘表面性质的量化数据,有助于理解碗盘的物理特性。基于低频光反射度数据对碗盘分布数据进行油渍区域标记,有助于检测和标识碗盘表面的油渍区域。这提供了有关污渍分布的重要信息,有助于后续的清洁策略。根据洗碗机喷淋臂参数数据,对碗盘油渍分布数据进行最优喷淋角度分析,可以确定最有效的喷淋角度,以确保洗碗机的喷淋水流能够充分覆盖并清洗碗盘表面的油渍。有助于提高清洁效果,减少残留污垢。
61、可选地,步骤s46具体为:
62、步骤s461:根据洗碗机喷淋臂参数数据进行物理耦合模拟,从而获得喷淋臂物理耦合模拟数据;
63、步骤s462:对碗盘油渍分布数据进行垂直油渍区域划分,从而获得上油渍区域数据以及下油渍区域数据;
64、步骤s463:根据喷淋臂物理耦合模拟数据对上油渍区域数据进行最佳喷淋角度估计,从而获得上区域最佳喷淋角度数据;
65、步骤s464:根据喷淋臂物理耦合模拟数据对上区域最佳喷淋角度数据进行喷淋力度计算,从而获得上区域最佳喷淋力度数据;
66、步骤s465:对碗盘分布数据进行碗盘倾斜度特征提取,从而获得碗盘倾斜度数据,并根据上区域最佳喷淋力度数据对碗盘倾斜度数据进行水流下流重力预测,从而获得上区域水流下流重力数据;
67、步骤s466:根据喷淋臂物理耦合模拟数据对下油渍区域数据进行最佳喷淋角度估计,从而获得下区域第一喷淋角度数据,并根据上区域水流下流重力数据对下区域第一喷淋角度数据进行喷淋角度适应性校正,从而获得下区域最佳喷淋角度数据;
68、步骤s467:将上区域最佳喷淋角度数据以及下区域最佳喷淋角度数据进行数据合并,从而获得最优喷淋角度数据。
69、本发明通过对洗碗机喷淋臂参数数据进行物理耦合模拟,可以模拟洗碗机的喷淋过程,预测喷淋水流的运动轨迹和效果。有助于理解洗碗机的工作原理,为后续的喷淋角度和力度计算提供基础数据。通过对碗盘油渍分布数据进行垂直油渍区域划分,可以将油渍区域分为上部和下部,使系统能够针对不同部位采取不同的清洁策略,提高清洁效果。根据物理耦合模拟数据,对上油渍区域数据进行最佳喷淋角度估计,可以确定最适合清洁上部油渍的喷淋角度,提高清洁效果,并减少水和能源的浪费。基于物理耦合模拟数据,对上区域最佳喷淋角度数据进行喷淋力度计算,可以确定清洁上部油渍所需的喷淋力度。有助于优化喷淋水流的强度,确保足够的清洁力度,同时避免对碗盘表面造成损害。通过提取碗盘倾斜度数据并预测水流下流重力,可以考虑碗盘倾斜对喷淋效果的影响。有助于调整喷淋水流的方向和力度,确保即使在倾斜的情况下也能有效清洁碗盘。通过对上下区域的最佳喷淋角度数据进行合并,有助于综合考虑不同部位的清洁需求,得出整体的最优喷淋角度。有助于确保全面覆盖碗盘表面,提高清洁效果并节约资源。
70、可选地,步骤s5具体为:
71、步骤s51:根据最优喷淋路径数据以及最优喷淋角度数据构建喷淋参数空间;
72、步骤s52:通过洗碗机传感模型对喷淋参数空间进行最优喷淋参数选择,从而获得最优喷淋参数数据;
73、步骤s53:根据最优喷淋参数数据进行喷淋策略分析,从而获得最优喷淋策略;
74、步骤s54:根据最优喷淋策略对洗碗机传感模型进行喷淋策略参数化描述,从而获得洗碗机喷淋参数化模型。
75、本发明通过根据最优喷淋路径数据和最优喷淋角度数据构建喷淋参数空间,可以考虑到不同的喷淋路径和角度对清洁效果的影响。这样的参数空间构建可以提供更多的选择,以便后续的参数优化和选择过程中能够更全面地考虑各种因素。通过洗碗机传感模型对喷淋参数空间进行最优喷淋参数选择,可以根据实时的传感数据和环境情况,动态地选择最适合当前情况的喷淋参数。这种实时优化能够确保在不同的洗碗情景下都能够获得最佳的清洁效果,提高洗碗机的智能程度和适应性。根据最优喷淋参数数据进行喷淋策略分析,可以深入了解不同参数对清洁效果的影响,从而为后续的洗碗机优化提供指导。这种分析能够揭示出喷淋策略的优势和劣势,为进一步的改进提供方向。根据最优喷淋策略,对洗碗机传感模型进行喷淋策略参数化描述,可以将最优的喷淋策略具体化并应用于实际的洗碗机操作中。这种参数化描述能够使洗碗机系统更易于理解和实现,也为未来的改进和优化提供了基础。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197450.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表