一种工业巡检过程的目标物品识别处理方法与流程
- 国知局
- 2024-07-31 23:27:41
本发明涉及工业视频巡检处理领域,尤其涉及一种工业巡检过程的目标物品识别处理方法。
背景技术:
1、随着科技的发展,工业视频图像识别以及应用也在近些年得到了快速发展;工业视频图像识别在很多领域也得到了实际应用,例如仓库管理,物流管理以及码头运输管理等领域;举例说明,现在部分智能码头采用了工业视频图像识别技术;
2、工业视频识别是指利用计算机视觉和图像处理技术对码头场景中的视频进行分析和识别,以实现自动化和智能化的管理和操作。
3、这种技术可以应用于货物装卸、集装箱管理、车辆调度、安全监控等方面,提高码头的效率和安全性。
4、在智能码头的工业视频识别中,常用的技术包括:目标检测和跟踪:通过算法和模型识别视频中的目标物体,如货物、集装箱、车辆等,并跟踪它们的位置和运动轨迹。
5、这可以帮助实现自动化的货物识别和追踪,提高装卸效率和准确性。
6、通过对视频进行分析和理解,提取有用的信息,如集装箱堆放密度、堆场利用率、车辆拥堵情况等。
7、这些信息可以用于优化码头的布局和调度,提高吞吐量和效率。
8、但是进一步的研究发现,现有技术至少存在如下的技术问题;
9、目前采用的常规的图像处理神经网络模型需要大量的样本去训练,在样本数量达不到要求时,无法准确识别并标记目标人物或目标物体;尤其是在工业视频中一直在移动且外形特征显著的特定目标物体,即无人的集装箱运输车(或称无人的集装箱运输平台);同时在行进过程中,图像中的相互之间的集装箱运输车也会有遮挡障碍,从而影响了该目标物体的精确识别,最终影响了码头的无人运输车辆的调度。
技术实现思路
1、本发明的目的在于提供一种工业巡检过程的目标物品识别处理方法,解决了现有技术中指出的上述技术问题。
2、本发明提供了一种工业巡检过程的目标物品识别处理方法,包括如下操作步骤:
3、获取包含目标物体的视频信息;
4、根据所述视频信息获取连续的多张视频帧图像信息;
5、根据各个所述视频帧图像信息中的sift特征信息进行分析识别,获取目标物体图像;
6、根据所述目标物体图像进行标记,得到所述视频信息对应的各视频帧图像的目标物体。
7、较佳的,根据各个所述视频帧图像信息中的sift特征信息进行分析识别,获取目标物体图像,包括如下操作步骤:
8、将所述视频帧图像信息进行灰度化处理,得到灰度帧图像;
9、将所述灰度帧图像进行高斯滤波处理,得到高斯金字塔图像;所述高斯金字塔图像包括多个不同尺度的高斯帧图像;
10、对相邻尺度下的高斯帧图像进行计算高斯差值尺度空间;
11、根据所述高斯差值尺度空间进行检测得到多个极值点;
12、计算获取各个所述极值点的梯度方向与梯度值;
13、根据所述梯度方向及所述梯度值生成帧图像极值点描述符;
14、对各个所述帧图像极值点描述符进行筛选,得到目标帧图像极值点描述符;根据所述目标帧图像极值点描述符与预设的样本目标物体图像的样本目标物体图像极值点描述符进行匹配,得到所述视频帧图像信息中的目标物体图像。
15、较佳的,对各个所述帧图像极值点描述符进行筛选,得到目标帧图像极值点描述符,包括如下操作步骤:
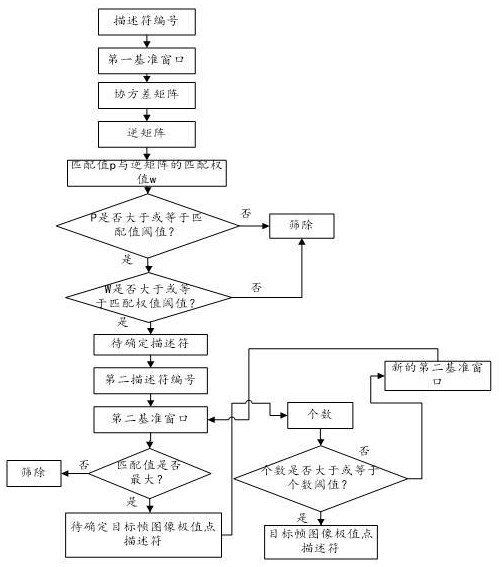
16、将各个所述帧图像极值点描述符进行标号,得到描述符编号n;
17、建立a×b大小的第一基准窗口,以所述第一基准窗口及所述描述符编号对所述视频帧图像信息进行分割,得到多个第一子窗口;基于所述第一子窗口中各个像素点的像素值计算协方差矩阵r';基于所述协方差矩阵计算获取逆矩阵r;所述第一子窗口的中心点为描述符编号对应的帧图像极值点描述符;
18、基于所述逆矩阵r计算获取逆矩阵的匹配值p与逆矩阵的匹配权值w;
19、判断所述匹配值p是否大于或等于预设的匹配值阈值,同时,判断所述匹配权值w是否大于或等于预设的匹配权值阈值;
20、若所述匹配值p大于或等于预设的匹配值阈值的同时所述匹配权值w大于或等于预设的匹配权值阈值,则确定所述描述符编号对应的帧图像极值点描述符为待确定描述符;
21、重复上述操作,直至遍历完所有所述描述符编号,得到多个待确定描述符;
22、对各个所述待确定描述符进行二次甄别处理,在二次甄别处理时,对当前多个待确定描述符设定第二描述符编号;设定多个第二基准窗口a'×b';根据所述第二基准窗口及各个所述第二描述符编号进行筛选得到目标帧图像极值点描述符;
23、较佳的,所述协方差矩阵r'的计算方式为:;
24、式中,hh为:所有第一基准窗口中右上方与左下方像素点的像素值的差值的平方和;
25、gg为,所有第一基准窗口中左上方与右下方像素点的像素值的差值的平方和;
26、hg、gh都为所有第一基准窗口中右上方、左下方像素点的像素值的差值与左上方、右下方像素点的像素值的差值的乘积的和;
27、较佳的,所述第一基准窗口与所述第二基准窗口的大小关系为:a'>a;b'>b。
28、较佳的,所述匹配值p的计算方式为:;
29、所述匹配权重w的计算方式为:;
30、式中,trr为逆矩阵r的迹(矩阵主对角线上元素的和);
31、较佳的,所述逆矩阵的匹配值表征当前帧图像极值点描述符作为目标帧图像极值点描述符的隶属度数值;
32、所述逆矩阵的匹配权重w表征当前帧图像极值点描述符作为目标帧图像极值点描述符的可信度;
33、较佳的,根据所述第二基准窗口及各个所述第二描述符编号进行筛选得到目标帧图像极值点描述符,包括如下操作步骤:
34、根据所述第二基准窗口将当前所述视频帧图像信息进行分割,得到多个第二子窗口;所述第二子窗口中包括多个第二描述符编号;
35、遍历各个所述第二子窗口中的各个所述第二描述符编号,判断所述第二描述符编号对应的匹配值是否最大,若是,则确定所述第二描述符编号对应的待确定描述符为待确定目标帧图像极值点描述符;
36、重复上述操作,得到多个待确定目标帧图像极值点描述符;
37、统计所述待确定目标帧图像极值点描述符的个数z;判断所述待确定目标帧图像极值点描述符的个数z是否大于或等于预设的目标帧图像极值点描述符个数阈值v;若是,则输出各个所述待确定目标帧图像极值点描述符为目标帧图像极值点描述符;
38、若否,则将所述第二基准窗口缩小s比例,得到新的第二基准窗口,基于所述新的第二基准窗口返回上述操作,并得到多个新的待确定目标帧图像极值点描述符,直至所述待确定目标帧图像极值点描述符的个数z大于或等于预设的目标帧图像极值点描述符个数阈值v。
39、较佳的,将所述第二基准窗口缩小s比例,得到新的第二基准窗口,包括如下操作步骤:
40、根据当前各第二子窗口中对应的待确定目标帧图像极值点描述符的匹配值p计算获取匹配值标准差p';
41、根据所述目标帧图像极值点描述符个数阈值v及所述匹配值标准差p'计算获取缩小比例s;
42、所述缩小比例s的计算方式为:;
43、较佳的,将所述第二基准窗口缩小s比例,得到新的第二基准窗口,还包括如下操作步骤:获取当前所述视频帧图像信息各像素点的亮度值;根据所述亮度值生成亮度直方图;根据所述亮度直方图进行分析判断当前所述视频帧图像信息是否存在亮度扭曲;
44、上述亮度扭曲指的是当前视频帧图像信息被光照影响或被阴影遮挡导致的亮度不均匀;
45、若是,则设定初始的缩小比例s',并预设迭代计数器及迭代最大次数阈值;所述迭代计数器的迭代次数初始为0;
46、将所述迭代计数器的迭代初始加一,并基于所述初始的缩小比例s'根据预设的损失函数计算获取缩小比例梯度;
47、基于所述缩小比例梯度及所述初始的缩小比例s'计算获取新的缩小比例s'';
48、所述新的缩小比例s''的计算方式为:;
49、式中,为缩小比例梯度;a为学习率;
50、根据所述新的缩小比例s''获取新的待确定目标帧图像极值点描述符及新的待确定目标帧图像极值点描述符个数;判断所述新的待确定目标帧图像极值点描述符个数是否大于或等于所述新的目标帧图像极值点描述符个数阈值,若是,则返回上述操作,输出目标帧图像极值点描述符;若否,则判断所述迭代计数器的迭代次数是否大于或等于迭代次数最大阈值;若是,则输出当前所述新的缩小比例s'';若否,将所述新的缩小比例作为初始的缩小比例,并返回上述步骤,直至所述新的待确定目标帧图像极值点描述符个数是否大于或等于所述新的目标帧图像极值点描述符个数阈值或所述迭代次数器的迭代次数大于或等于所述迭代次数最大阈值。
51、与现有技术相比,本发明实施例至少存在如下方面的技术优势:
52、分析本发明提供的上述一种工业巡检过程的目标物品识别处理方法可知,在具体应用时,获取包含目标物体的视频信息,为后续的图像识别处理提供输入数据;根据视频信息获取连续的多张视频帧图像信息,对每一帧进行独立的识别处理;根据各个视频帧图像信息中的sift特征信息进行分析识别,获取目标物体图像,通过sift特征信息,提高对于目标物体的检测和匹配效果;在每一帧图像中识别目标物体;根据目标物体图像进行标记,得到视频信息对应的各视频帧图像的目标物体,将识别结果反映到整个视频信息中,使得用户可以在每一帧中了解目标物体的位置和出现情况;从而实现对包含目标物体的视频信息进行准确识别标记,将识别结果反映到整个视频信息中,使得用户可以在每一帧中了解目标物体的位置和出现情况,或在后续的视频信息处理过程中,可以仅针对标记的目标物体图像进行处理,而不用一个个的去识别分析每个视频帧图像,提高视频信息处理效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/197690.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表