一种基于物联网的工厂运输设备避撞方法
- 国知局
- 2024-07-31 23:43:06
本发明是关于工业物联网,特别是关于一种基于物联网的工厂运输设备避撞方法。
背景技术:
1、目前在一些已经建立起工业物联网的工厂中,已经开始使用无人驾驶的运输设备来运输原料,这一套系统尤其针对一些运料路线固定,运料路线障碍物少(障碍物包括人、建筑物、其它设备等)的场景,能够极大的节约工厂生产成本。这些运输设备一般配备有机器视觉系统,从而可以做到紧急情况下的避撞和急停。但是紧急避撞和急停容易造成大面积的运输线路上的拥堵,因此,需要一种能够通过预先规划运输设备运动策略,来避免碰撞的方法。
技术实现思路
1、为实现上述目的,本发明提供了一种基于物联网的工厂运输设备避撞方法,其特征在于,方法包括:
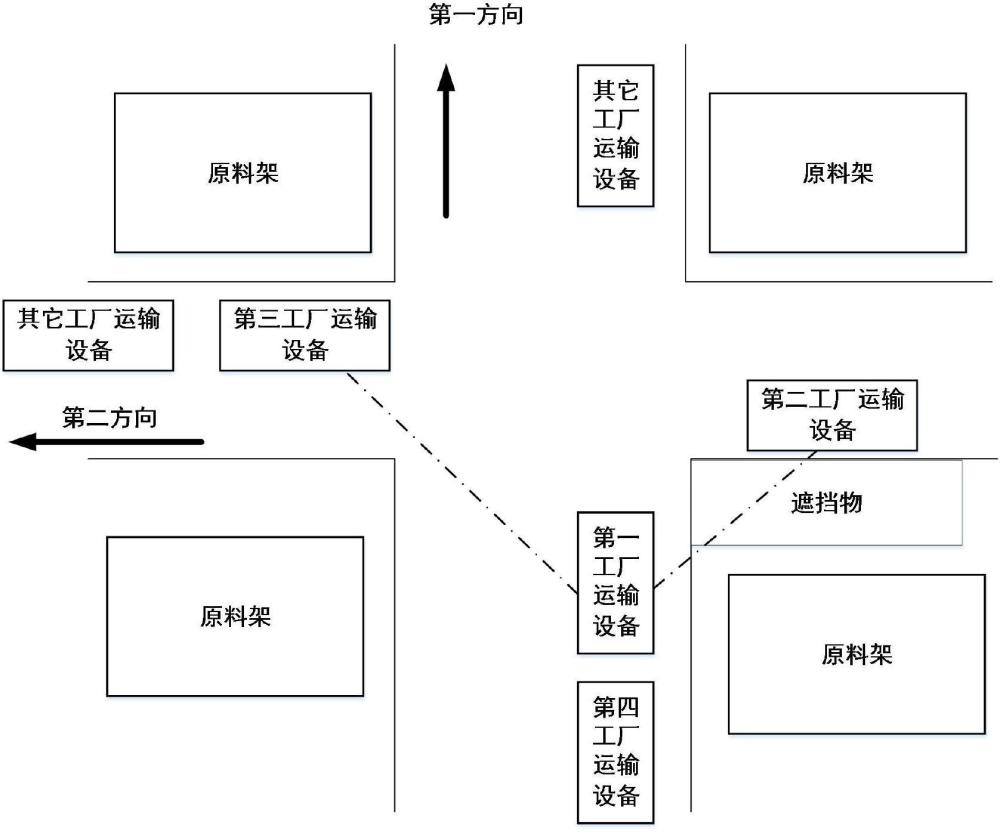
2、由第一工厂运输设备确定在第二方向上运动的第二工厂运输设备的运动信息,其中,第一工厂运输设备在第一方向上运动,其中,第二工厂运输设备的运动信息至少包括第二工厂运输设备的速度和方向,其中,第一工厂运输设备与第二工厂运输设备之间存在遮挡物;
3、由第一工厂运输设备基于第二工厂运输设备的运动信息以及第一工厂运输设备的运动信息来确定第一工厂运输设备与第二工厂运输设备是否将发生碰撞,其中,第一工厂运输设备的运动信息至少包括第一工厂运输设备的速度和方向;
4、在第一工厂运输设备确定第一工厂运输设备与第二工厂运输设备是否将发生碰撞的同时,由第一工厂运输设备向第二工厂运输设备连续发送多次预定义数值序列;
5、由第一工厂运输设备确定从第二工厂运输设备接收到的确认接收信息的数量,其中,确认接收信息是第二工厂运输设备响应于接收到预定义数值序列而发送的;
6、如果第一工厂运输设备确定第一工厂运输设备与第二工厂运输设备将发生碰撞,并且如果第一工厂运输设备确定从第二工厂运输设备接收到的确认接收信息的数量小于门限值,则由第一工厂运输设备向第三工厂运输设备发送停止信息,其中,第三工厂运输设备在第二方向上运动,其中,第一工厂运输设备与第三工厂运输设备之间不存在遮挡物。
7、在一优选的实施方式中,方法还包括:
8、在第三工厂运输设备接收到停止信息之后,由第三工厂运输设备向第二工厂运输设备发送停止信息;
9、在第一工厂运输设备向第三工厂运输设备发送停止信息之后,由第一工厂运输设备向第二工厂运输设备发送停止信息;
10、在第二工厂运输设备接收到停止信息之后,由第二工厂运输设备停止运动。
11、在一优选的实施方式中,方法还包括:
12、在第二工厂运输设备停止运动之后,由第一工厂运输设备确定在第一方向上运动的第四工厂运输设备,其中,第四工厂运输设备在第一方向上位于第一工厂运输设备之后,其中,第四工厂运输设备仅与第一工厂运输设备通信,其中,第一工厂运输设备运输的货物与第四工厂运输设备运输的货物相关联;
13、在第一工厂运输设备确定第四工厂运输设备之后,由第一工厂运输设备基于第四工厂运输设备的运动信息,确定第四工厂运输设备通过碰撞区域的时间,其中,第四工厂运输设备的运动信息至少包括第四工厂运输设备的速度和方向;
14、在第一工厂运输设备确定第四工厂运输设备之后,由第一工厂运输设备向第三工厂运输设备发送继续停止信息,其中,继续停止信息包括第四工厂运输设备通过碰撞区域的时间;
15、在第三工厂运输设备接收到继续停止信息之后,由第三工厂运输设备向第二工厂运输设备发送继续停止信息;
16、在第一工厂运输设备向第三工厂运输设备发送继续停止信息之后,由第一工厂运输设备向第二工厂运输设备发送继续停止信息;
17、在第二工厂运输设备接收到继续停止信息之后,由第二工厂运输设备持续停止运动直到时间经过第四工厂运输设备通过碰撞区域的时间为止。
18、在一优选的实施方式中,方法还包括:
19、如果第一工厂运输设备确定第一工厂运输设备与第二工厂运输设备不发生碰撞,则由第一工厂运输设备基于第二工厂运输设备的运动信息以及第四工厂运输设备的运动信息来确定第二工厂运输设备与第四工厂运输设备是否将发生碰撞;
20、如果第一工厂运输设备确定第二工厂运输设备与第四工厂运输设备将发生碰撞,则由第一工厂运输设备确定提高第四工厂运输设备的速度是否能够避免碰撞;
21、如果第一工厂运输设备确定提高第四工厂运输设备的速度能够避免碰撞,则由第一工厂运输设备以及第四工厂运输设备提升速度。
22、在一优选的实施方式中,方法还包括:
23、如果第一工厂运输设备确定提高第四工厂运输设备的速度不能够避免碰撞,则由第一工厂运输设备确定提高第四工厂运输设备的速度的同时降低第二工厂运输设备的速度是否能够避免碰撞;
24、如果第一工厂运输设备确定提高第四工厂运输设备的速度的同时降低第二工厂运输设备的速度能够避免碰撞,则由第一工厂运输设备向第三工厂运输设备发送减速信息;
25、在第三工厂运输设备接收到减速信息之后,由第三工厂运输设备向第二工厂运输设备发送减速信息;
26、在第一工厂运输设备向第三工厂运输设备发送减速信息之后,由第一工厂运输设备向第二工厂运输设备发送减速信息;
27、在第二工厂运输设备接收到减速信息之后,由第二工厂运输设备降低第二工厂运输设备的速度;
28、由第一工厂运输设备以及第四工厂运输设备提升速度。
29、在一优选的实施方式中,方法还包括:
30、如果第一工厂运输设备确定提高第四工厂运输设备的速度的同时降低第二工厂运输设备的速度不能够避免碰撞,则由第一工厂运输设备向第三工厂运输设备发送第二停止信息,其中,第二停止信息包括第四工厂运输设备通过碰撞区域的时间,以及第二工厂运输设备停止运动的时间;
31、在第三工厂运输设备接收到第二停止信息之后,由第三工厂运输设备向第二工厂运输设备发送第二停止信息;
32、在第一工厂运输设备向第三工厂运输设备发送第二停止信息之后,由第一工厂运输设备向第二工厂运输设备发送第二停止信息;
33、在第二工厂运输设备接收到第二停止信息之后,由第二工厂运输设备在第二工厂运输设备停止运动的时间停止运动,并在第四工厂运输设备通过碰撞区域的时间之后恢复运动。
34、本发明提供了一种基于物联网的工厂运输设备避撞装置,其特征在于,装置包括用于进行以下操作的模块:
35、由第一工厂运输设备确定在第二方向上运动的第二工厂运输设备的运动信息,其中,第一工厂运输设备在第一方向上运动,其中,第二工厂运输设备的运动信息至少包括第二工厂运输设备的速度和方向,其中,第一工厂运输设备与第二工厂运输设备之间存在遮挡物;
36、由第一工厂运输设备基于第二工厂运输设备的运动信息以及第一工厂运输设备的运动信息来确定第一工厂运输设备与第二工厂运输设备是否将发生碰撞,其中,第一工厂运输设备的运动信息至少包括第一工厂运输设备的速度和方向;
37、在第一工厂运输设备确定第一工厂运输设备与第二工厂运输设备是否将发生碰撞的同时,由第一工厂运输设备向第二工厂运输设备连续发送多次预定义数值序列;
38、由第一工厂运输设备确定从第二工厂运输设备接收到的确认接收信息的数量,其中,确认接收信息是第二工厂运输设备响应于接收到预定义数值序列而发送的;
39、如果第一工厂运输设备确定第一工厂运输设备与第二工厂运输设备将发生碰撞,并且如果第一工厂运输设备确定从第二工厂运输设备接收到的确认接收信息的数量小于门限值,则由第一工厂运输设备向第三工厂运输设备发送停止信息,其中,第三工厂运输设备在第二方向上运动,其中,第一工厂运输设备与第三工厂运输设备之间不存在遮挡物。
40、在一优选的实施方式中,装置还包括用于进行以下操作的模块:
41、在第三工厂运输设备接收到停止信息之后,由第三工厂运输设备向第二工厂运输设备发送停止信息;
42、在第一工厂运输设备向第三工厂运输设备发送停止信息之后,由第一工厂运输设备向第二工厂运输设备发送停止信息;
43、在第二工厂运输设备接收到停止信息之后,由第二工厂运输设备停止运动。
44、在一优选的实施方式中,装置还包括用于进行以下操作的模块:
45、在第二工厂运输设备停止运动之后,由第一工厂运输设备确定在第一方向上运动的第四工厂运输设备,其中,第四工厂运输设备在第一方向上位于第一工厂运输设备之后,其中,第四工厂运输设备仅与第一工厂运输设备通信,其中,第一工厂运输设备运输的货物与第四工厂运输设备运输的货物相关联;
46、在第一工厂运输设备确定第四工厂运输设备之后,由第一工厂运输设备基于第四工厂运输设备的运动信息,确定第四工厂运输设备通过碰撞区域的时间,其中,第四工厂运输设备的运动信息至少包括第四工厂运输设备的速度和方向;
47、在第一工厂运输设备确定第四工厂运输设备之后,由第一工厂运输设备向第三工厂运输设备发送继续停止信息,其中,继续停止信息包括第四工厂运输设备通过碰撞区域的时间;
48、在第三工厂运输设备接收到继续停止信息之后,由第三工厂运输设备向第二工厂运输设备发送继续停止信息;
49、在第一工厂运输设备向第三工厂运输设备发送继续停止信息之后,由第一工厂运输设备向第二工厂运输设备发送继续停止信息;
50、在第二工厂运输设备接收到继续停止信息之后,由第二工厂运输设备持续停止运动直到时间经过第四工厂运输设备通过碰撞区域的时间为止。
51、在一优选的实施方式中,装置还包括用于进行以下操作的模块:
52、如果第一工厂运输设备确定第一工厂运输设备与第二工厂运输设备不发生碰撞,则由第一工厂运输设备基于第二工厂运输设备的运动信息以及第四工厂运输设备的运动信息来确定第二工厂运输设备与第四工厂运输设备是否将发生碰撞;
53、如果第一工厂运输设备确定第二工厂运输设备与第四工厂运输设备将发生碰撞,则由第一工厂运输设备确定提高第四工厂运输设备的速度是否能够避免碰撞;
54、如果第一工厂运输设备确定提高第四工厂运输设备的速度能够避免碰撞,则由第一工厂运输设备以及第四工厂运输设备提升速度。
55、与现有技术相比,本发明具有如下优点,目前的工厂运输设备一般配备有机器视觉系统,从而可以做到紧急情况下的避撞和急停。但是紧急避撞和急停容易造成大面积的运输线路上的拥堵,因此,需要一种能够通过预先规划运输设备运动策略,来避免碰撞的方法。本发明提出了一种通过预先规划运输设备运动策略,来避免碰撞的方法。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198247.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表