一种无人机集群协同控制系统
- 国知局
- 2024-08-01 00:13:21
本发明涉及无人控制,尤其涉及一种无人机集群协同控制系统。
背景技术:
1、随着技术不断成熟,无人机将广泛应用于农业监测、城市管理、生态保护、生产流程监测、急救救援等诸多领域。
2、公开号cn115712259a的专利文献公开了一种多无人机平台协同控制系统,包括数据采集端、协同控制端以及显示终端和实时定位端,所述协同控制端包括风阻系数处理单元、参数修正单元、定位参数处理单元、控制单元以及反馈单元;所述数据采集端,用于对多组无人机的机身参数以及外部的风速进行获取,并将所获取的机身参数以及风速传输至协同控制端内;所述实时定位端,用于对不同的无人机进行实时定位,并将所定位的点位参数传输至协同控制端内;所述协同控制端内部的定位参数处理单元,用于对所定位的点位参数进行获取,并对所获取的点位参数进行处理,以一组无人机为初始机位,通过初始机位的点位参数,对下一组无人机进行限制,并生成捆绑数据包,并将此捆绑数据包传输至控制单元;所述反馈单元,用于对多组无人机的点位参数进行获取并传输至控制单元内,控制单元查看固定点位参数是否与映射点一致,若处于一致状态,则不进行操作,若处于不一致状态,则需对指定的无人机进行控制调整;所述风阻系数处理单元,对采集得到的机身参数以及风速进行接收,并根据接收到的机身参数以及风速,对风阻系数进行处理判定,并根据不同的风阻系数,对不同无人机的机身参数进行修正,生成修正数据包,并将修正数据包传输至参数修正单元内;参数修正单元根据接收到的修正数据包,对指定的无人机进行转速修正处理,使多组无人机保持在同一排列阵线内。
3、由此可见,现有技术中的多无人机平台协同控制系统任务划分难度大导致系统的协同能力差的问题。
技术实现思路
1、为此,本发明提供一种无人机集群协同控制系统,用以克服现有技术中的多无人机平台协同控制系统任务划分难度大导致系统的协同能力差的问题。
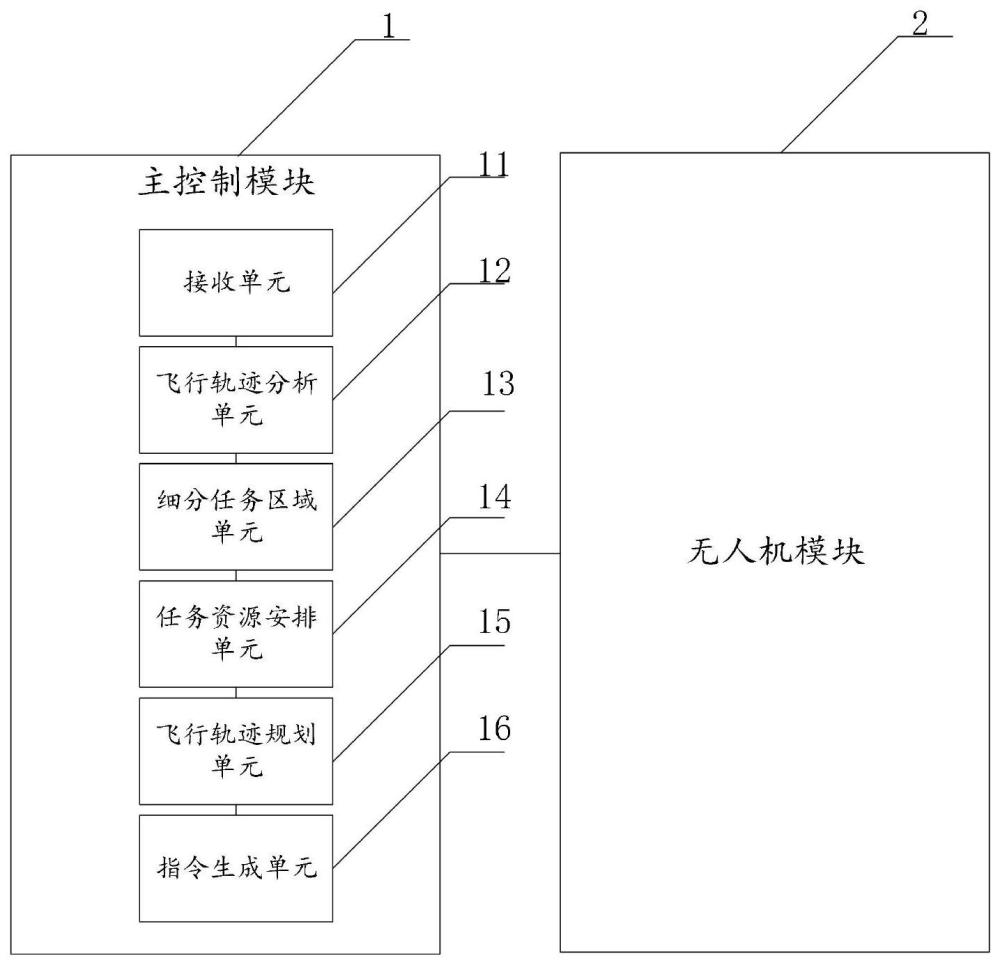
2、为实现上述目的,本发明提供一种无人机集群协同控制系统,包括:
3、主控制模块,用于接收飞行任务信息并形成飞行指令;
4、无人机模块,包括若干带有摄像头的无人机,与所述主控制模块连接,用于根据所述飞行指令生成飞行路径,以及,用于根据所述飞行路径执行飞行并采集图像;
5、所述主控制模块还用于根据所述图像调整所述飞行指令;
6、所述飞行任务信息包括飞行任务区域、飞行高度、航线模式、拍摄图像分辨率要求、任务时限、无人机需求数量和安全要求;
7、所述主控制模块包括:
8、接收单元,用于接收所述飞行任务区域、航线模式、拍摄图像分辨率要求、任务时限、无人机需求数量和安全要求;
9、飞行轨迹分析单元,与所述接收单元连接,用于根据所述飞行任务区域和航线模式绘制任务区域图,以及,用于根据所述任务区域图、所述拍摄图像分辨率要求计算飞行轨迹相邻间距;
10、细分任务区域单元,与所述飞行轨迹分析单元连接,用于根据所述飞行轨迹相邻间距将所述飞行任务区域划分为单元格;
11、任务资源安排单元,与所述细分任务区域单元连接,用于根据所述无人机需求数量和任务时限安排所述单元格内完成任务的无人机数量和预计完成时长;
12、飞行轨迹规划单元,与所述接收单元连接,用于根据所述安全要求设置轨迹点位;
13、指令生成单元,分别与所述任务资源安排单元和所述飞行轨迹规划单元连接,用于根据所述单元格内完成任务的无人机数量和预计完成时长以及所述轨迹点位生成飞行指令。
14、进一步地,所述飞行轨迹分析单元包括:
15、绘制子单元,用于根据所述飞行任务区域的边界坐标信息和航线模式,绘制任务区域图,以及,用于标注所述任务区域图内的障碍物位置;
16、区域划分子单元,与所述绘制子单元连接,用于根据所述任务区域图和所述障碍物位置将任务区域图划分为可飞行区域和不可飞行区域;
17、间距计算子单元,与所述区域划分子单元连接,用于根据所述摄像头的焦距和像素尺寸以及所述拍摄图像分辨率要求计算出最大飞行高度,以及,用于根据所述最大飞行高度和所述摄像头的焦距和像素尺寸计算飞行轨迹相邻间距。
18、进一步地,所述区域划分子单元包括:
19、区域划分子任务单元,用于将所述任务区域图的飞行任务区域划分为若干面积为1平方米的子区域;
20、统计子任务单元,用于统计每个所述子区域内障碍物的数量;
21、指标计算子任务单元,与所述统计子任务单元连接,用于根据所述飞行任务区域内障碍物的数量和所述子区域的数量计算平均值和标准差;
22、障碍物密度阈值设置子任务单元,与所述指标计算子任务单元连接,用于根据所述平均值和标准差设置障碍物密度阈值,所述障碍物密度阈值为平均值+2倍标准差;
23、划分子任务单元,与所述计算子任务单元连接,用于对比所述障碍物密度阈值和子区域内的障碍物数量;
24、若所述子区域内的障碍物数量大于所述障碍物密度阈值,则所述划分子任务单元判定当前子区域为不可飞行区域;
25、若所述子区域内的障碍物数量小于等于所述障碍物密度阈值,则所述划分子任务单元判定当前子区域为可飞行区域。
26、进一步地,所述间距计算子单元包括:
27、飞行高度计算子任务单元,用于根据飞行高度公式计算最大飞行高度,h=f×s/(r×l),其中h为最大飞行高度,f为摄像镜头的焦距,s为摄像头传感器像素尺寸,r为期望的地面像素分辨率,l为拍摄物体在地面的尺寸;
28、飞行轨迹间距计算子任务单元,与所述飞行高度计算子任务单元连接,用于根据摄像头的焦距f和传感器像素尺寸s计算光斑尺寸b,b=f×s/h,以及,用于计算光斑长轴半径a和短轴半径b,a=b/2,b=b/2×tan30°,以及,用于根据所述光斑长轴半径a和短轴半径b计算投影到地面的单个飞行轨迹下的覆盖区域的长轴半径c和短轴半径d,c=a×h,d=b×h,并根据所述长轴半径c和短轴半径d将单个飞行轨迹下的覆盖区域表示为以(0,0)为中心,长轴半轴为c,短轴半轴为d的椭圆形区域,以及,用于根据预设的重叠阈值30%和公式计算飞行轨迹相邻间距,飞行轨迹相邻间距=c-0.3×c。
29、进一步地,所述细分任务区域单元包括:
30、规划子单元,用于在任务区域图上,从一个起点位置开始,按照所述飞行轨迹间距大小规划出初始飞行轨迹线路,并根据第一条飞行轨迹线路,沿着相同方向,等间距绘制出接下来的飞行轨迹线路,直至打满任务区域图;
31、单元格确定子单元,与所述规划子单元连接,用于确定所述任务区域图被连续飞行轨迹线路包围且分隔开来的区域为单元格。
32、进一步地,所述任务资源安排单元包括:
33、数据采集子单元,用于收集和汇总各种任务数据,如任务区域细分结果、每个单元任务内容和总无人机数量;
34、估算子单元,与所述数据采集子单元连接,用于通过使用估算公式估算单个无人机完成每个单元任务需要的时间,单个无人机完成每个单元任务需要的时间=面积/飞行速度+任务时间×面积比例;
35、任务分配子单元,与所述估算子单元连接,用于使用任务平衡算法,根据总任务时限要求计算每个单元应分配的无人机数量;
36、输出子单元,与所述任务分配子单元连接,用于按照任务分配结果,输出每个单元分配的无人机数量和预计完成时间。
37、进一步地,所述飞行轨迹规划单元包括:
38、安全区域分析子单元,用于根据任务区域内的障碍物分布情况,划分出任务区域内不同等级的安全区域;
39、轨迹点初始设置子单元,用于在安全区域分析结果基础上,根据任务区域形状和大小信息,初步在各安全区域内设置轨迹点的分布;
40、轨迹安全距离计算子单元,与所述轨迹点初始设置子单元连接,用于使用欧几里得距离算法计算相邻两个轨迹点之间的最小安全距离;
41、轨迹优化子单元,与所述轨迹安全距离计算子单元连接,用于根据所述最小安全距离对初始轨迹点进行优化;
42、输出子单元,与所述轨迹优化子单元连接,用于输出最终通过优化得到的轨迹点坐标信息。
43、进一步地,所述安全区域分析子单元还用于将障碍物区域通过缓冲分析划分为禁飞区、警告区和正常区,
44、所述禁飞区为障碍物体直线距离内50米范围内;
45、所述警告区为障碍物体直线距离50-100米范围内;
46、所述正常区为障碍物体直线距离超过100米范围内。
47、进一步地,所述轨迹点初始设置子单元包括:
48、禁飞区坐标点生成子任务单元,用于在禁飞区内使用随机数生成器生成禁飞区坐标点,并确保生成的禁飞区坐标点都在禁飞区的范围内;
49、警告区坐标点生成子任务单元,用于根据任务区域的形状和大小信息,在警告区内选择概率分布生成方法生成初始轨迹点的警告区坐标点,并确保生成的警告区坐标点在警告区的范围内;
50、正常区坐标点生成子任务单元,用于根据任务区域的形状和大小信息,选择均匀分布生成方法生成初始轨迹点的正常区坐标点,并确保生成的正常区坐标点在正常区的范围内。
51、进一步地,所述轨迹安全距离计算子单元包括:
52、轨迹点坐标获取子任务单元,用于获取相邻两个轨迹点的经度和纬度;
53、安全距离计算子任务单元,与所述轨迹点坐标获取子任务单元连接,用于通过将所述相邻两个轨迹点的经度和纬度使用球面坐标系转直角坐标系转换方法转换为直角坐标系下的三维坐标,并计算所述相邻两个轨迹点的经度的经度差值和纬度的纬度差值,并将所述经度差值的平方和维度差值的平方相加得到的平方和开平方根,以得到最小安全距离。
54、进一步地,所述轨迹安全距离计算子单元包括:
55、轨迹点坐标获取子任务单元,用于获取相邻两个轨迹点的经度和纬度;
56、安全距离计算子任务单元,与所述轨迹点坐标获取子任务单元连接,用于通过将所述相邻两个轨迹点的经度和纬度使用球面坐标系转直角坐标系转换方法转换为直角坐标系下的三维坐标,并计算所述相邻两个轨迹点的经度的经度差值和纬度的纬度差值,并将所述经度差值的平方和维度差值的平方相加得到的平方和开平方根,以得到最小安全距离。
57、与现有技术相比,本发明的有益效果在于,飞行任务区域的指定和飞行高度的设定使得无人机能够在指定区域内进行精准的飞行和拍摄任务,满足任务需求,航线模式的选择能够确保无人机按照特定的航线路径进行飞行,保证了任务的规律性和系统性,拍摄图像分辨率的要求使得无人机能够采集到高质量的图像数据,提供更清晰、详细的信息供后续处理和分析,任务时限的设定确保任务按时完成,提高工作效率和任务执行的准确性,无人机需求数量的要求根据任务的性质和规模来合理配置无人机资源,提供足够的飞行和图像采集能力,安全要求的设定保证无人机在飞行过程中遵守安全规定,减少事故发生的风险,通过绘制任务区域图和计算飞行轨迹间距,优化了飞行路径规划,提高了任务执行的精确性和效率,划分任务区域单元和安排任务资源,合理分配无人机数量和时间,提高了任务的管理和执行效果,设定飞行轨迹点位和安全要求,生成飞行指令根据任务资源安排和飞行轨迹规划,确保了无人机按预期完成任务和采集图像的要求。
58、进一步地,绘制子单元的任务区域图绘制和障碍物标注,提供了清晰的任务执行地图,有助于任务规划的准确性,区域划分子单元的可飞行区域和不可飞行区域划分,确保了无人机在可飞行区域内执行任务,减少了任务风险,间距计算子单元的最大飞行高度计算和飞行轨迹间距计算,保证了飞行高度的合理性和轨迹间距的足够,提高了图像采集的效果。
59、进一步地,区域划分子单元将飞行任务区域细分为子区域,提供了细粒度的飞行控制和任务规划的基础,统计子任务单元和计算子任务单元的工作获得每个子区域内障碍物数量的统计数据,提供了对任务区域的障碍物密度的评估,障碍物密度阈值设置子任务单元根据统计数据设定障碍物密度阈值,能够根据实际情况调整飞行策略,确保飞行安全,划分子任务单元根据阈值与障碍物数量进行对比,将子区域划分为可飞行区域和不可飞行区域,提供了针对每个子区域的飞行控制。
60、进一步地,飞行高度计算子任务单元根据特定的参数和公式,计算出最大飞行高度,确保了飞行的安全性和合理性,飞行轨迹间距计算子任务单元根据光斑尺寸和覆盖区域的参数,准确计算飞行轨迹的相邻间距,实现了飞行路径的优化和图像采集的高效率,通过合理的飞行高度和间距计算,确保无人机在飞行过程中具备足够的视野范围和图像重叠区域,提高图像质量和任务执行效果。
61、进一步地,规划子单元的工作能够根据飞行轨迹间距规划出初始飞行轨迹线路,并绘制后续的飞行轨迹线路,确保飞行路径的平衡分布和合理覆盖整个任务区域,单元格确定子单元的工作能够将任务区域图分隔成连续的、被飞行轨迹线路包围的区域,形成单元格,方便任务的分派、监控和管理。
62、进一步地,数据采集子单元的工作能够收集和汇总任务相关的数据,为后续的任务分配和管理提供准确的参考,估算子单元通过估算每个单元任务完成所需的时间,提供了任务执行的时间预估,便于任务计划和执行进度的掌握,任务分配子单元根据总任务时限和任务平衡算法,合理分配无人机数量,提高任务执行的效率和资源的利用率,输出子单元根据任务分配结果,输出每个单元分配的无人机数量和预计完成时间,为任务执行的组织和监控提供了便利。
63、进一步地,安全区域分析子单元的工作能够根据障碍物分布情况划分出不同的安全区域,提供了对任务区域安全性的评估,轨迹点初始设置子单元根据安全区域和任务区域信息初步设置轨迹点的分布,为后续优化提供了基础,轨迹安全距离计算子单元的计算工作考虑了安全机动距离的要求,确保轨迹点之间的安全距离足够,轨迹优化子单元的工作对初始轨迹点进行优化,进一步提高了轨迹的安全性和飞行效率,输出子单元输出最终的轨迹点坐标信息,为飞行任务的执行提供了最优的飞行轨迹规划。
64、进一步地,安全区域分析子单元的工作通过划分禁飞区、警告区和正常区,清晰地确定了无人机在不同距离障碍物的区域内的飞行限制和警示,禁飞区的划分能够有效避免无人机与障碍物发生碰撞,提高飞行安全性,警告区的划分可提醒无人机飞行时要保持警惕,降低意外风险,正常区的划分可保证无人机在距离障碍物较远的区域内正常飞行,提高飞行效率和任务执行能力。
65、进一步地,通过轨迹点初始设置子单元的工作过程,有效地生成符合要求的初始轨迹点。禁飞区坐标点生成子任务单元确保生成的坐标点都在禁飞区的范围内,避免无人机进入禁飞区域。警告区坐标点生成子任务单元根据任务区域的大小和形状,生成符合概率分布的坐标点,避开障碍物,并确保在警告区范围内,提高飞行安全性。正常区坐标点生成子任务单元根据任务区域的大小和形状,生成符合均匀分布的坐标点,保证了飞行轨迹的均匀分布,提高了效率和覆盖范围。
66、进一步地,轨迹安全距离计算子单元的工作过程确保了精确获取相邻两个轨迹点的经度和纬度,并通过坐标转换和计算过程得出了最小安全距离,有效地评估相邻两个轨迹点之间的距离,为飞行路径规划提供重要的安全参考,有助于确保飞行器在飞行过程中避开障碍物、维持安全距离,提高了飞行的安全性和可靠性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200071.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表