一种基于滑模算法的振动辅助钻削控制方法
- 国知局
- 2024-07-31 23:46:31
(一)本发明属于永磁同步电机控制技术及小深孔钻削技术研究领域,具体涉及一种基于滑模算法的振动辅助钻削控制方法。
背景技术:
0、(二)背景技术
1、为了满足精密零件的装配需求,往往需要利用小深孔钻削技术对零件进行大量的钻孔操作。然而由于普通钻削的切削力过大会使被加工件产生分层撕裂等缺陷,所以人们会采用振动辅助钻削的方法来减小切削力。实现振动辅助钻削的方法有很多,包括振动辅助钻削变幅杆、各向异性刚度特性的刀具等。根据进给电机、主轴电机和被加工件等设备设计出合理的振动辅助钻削方法,这涉及到硬件材料、机械结构和运动控制等领域。
2、从运动控制的研究领域来看,在切削方向上叠加一个周期性的正弦信号,能够影响钻头的运动轨迹实现振动辅助钻削。结合滑模算法中符号函数易出现抖振的问题,调整参数后,永磁同步电机输出的转速曲线类似周期性的正弦信号。由此提出了一种基于滑模算法的振动辅助钻削控制方法。
技术实现思路
0、(三)技术实现要素:
1、本发明提出了一种基于滑模算法的振动辅助钻削控制方法,旨在利用滑模算法中符号函数的抖振影响钻头的运动轨迹实现振动辅助钻削。
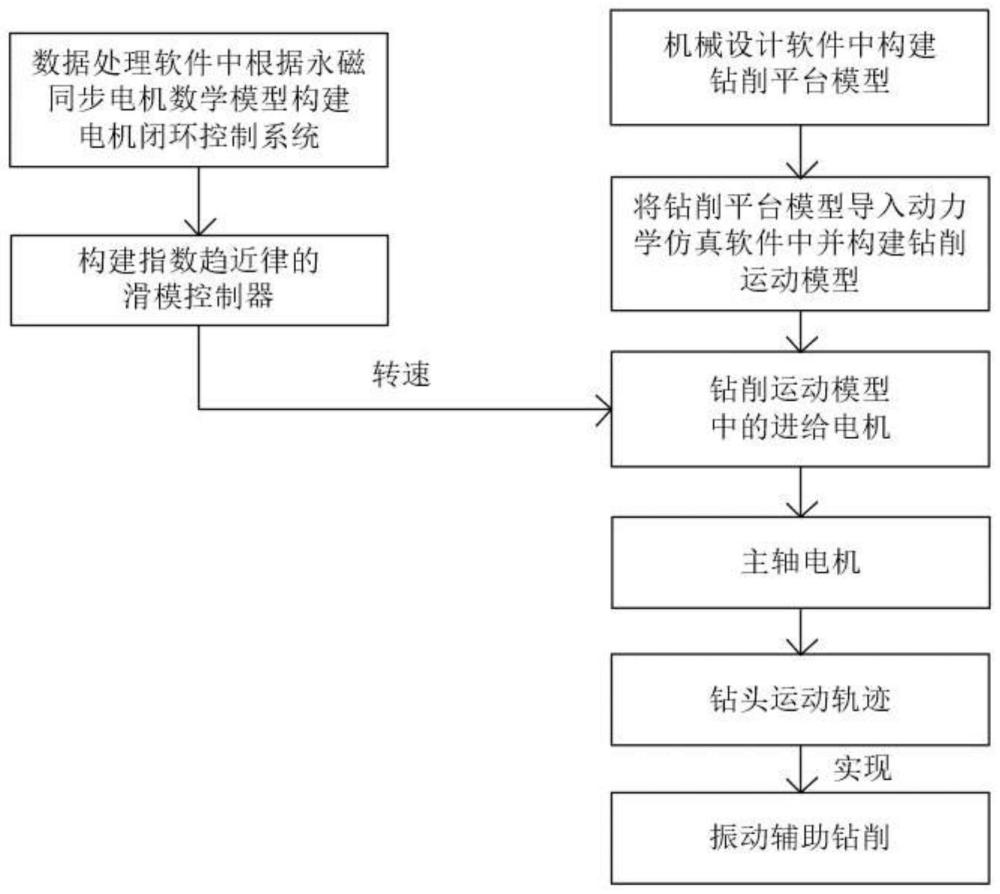
2、本发明提出了一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,所述方法包括以下步骤:
3、s1.在数据处理软件中根据永磁同步电机的数学模型构建电机闭环控制系统;
4、s2.构建指数趋近律的滑模控制器;
5、s3.将钻削平台模型导入动力学仿真软件中,设置固件间的运动副和驱动,构建钻削运动模型;
6、s4.将数据处理软件中永磁同步电机控制系统与动力学仿真软件中钻削运动模型进行联合仿真,利用永磁同步电机控制系统控制进给电机实现振动辅助钻削;
7、进一步地,步骤s1中所述永磁同步电机的系统模型为:
8、
9、其中,ua、ub、uc为电机定子三相绕组的相电压,r为电机定子三相绕组的相电阻,ia、ib、ic为电机定子三相绕组的相电流,ψa、ψb、ψc为电机定子三相绕组的全磁链,te为电机的电磁转矩,ω为电机的转子转速,θ为电机转子实时角位移,tl为电机的负载转矩,j为转子的转动惯量,b为粘滞摩擦系数。
10、进一步地,步骤s2中所述指数趋近律的滑模控制器为:
11、
12、其中,为指数趋近律函数,iq*为控制器函数,pn为极对数,ψf为永磁体磁链,x2为转速误差的变化率,c、ε和q为待设计参数,s为滑模面,sign(s)为符号函数。
13、进一步地,本发明搭建了永磁同步电机的闭环控制系统模型,包含永磁同步电机本体、电机转速检测器、转速控制器、电机驱动器,所述电机转速检测器用于反馈电机转速信息给转速控制器,所述速度控制器输出信号至所述电机驱动器,所述电机驱动器用于驱动永磁同步电机本体工作,所述转速控制器用于实现权利要求1所述的方法步骤。
14、进一步地,本发明将钻削平台模型导入动力学仿真软件中。在动力学仿真软件中设置固件间的约束关系,构建钻削运动模型,设置状态变量“speed”用于将数据处理软件中永磁同步电机的角速度数据传输到动力学仿真软件中进给电机的电机轴上,设置状态变量“y”用于观察主轴电机钻头在y方向上的运动轨迹。
15、进一步地,本发明通过在动力学仿真软件中设置的状态变量“speed”将数据处理软件中永磁同步电机控制系统与动力学仿真软件中钻削运动模型进行联合仿真。通过观察状态变量“y”的数据,即钻头在y方向上的运动轨迹表明利用永磁同步电机控制系统控制进给电机实现了振动辅助钻削。
16、本发明的有益效果为:
17、本发明联合了数据处理软件复杂逻辑系统建模和动力学仿真软件运动学建模的优点,采用永磁同步电机闭环控制系统与钻削运动模型联合仿真分析滑模算法控制进给电机能否实现振动辅助钻削。根据联合仿真中状态变量y的数据显示,合理地调整指数趋近律滑模控制器中c、ε和q的参数能够影响钻头的运动轨迹,使钻头在y方向上伴随抖振下降实现振动辅助钻削。在小深孔钻削领域,为实现振动辅助钻削提供了一种新方法和新思路。
技术特征:1.一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,其特征在于,步骤s1所述永磁同步电机的系统模型为:
3.根据权利要求1所述的一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,其特征在于,步骤s2所述指数趋近律的滑模控制器为:
4.根据权利要求1所述的一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,其特征在于,步骤s3所述将钻削平台模型导入动力学仿真软件中。在动力学仿真软件中设置固件间的约束关系,构建钻削运动模型,设置状态变量“speed”用于将数据处理软件中永磁同步电机的角速度数据传输到动力学仿真软件中进给电机的电机轴上,设置状态变量“y”用于观察主轴电机钻头在y方向上的运动轨迹。
5.根据权利要求1所述的一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,其特征在于,步骤s4所述通过在动力学仿真软件中设置的状态变量“speed”将数据处理软件中永磁同步电机控制系统与动力学仿真软件中钻削运动模型进行联合仿真。通过观察状态变量“y”的数据,即钻头在y方向上的运动轨迹表明利用利用永磁同步电机控制系统控制进给电机实现了振动辅助钻削。
技术总结本发明公开了一种基于滑模算法的振动辅助钻削控制方法,利用滑模算法的稳态抖振实现振动辅助钻削,所述方法包括如下步骤:S1:在数据处理软件中根据永磁同步电机的数学模型构建电机闭环控制系统;S2:构建指数趋近律的滑模控制器;S3:将钻削平台模型导入动力学仿真软件中,设置固件间的约束关系,构建钻削运动模型;S4:将数据处理软件中永磁同步电机控制系统与动力学仿真软件中钻削运动模型进行联合仿真,利用永磁同步电机控制系统控制进给电机实现振动辅助钻削。本发明为实现振动辅助钻削提供了一种新方法。技术研发人员:胡鸿志,宋旭钊,苏弘杰,管芳,苏海涛,徐翠锋受保护的技术使用者:桂林电子科技大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198451.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表