一种用于微藻生长的pH自动调控器控制优化方法
- 国知局
- 2024-07-31 23:46:39
本发明属于ph自动调控,尤其是涉及一种用于微藻生长的ph自动调控器控制优化方法。
背景技术:
1、微藻通过光合作用利用co2进行生长,通入适量co2能够提供微藻生长所需的碳源,增加培养基中的碳浓度,可以促进微藻的光合作用,提高其生物量和目标产品产量;微藻中的1,5-二磷酸核酮糖羧化酶(rubisco)能够催化co2与1,5-二磷酸核酮糖(rubp)反应,形成有机物,这一过程依赖于co2浓缩机制(ccm)。ccm能够高效地将环境中的co2浓缩和固定,提高光合作用的效率。在培养微藻时,通常会先将co2通入水中,这样可以减少气体通入时产生的湍流对微藻的干扰,从而更加精确地控制co2的溶解量,同时利用水作为介质来平衡和缓冲藻液ph的变化。
2、当co2溶解在水中时,会形成碳酸,进而分解产生碳酸氢根和氢离子,导致水的ph值下降,即变酸。通入量过多时,藻液ph值过低,可能会抑制微藻中重要的碳固定酶如羧化酶rubisco的活性,进而影响微藻的光合作用效率和生长状态。此外,ph值过低还可能影响藻细胞中其他酶的活性,进而影响藻细胞的代谢途径。通入量过少时,可能无法满足微藻对co2的需求,从而限制了光合作用的效率,进一步影响微藻的生长和生物量的产生。
3、因此,通入co2对维持微藻生长至关重要,需要精准控制其通入量,以确保微藻光合作用的高效进行,同时保持藻液ph值在适宜微藻生长的范围内,避免因ph值变化过大而对微藻的生长造成负面影响。综上,ph自动调控器的反馈控制系统通过实时监测和调整ph值和co2供应,结合微藻的生长特性和最优化的培养条件,实现对通入气体中co2浓度和流量的精确调节。
4、ph自动调控器的反馈控制系统通过实时监测和调整ph值,结合微藻的生长特性和最优化的培养条件,实现对通入气体中co2浓度和流量的调节;为了提高ph自动调控器的控制精度,目前的ph自动调控器的控制技术大多采用pid控制方法, 但是传统pid控制方法在实际的ph监测控制中,存在着许多干扰因素,如温度、压力、流量等的变化,这些因素会对ph值产生影响,使得pid控制器的控制效果受到干扰。
5、狐狸优化算法(fox)一种新的自然启发优化器,该算法是模拟测量狐狸和猎物之间的距离来执行有效的跳跃捕食。在介绍了fox的数学模型和算法后,将fox算法与蜻蜓优化算法(da)、粒子群优化(pso)、适应度相关优化器(fdo)、灰狼优化(gwo)、鲸鱼优化算法(woa)、黑猩猩优化算法(choa)、蝴蝶优化算法(boa)和遗传算法(ga)进行了比较,结果表明,fox算法的局部开发性能优于上述算法,但是算法在寻优速度上较慢,全局搜索性能较差,且存在陷入局部最优后不易跳出的问题。
技术实现思路
1、基于背景技术中存在的上述问题,本发明所要解决的问题是:提供一种用于微藻生长的ph自动调控器控制优化方法,提高ph自动调控器中pid控制器的性能,从而提高ph自动调控器对微藻生长环境ph值的控制,保证微藻的健康生长。
2、本发明解决其技术问题所采用的技术方案是:一种用于微藻生长的ph自动调控器控制优化方法,通过改进狐狸优化算法(fox),利用改进后的狐狸优化算法(ifox)整定ph自动调控器的pid控制器的参数,得到ifox-pid控制器,提高ph自动调控器对二氧化碳(co2)释放量的控制精度,从而精确控制环境ph值,具体步骤如下:
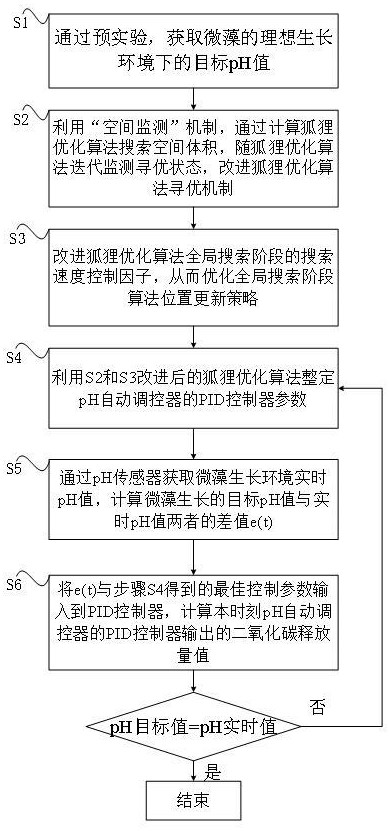
3、s1、通过预实验,获取微藻的理想生长环境下的目标ph值。
4、s2、提出一种“空间监测”机制,通过计算搜索空间体积,随狐狸优化算法迭代监测寻优状态,改进狐狸优化算法寻优机制。
5、s3、引入搜索步长因子改进狐狸优化算法全局搜索阶段的搜索速度控制因子,从而优化全局搜索阶段算法位置更新策略。
6、s4、利用s2和s3改进后的狐狸优化算法整定ph自动调控器的pid控制器的比例参数kp、积分参数ki和微分参数kd,得到最佳pid控制参数。
7、s5、通过ph传感器获取微藻生长环境实时ph值,计算微藻生长的目标ph值与实时ph值两者的差值。
8、s6、将与步骤s4得到的最佳控制参数输入到pid控制器,计算本时刻ph自动调控器的pid控制器输出的二氧化碳释放量值,返回执行步骤s4,不断循环,实现ph自动调控器对二氧化碳释放量的控制的优化。
9、优选地,步骤s1中,获取微藻的理想生长环境下的目标ph值,具体实验步骤为:
10、s11、根据研究需要选择适合的微藻种类,按照微藻的生长需求配制足够的培养基;
11、s12、设置7个ph梯度,覆盖微藻最佳生长ph范围,每个ph组别设定三个重复,使用对微藻生长无影响的酸或碱溶液将每个实验组的培养基ph值调至设定值;
12、s13、在无菌条件下,将预先培养的微藻接种到型号相同的培养瓶中,并保证每个瓶子的接种量相同,将所有培养瓶放置在温室或光照培养箱中,设置相同的光照强度、温度和co2供应量,以确保ph是影响微藻生长的唯一变量;
13、s14、根据微藻的生长速率、生物量增长、叶绿素含量等数据评估每个ph值下的生长条件;通过实验可以得到特定微藻在不同ph条件下的生长曲线,从而确定最适ph值。
14、优选地,步骤s2中,“空间监测”机制的具体设计为:
15、s21、首先,计算整个狐狸搜索空间的体积,数学模型如式(1):
16、(1);
17、式中,为当前迭代算法寻优前的搜索空间体积,为目标函数的问题维度,为第j维的最大位置,为第j维的最小位置;
18、s22、然后,计算当前迭代解的体积,数学模型如式(2);
19、(2);
20、式中,为当前迭代算法寻优后的解位置的体积,为狐狸优化算法种群总规模,为第i个狐狸第j维的最大搜索体积,为第i个狐狸第j维的最小搜索体积;
21、s23、最后,计算搜索空间的探索比率,数学模型如式(3);当探索比率持续两次迭代满足时,表示算法陷入局部最优;
22、(3)。
23、优选地,“空间监测”机制用于狐狸优化算法在全局搜索阶段和局部开发阶段的位置更新后,在重新一轮迭代寻优时,通过计算算法搜索空间体积,随狐狸优化算法迭代监测寻优状态,当算法陷入局部最优时,及时发现并通过随机扰动跳出局部最优解。
24、优选地,为了平衡狐狸优化算法的全局搜索和局部开发阶段,本发明通过一个能量因子与搜索速度控制因子对狐狸优化算法改进;能量因子采用随机选择的方法执行算法的全局搜索或者局部开发;搜索速度控制因子改进后,可以保证在迭代前期保持较大值,便于狐狸优化算法全局搜索,在迭代后期保持较小值,便于狐狸优化算法寻优收敛。
25、优选地,所述步骤s3,改进后的搜索速度控制因子的数学模型公式为:
26、{a}^{,}=γ\times \left [ {cos\left ( {π\times \frac {it} {t}} \right )+β} \right ];
27、式中,在改进后的搜索速度控制因子的变化范围内取值,取值为0.5,为当前迭代次数,为狐狸优化算法最大迭代次数,为搜索步长因子,公式为:
28、;
29、式中,为当前迭代最小适应度值,为当前次迭代第个狐狸个体位置的适应度值,为狐狸优化算法种群总规模。
30、优选地,步骤s4中,改进狐狸优化算法整定ph自动调控器的pid控制器参数,通过目标函数反应ph自动调控器的pid控制器参数整定效果,模拟测量狐狸和猎物之间的距离来执行有效的跳跃捕食,建立狐狸种群的位置更新数学模型,将狐狸个体的位置与ph自动调控器的pid控制器参数值建立实数映射关系,随狐狸优化算法的位置变化,更新ph自动调控器的pid控制器参数值;具体步骤为:
31、s41、用误差平方与调控时间的平方的和的积分设计目标函数;
32、s42、初始化改进狐狸优化算法的参数以及狐狸种群初始位置,其中,狐狸种群初始位置即为ph自动调控器的pid控制器的kp、ki、kd参数解集初始解;
33、s43、将ph自动调控器的pid控制器的kp、ki、kd参数通过二进制编码为改进狐狸优化算法的狐狸个体位置;
34、s44、模拟狐狸捕食猎物和搜索猎物的行为,建立位置更新数学模型,更新ph自动调控器的pid控制器参数值;
35、s45、利用“空间监测”机制,监测改进狐狸优化算法是否陷入局部最优,若机制中的公式(3)搜索空间的探索比率满足,则说明狐狸优化算法陷入局部最优,利用柯西变异扰动策略更新狐狸种群跳出局部最优,否则结束“空间监测”机制;
36、s46、利用目标函数计算每个狐狸个体位置的适应度值,保留最小适应度值,并与上次迭代的最小适应度值比较,保留较小的适应度值对应的狐狸个体位置;
37、s47、当前迭代次数加1后,判断是否成立,若是,则输出最优适应度值对应的狐狸个体位置并解析成ph自动调控器的pid控制器的kp、ki、kd参数解;否则,返回执行s43。
38、优选地,模拟测量狐狸和猎物之间的距离来执行有效的跳跃捕食,建立狐狸种群的位置更新数学模型,更新ph自动调控器的pid控制器参数值的具体步骤为:
39、step1、判断能量因子是否满足,若是,则按照步骤step2到步骤step4执行改进狐狸优化算法的局部开发位置更新策略,否则按照步骤step5执行全局搜索位置更新策略;
40、step2、局部开发阶段,首先按照公式(6)计算狐狸与猎物之间的距离,所述距离由猎物声音传播到狐狸个体的时间和声音在空气中的传播速度决定;
41、(6);
42、式中,为第次迭代时狐狸与猎物之间的距离,为声音在空气中的传播速度,为猎物声音传播时间;
43、step3、得到狐狸和猎物之间的距离后,模拟狐狸跳跃捕捉猎物,通过公式(7)计算跳跃高度,设计狐狸跳跃高度数学模型:
44、(7);
45、式中,为当前迭代次数;
46、step4、根据狐狸与猎物之间的距离和狐狸跳跃高度,设计公式(8)局部开发阶段的位置更新数学模型;
47、(8);
48、式中,为第次迭代的狐狸种群位置,为控制开发阶段模式的参数,当随机参数q>0.18时,取值为0.18,否则取值为0.82;
49、step5、全局搜索阶段,为了确保狐狸随机地向最佳位置行走,使用一个最小的时间变量mint和改进后的搜索速度控制因子来控制搜索;按照公式(9)更新种群各个体位置;
50、(9);
51、式中,为当前迭代的种群最佳位置,为模拟狐狸走向新猎物位置的最小时间变量,为从问题维度d中随机选择的一个变量值,为当前迭代次数。
52、优选地,目标函数采用微藻生长的目标ph值与实时ph值两者差值平方积分与调控时间的平方的和设计,数学模型公式为:
53、(4);
54、式中,为总的调控时间,由狐狸优化算法最大迭代次数决定,为当前时间,为当前时刻第个狐狸个体位置的适应度值。
55、优选地,利用柯西变异扰动策略,如公式(5),对当前陷入局部最优解的狐狸个体位置扰动,生成新的位置,跳出算法局部最优解;
56、(5);
57、式中,为第次迭代的狐狸种群位置,为当前迭代的种群最佳位置,cauchy\left [ {0,exp\left ( {\frac {it} {t}} \right )} \right ]为柯西分布函数。
58、优选地,二氧化碳释放量由微藻生长环境的ph值决定,是一种间接式决定,采用增量式pid作为ph自动调控器的控制器。
59、优选地,步骤s6中,将与步骤s4得到的最佳kp、ki、kd控制参数输入到pid控制器,用下式计算出pid控制器最佳控制量,控制ph自动调控器更精准的释放二氧化碳量;
60、;
61、式中,kp为增量式pid控制器的比例参数,ki为增量式pid控制器的积分参数,kd为增量式pid控制器的微分参数,为当前时刻的前一次微藻生长的目标ph值与实时ph值两者的差值,为t-1时刻的前一次微藻生长的目标ph值与实时ph值两者的差值。
62、本发明有益效果是:
63、改进狐狸优化算法,通过“空间监测”机制改进狐狸优化算法的寻优机制,及时发现次优解并通过随机扰动跳出局部最优解,提高狐狸优化算法寻优的精度和效率;改进狐狸优化算法全局搜索阶段的搜索速度控制因子,从而优化全局搜索阶段算法位置更新策略,提高狐狸优化算法的全局搜索和收敛的平衡性,利用改进后的狐狸优化算法(ifox)整定ph自动调控器的pid控制器的参数,提高ph自动调控器对二氧化碳(co2)释放量的控制精度,从而精确控制环境ph值,提高微藻的生长效率,从而在更短的时间内获得更多的微藻。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198461.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表