足球场草坪质量评价机器人控制系统及路径规划方法
- 国知局
- 2024-08-01 00:06:11
本发明涉及智能农业领域,更具体地说是一种足球场草坪质量评价机器人控制系统及路径规划方法。
背景技术:
1、草坪是足球场的核心,其质量的高低决定着足球比赛能否正常运行。除灌水施肥均匀、无病虫等一般要求外,标准足球场对草坪密度、均匀度、色泽、硬度、摩擦系数等直接影响运动员竞技水平的坪观质量参数有着严格的要求,需要进行频繁地、快速地监测。然而,受限于草坪运动功能以及密集分布下的成本约束,现有的地上或地下固定埋设的传感器系统不但功能上无法满足球场坪观质量参数的监测需求,采集的信息也有较强的单一性、片面性,导致当前国内外足球场坪观质量测定仍以人工为主。
2、在数据采集方式方法上,中国专利cn 110427032 a提供了一种基于流动型数据采集点的农业数据采集方法及系统,该系统通过控制机器人以最短行走路径遍历每个数据采集点的方法采集目标农田的农业数据。然而,足球场草坪灌水不均是导致草地平整度、摩擦力差异的关键,在12或24只喷头的标准设计浇灌下,草坪质量分布呈现明显的规则性,上述根据样点确定最短路径的规划方式具有很强的随机性,无法准确、全面地反映足球场草坪状态。在数据计算方法上,如何根据数据进行草坪质量参数评价也尚无报告。为此,亟需开发一种可实现足球场草坪质量评价的自控监测系统及控制方法。
技术实现思路
1、本发明针对人工测定足球场坪观质量参数效率低,缺乏相关自动监测系统的问题,提供了一种足球场草坪智能养护机器人的控制系统及路径规划方法。
2、本发明技术方案如下:
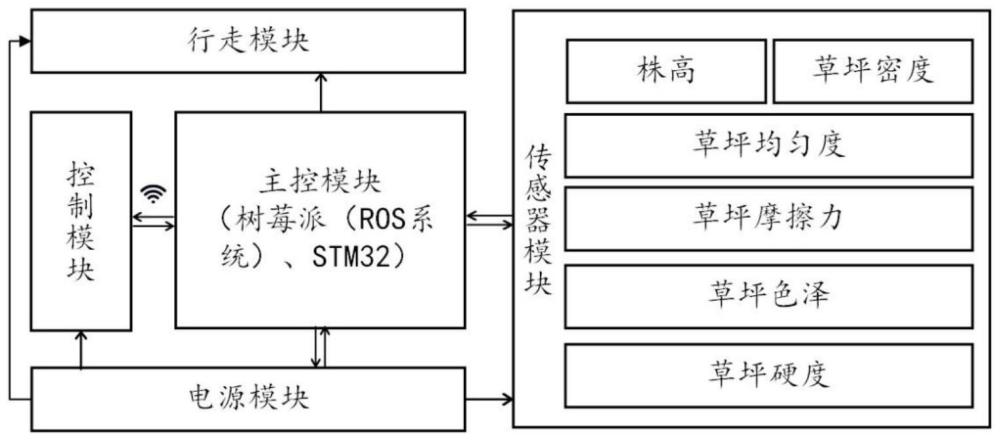
3、足球场草坪智能养护机器人的控制系统,包括:控制模块、主控模块、传感器模块、电源模块和行走模块;其中,
4、所述主控模块由树莓派连接扩载板stm32f4组成,链接并控制行走模块和传感器模块运行,同时通过无线通讯设施与控制模块链接;
5、所述电源模块为控制模块、主控板模块、行走模块及传感器模块供电;
6、所述传感器模块由一系列传感器构成,与主控模块链接,用于采集各项信息,采集后各样点数据暂存主控模块并由主控模块传递给控制模块进行分析;
7、所述行走模块与主控模块链接,主要包括舵机、磁力计、螺旋仪、加速度计等,用于控制机器人行走速度和方向。
8、所述传感器模块主要包括:
9、视觉传感器,即摄像头,摄像头采集植物叶片颜色特征;
10、环境传感器,即电子气象仪,电子气象仪采集环境温度、湿度、气压等气象数据;
11、测距传感器,即激光雷达lidar,激光雷达对机器人运行过程中进行株高测量和壁障数据监测;
12、全球定位系统(rtk/gps),用于机器人位置确定;
13、ndvi光谱测量仪,用于ndvi光谱数据的采集;
14、土壤硬度仪或自制弹簧硬度仪,用于草坪硬度信息采集。
15、所述控制系统具体步骤包括:
16、s1:输入机器人作业起始时间、足球场草坪地理位置、灌溉设备位置信息、,基于灌溉设施位置及采集样点位置公式(公式1-9)确定草坪样区及各样区采集样点位置,完成工作区域的划分。
17、s2:获取机器人位置信息,控制模块基于样区采集样点位置信息和机器人位置信息完成全局路径规划。
18、s3:机器人终端接收控制模块的路径规划信息,结合机器人主控模块、传感器模块以及行走模块完成各采集样点信息的采集,并将采集样点信息发送至控制模块进行数据处理分析。
19、在步骤s3的3-1中,用户输入机器人作业起始时间、草坪位置、灌溉设施位置信息。机器人作业起始时间用于机器人定时进入场地采集作业,草坪位置包括地理经纬度、草坪规整边界,灌溉设备位置包括喷嘴地理经纬度、喷嘴x、y轴方向(西、北方向)间距长度。随后,根据草坪边界、喷嘴位置划分样区,基于采集样点位置公式(公式1-8)确定草坪各样区采集样点位置,完成工作区域的划分。
20、在步骤s3的3-2中,通过内载全球定位系统确定机器人位置并传输给主控模块,主控模块将机器人位置信息与样区采集点位置信息通过无线通讯设施传输至控制模块,控制模块基于位置信息,完成全局路径规划。
21、在步骤s3的3-3中,包括:
22、1)机器人通过路由器、wifi网络等无线通讯设施接收控制模块的路径规划坐标信息。
23、2)机器人接收路径规划坐标信息后主控模块发送命令至行走模块驱动舵机运行,到达指定样点区域上方主控模块发送制动命令至行走模块制动舵机运行,制动5秒后开始信息采集,随后依次进行光谱数据、采集图片信息和硬度信息采集,采集信息实时输送至主控模块进行数据预处理和储存。在完成样点信息采集后,依据控制模块指令前往路径下一样点进行信息采集,直至完成所有样点信息采集。
24、其中,草坪密度指标通过计算采集样区内归一化植被指数(ndvi)数值的大小进行判别,具体的,ndvi数值越高则代表草坪密度较高;草坪均匀度和色泽指标通过等同样区面积内ndvi的浮动情况进行诊断评价,可选的,如通过分析相同样区内样点ndvi数值的方差值σ进行草坪均匀度信息检测与评价。
25、其中,草坪色泽指标数据通过提取各样点可见光图片rgb值计算得到,即将样区内rgb数值转化成色相hue值,利用实际hue数值与理想hue值差距对草坪色泽进行检测与评价。
26、其中,草坪硬度指标通过土壤硬度仪直接测量获得,或自制弹簧硬度仪测量获得,具体的自制弹簧硬度仪通过测量草坪中各样点向下压缩弹簧至切向方向变形最大时的最大弹力值f1。利用硬质地面中最大弹力值f0与f1之间的关系计算硬度系数k用于草坪硬度信息检测与评价。
27、其中,草坪摩擦力数据通过检测足球场草坪表面摩擦力即草坪摩擦系数得到,具体的保持机器人采集样点两点间路径距离s相等,并记录两点间机器人行走时间间隔t,通过s、机器人匀速加速度a、机器人垂直力f(重力)之间的关系计算摩擦系数用于草坪摩擦力信息检测。(两样点之间行走过程每5s进行一次避障雷达测量)。
28、足球场草坪质量评价机器人路径规划方法为:为保证采集样点的可靠性,依据足球场草坪各样区灌溉水分重叠程度选取六个代表性样点,样区划分及采集样点具体计算方法为:
29、1)定义草坪任意边界朝西方向为样区y轴方向,垂直方向为x轴方向。
30、2)将草坪边界坐标转换到平面直角坐标,设足球场草坪长度与宽度为l和w,即x、y轴边界长度分别为l、w,其中,w=68m,l=110m;设西、北方向(y、x方向)两喷头最大间距分别为2a、2a。
31、3)定义样区b为长宽分别为2a、2a的四边形,其中a、a分别为样区西、北方向(y、x方向)1/2边长长度,参考实际喷嘴喷射模式,取样区内不同水分重叠区域内6个点作为样点,其中取样区内几何中心为第一个采集样点,以第一个采集点为位置参照确定剩余五个样点,具体位置参考公式如下(公式1-8)。
32、4)记样区内几何中心在x和y轴上的坐标分别为(2i+1)a、(2j+1)a,且i=0,1,2,3…;j=0,1,2,3…。以样区几何中心坐标i、j的取值定义样区,各样区分别记为bij完成工作区域划分,样区总数为(c+1)*(d+1)。
33、采集样点坐标表达式为:
34、
35、
36、式中l为草坪y轴方向边界长度,w为草坪x轴方向边界长度;c,d分别为取得的i、j的上限值,其中为向上取整函数;
37、圆心采集样点坐标:
38、((2i+1)·a,(2j+1)·a),i=0,1,2,3...,j=0,1,2,3... (公式3)
39、圆心采集样点右侧采集样点坐标:
40、
41、
42、中心采集样点左侧采集样点坐标:
43、
44、
45、((2i+1)·a-a,(2j+1)·a),i=0,1,2,3...,j=0,1,2,3... (公式8)
46、式中a为样区朝西方向(y轴方向)1/2边长长度;a为样区朝北方向(x轴方向)1/2边长长度。
47、路径规划,为满足步骤3中草坪摩擦力数据的采集,即行走过程中采集样点两点间路径距离s相等的要求,根据上述步骤2中采集样点的坐标位置,路径呈s形规划布置:
48、具体的,以b00样区(0.5a,0.5a)样点为起点,x轴方向增量跨度为1a确定路径下一个样点坐标,当样点x轴坐标取值为(2i+1)a+0.5a,i=c时或(2i+1)a,i=c时,改变路径方向,到达下一目标样点,x轴方向增量跨度为-1a确定路径下一个样点坐标;当样点x轴坐标取值为(2i+1)a-0.5a,i=0时或(2i+1)a-a,i=0时,改变路径方向,以x轴方向增量跨度为1a确定路径下一个样点坐标以此循环确定路径坐标,直至到达终点样点轴坐标为((2i+1)a-0.5a,(2j+1)a-0.5a),i=0,j=d(当d/2≠0)或((2i+1)a+0.5a,(2j+1)a+0.5a),i=c,j=d(当d/2=0)完成全局路径规划。
49、机器人作业流程为:机器人根据设置时间定时进入足球场草坪,依据规划路径进行样点信息采集,传感器模块采集信息数据并将数据传输储存于主控模块并最终传送至控制终端进行分析评价,继而为后期养护处理提供有力依据。
50、本发明的技术效果和优点:
51、1)本发明提供了一种足球场草坪质量评价机器人控制系统及路径规划方法,该方法针对足球场特殊性质草坪的草坪质量监测需求,在考虑了喷灌系统对草坪生长影响的基础上,创新性的提供了一种路径规划方法,并通过各模块协调作业,实现代表性样点的全面监测,为精准养护提供了技术方法支持;
52、2)本发明原创性的提出了两样点间等距离测量草坪摩擦力指标的方法,简化了通过传统运动表面测量仪测量的繁琐步骤;
53、3)本发明提供的一种足球场草坪质量评价机器人的控制系统及方法用于快速评价足球场草坪质量,该系统集成了多种移动式传感器,小巧灵活便于移动,避免了嵌入式硬件设施对草坪生长的影响。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199685.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表