一种FPGA实现凸轮控制的方法与流程
- 国知局
- 2024-07-31 23:46:45
本发明涉及自动化控制,具体涉及一种fpga实现凸轮控制的方法。
背景技术:
1、往采用机械凸轮,用传感器检测凸轮的位置,从而输出信号。这种方法机械凸轮调整困难,不能在设备运行时修改凸轮位置。传感器信号会有延迟并且不能进行高速时机械延迟补偿。而且机械凸轮在设计完成后,其从动件的动作即被确定,若要改变动作规律必须重新设计安装凸轮。此外,机械凸轮的数量也受到机器尺寸及复杂程度的限制。如果要求在进行多工位机械传动的同时,还要在相应的位置驱动执行元件产生动作并进行监控,比如我们要求机器在高速运转过程中,每当它转过某一角度时,既要使相应的机械结构要按预定的运动规律产生动作,同时还要驱动若干气缸动作,而且在从这一角度开始的某个区间内还要检测某个光电开关的信号是否存在,这样的功能单靠机械凸轮来实现将非常困难甚至根本无法实现。
技术实现思路
1、本发明的目的是提供一种fpga实现凸轮控制的方法,以解决现有技术中的上述不足之处。
2、为了实现上述目的,本发明提供如下技术方案:一种fpga实现凸轮控制的方法,包括以下步骤:
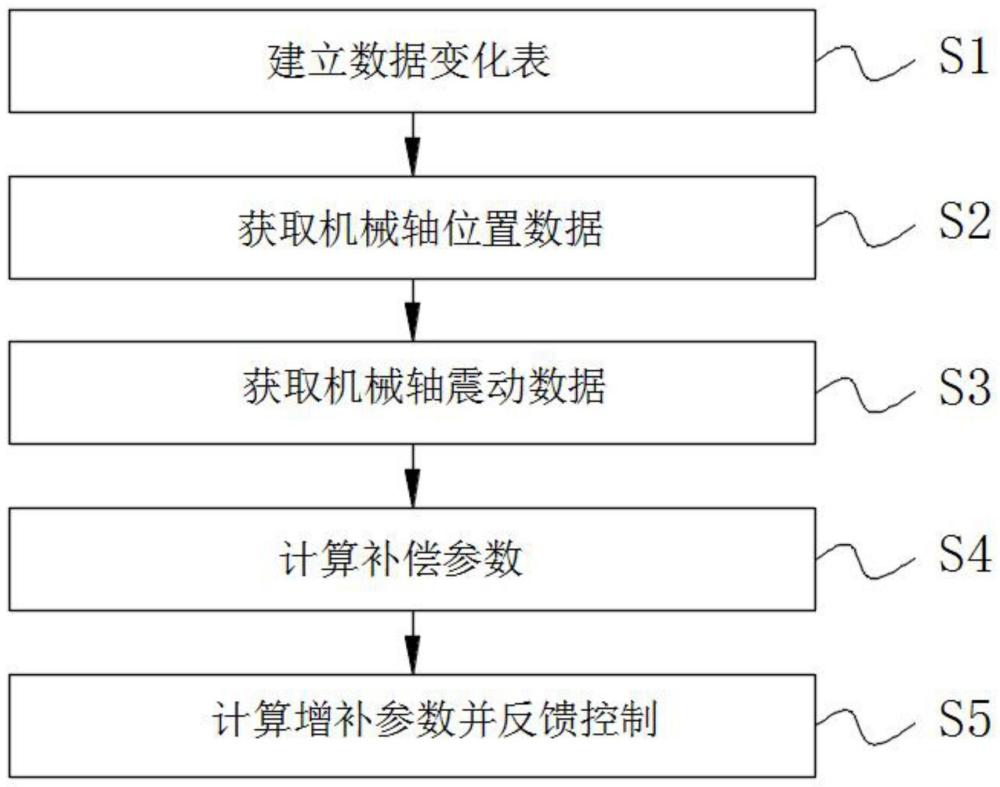
3、s1、可编程逻辑控制器的中央处理单元的fpga模块对凸轮控制器机械轴的转动位置信息以及对应位置的振动数据进行整合,以机械轴转动一周为周期,建立对应机械轴转动位置和振动状态的数据变化表;
4、s2、通过可编程逻辑控制器的中央处理单元实时获取凸轮控制器机械轴位置信息,并通过中央处理单元控制的fpga模块将获得的位置信息编码成位置数据信号,获得机械轴的当前位置数据,并计算出机械轴的当前转速;
5、s3、通过振动传感器实时获取凸轮控制器机械轴的振动信息,由于凸轮结构质地不均,因此在凸轮跟随机械轴同步转动时,机械轴运动产生的振动幅度也不一样,且跟随机械轴的转动呈周期性变化,并通过中央处理单元控制的fpga模块将获得的振动信息编码成振动数据信号,获取当前机械轴振动信息,并记录机械轴振动信息变化数据;
6、s4、基于机械轴的当前转速以及当前振动信息和建立对应机械轴转动位置和振动状态的数据变化表实时比对,以确定补偿参数;
7、s5、根据当前机械轴转速,计算信息传输导致延迟的增补参数,中央处理单元将系统控制参数整合补偿参数和增补参数,再将参数统一反馈给凸轮控制器,控制机械轴运动至下一节点。
8、优选的,步骤s2和s3中通过采用1024/2048线abz三相的增量型编码器对机械轴的位置信息和振动信息进行编码。
9、优选的,步骤s4中的补偿参数由建立的数据变化表对应中央处理单元实时获取的数据对比后的到的差值,并将该差值作为参数补偿,实时反馈,修正机械轴的运动。
10、优选的,步骤s5中的增补数据由当前机械轴的转速确定,在确定对应的补偿参数后,根据系统信息反馈的延迟时间与当前转速,计算因延迟所导致机械轴在收到反馈信息时的位置差,并将此段差距中所导致的数据差作为增补数据连同补偿数据一同反馈。
11、优选的,中央处理单元还包括物理主轴整形单元,该物理主轴整形单元通过对输入的主轴传感器信号进行整形来获得物理主轴脉冲信号;中央处理单元根据物理主轴脉冲信号获取主轴当前位置。
12、优选的,中央处理单元还包括双口ram单元,步骤s1中建立的数据变化表存储于双口ram单元中。。
13、在上述技术方案中,本发明提供的技术效果和优点:
14、本发明通过建立对应机械轴转动位置和振动状态的数据变化表;并实时获取机械轴位置信息、转速和振动信息,从而使其和建立对应机械轴转动位置和振动状态的数据变化表实时比对,以确定补偿参数,并根据当前机械轴转速,计算信息传输导致延迟的增补参数,再将参数统一反馈给凸轮控制器,控制机械轴运动至下一节点,从而提高对凸轮控制器的实时控制精度,保证凸轮控制器的运行安全与稳定,而通过fpga模块对数据的获取和处理并据此控制从轴动作,不仅节省了可编程逻辑控制器的资源,而且大大提高了电子凸轮的控制精度。
技术特征:1.一种fpga实现凸轮控制的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种fpga实现凸轮控制的方法,其特征在于:所述步骤s2和s3中通过采用1024/2048线abz三相的增量型编码器对机械轴的位置信息和振动信息进行编码。
3.根据权利要求1所述的一种fpga实现凸轮控制的方法,其特征在于:所述步骤s5中的增补数据由当前机械轴的转速确定,在确定对应的补偿参数后,根据系统信息反馈的延迟时间与当前转速,计算因延迟所导致机械轴在收到反馈信息时的位置差,并将此段差距中所导致的数据差作为增补数据连同补偿数据一同反馈。
4.根据权利要求1所述的一种fpga实现凸轮控制的方法,其特征在于:所述中央处理单元还包括物理主轴整形单元,该物理主轴整形单元通过对输入的主轴传感器信号进行整形来获得物理主轴脉冲信号;所述中央处理单元根据物理主轴脉冲信号获取主轴当前位置。
5.根据权利要求1所述的一种fpga实现凸轮控制的方法,其特征在于:所述中央处理单元还包括双口ram单元,所述步骤s1中建立的数据变化表存储于双口ram单元中。
技术总结本发明公开了一种FPGA实现凸轮控制的方法,涉及自动化控制技术领域,包括以建立对应机械轴转动位置和振动状态的数据变化表;获得机械轴的当前位置数据,获取当前机械轴振动信息,实时比对,以确定补偿参数;根据当前机械轴转速,计算信息传输导致延迟的增补参数。本发明通过实时获取机械轴位置信息、转速和振动信息,从而使其和建立对应机械轴转动位置和振动状态的数据变化表实时比对,以确定补偿参数,并根据当前机械轴转速,计算信息传输导致延迟的增补参数,再将参数统一反馈给凸轮控制器,控制机械轴运动至下一节点,从而提高对凸轮控制器的实时控制精度,保证凸轮控制器的运行安全与稳定大大提高了电子凸轮的控制精度。技术研发人员:彭福嗣受保护的技术使用者:深圳市太控科技有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240730/198468.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表